识别定位标记图形的方法、装置、设备及介质与流程
本发明涉及激光加工,尤其涉及一种识别定位标记图形的方法、装置、设备及介质。
背景技术:
1、现有的激光加工系统中,在板材被送入加工区域前需要在板材的不同区域打上标识,以方便加工区域以及工作人员识别不同的加工零件。在加工过程中,板材在加工板材在机床加工幅面上的位置往往不固定,加工的过程中还需要对板材进行定位,获取加工板材的零点在机床加工幅面坐标系下的坐标以及加工板材的旋转角度信息。
2、目前常采用的方法是对加工板材的边沿进行视觉定位,即通过确定板材的一条边缘以确定加工板材的旋转角度信息,再识别板材的另一条边缘以计算零点位置;
3、然而,这种识别方式的识别精度和成功率与板材边缘效果高度相关。如果板材边缘不是常规的竖直裁断边,则会出现无法识别、误识别、识别结果精度差等问题,进而无法提供给后续加工系统准确的边缘坐标。
4、因而,如何准确地对板材进行定位识别,已成为业界目前亟需解决的技术问题。
技术实现思路
1、本发明提供一种识别定位标记图形的方法、装置、设备及介质,以解决如何准确地对板材进行定位识别的问题。
2、根据本发明的第一方面,提供了一种识别定位标记图形的方法,包括:
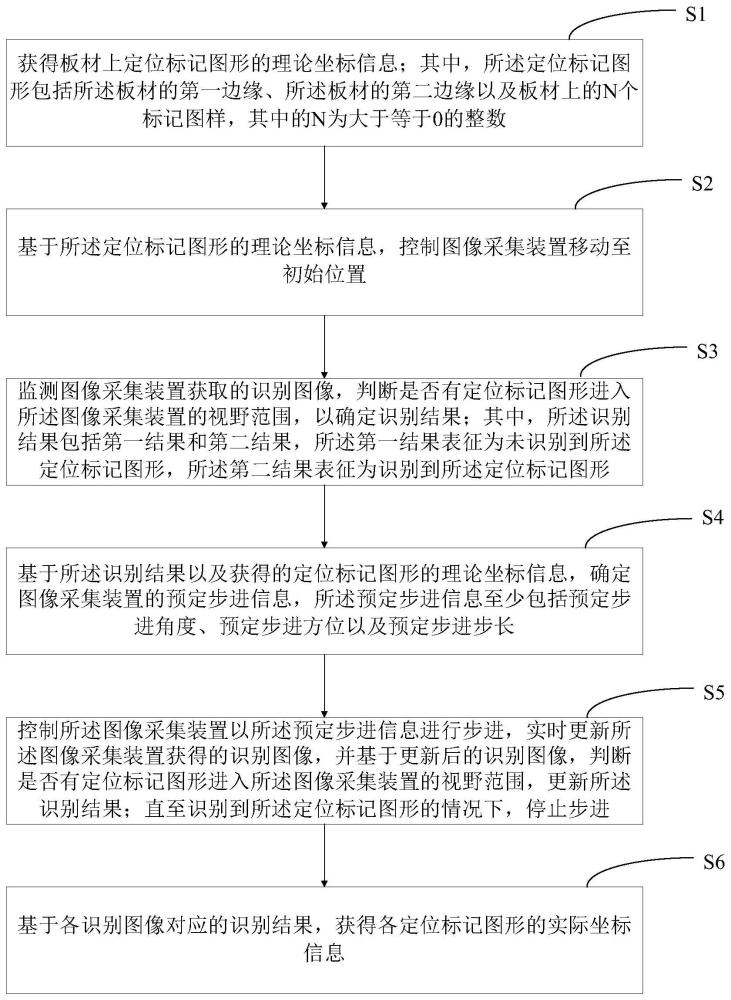
3、获得板材上定位标记图形的理论坐标信息;其中,所述定位标记图形包括所述板材的第一边缘、所述板材的第二边缘以及板材上的n个标记图样,其中的n为大于等于0的整数;
4、基于所述定位标记图形的理论坐标信息,控制图像采集装置移动至初始位置;
5、监测图像采集装置获取的识别图像,判断是否有定位标记图形进入所述图像采集装置的视野范围,以确定识别结果;其中,所述识别结果包括第一结果和第二结果,所述第一结果表征为未识别到所述定位标记图形,所述第二结果表征为识别到所述定位标记图形;
6、基于所述识别结果以及获得的定位标记图形的理论坐标信息,确定图像采集装置的预定步进信息,所述预定步进信息至少包括预定步进角度、预定步进方位以及预定步进步长;
7、控制所述图像采集装置以所述预定步进信息进行步进,实时更新所述图像采集装置获得的识别图像,并基于更新后的识别图像,判断是否有定位标记图形进入所述图像采集装置的视野范围,更新所述识别结果;直至识别到所述定位标记图形的情况下,停止步进;
8、基于各识别图像对应的识别结果,获得各定位标记图形的实际坐标信息。
9、可选的,若获得的标记图样的理论坐标信息的数量为0,且所述识别结果为第一结果,则所述预定步进方位为机床加工幅面坐标系的x轴方向或y轴方向。
10、可选的,若获得的定位标记图形的理论坐标信息的数量至少为1个,且所述识别结果为第二结果;则所述预定步进信息还包括寻找顺序队列。
11、可选的,在确定识别结果之后,且在确定图像采集装置的预定步进信息之前,还包括:
12、设置识别到的所述定位标记图形为第一定位标记图形,并得到所述第一定位标记图形的中心坐标信息;
13、基于所述第一定位标记图形的中心坐标信息以及获得的定位标记图形的理论坐标信息生成寻找顺序队列,所述寻找顺序队列为依次寻找其余的定位标记图形的顺序;获得的各定位标记图形在所述寻找队列里的排序依据为:各定位标记图形的理论坐标信息距离所述识别到的定位标记图形的理论坐标信息的相对距离。
14、可选的,控制所述图像采集装置以所述预定步进信息进行步进,实时更新所述图像采集装置获得的识别图像,具体为:
15、基于所述寻找队列,以初始坐标为圆心,根据第i个定位标记图形的理论坐标信息距离所述第一定位标记图形的理论坐标信息的相对距离,控制所述图像采集装置移动到第i个定位标记图形的第一理论坐标;其中的i为大于等于1的整数,且i小于等于获得的标记图样的理论坐标信息的数量,所述初始坐标为所述第一定位标记图形的中心坐标;
16、控制所述图像采集装置以所述初始坐标为圆心、以r为半径沿顺时针或逆时针以所述预定步进角度步进,以更新所述图像采集装置获得的识别图像;其中r为第i个定位标记图形的理论坐标信息距离所述第一定位标记图形的理论坐标信息的相对距离。
17、可选的,在停止步进之后,且在基于各识别图像对应的识别结果,获得各定位标记图形的实际坐标信息之前,还包括:
18、判断是否完成寻找顺序队列内所有定位标记图形的寻找;
19、若否,则继续寻找第i+1个定位标记图形。
20、可选的,在判断是否有定位标记图形进入所述图像采集装置的视野范围之后,且在确定识别结果之前,还包括:
21、在存在一个所述定位标记图形进入所述图像采集装置的视野范围内的情况下,控制所述图像采集装置的视野中心沿靠近所述定位标记图形的方向移动,以使得所述定位标记图形的中心与所述图像采集装置的视野中心重合;其中,每个定位标记图形的面积均小于所述图像采集装置的视野范围的面积。
22、可选的,所述图像采集装置至所述板材的物距可调。
23、可选的,控制所述图像采集装置的中心沿靠近所述定位标记图形的方向移动,以使得所述定位标记图形的中心与所述图像采集装置的视野中心重合,具体包括:
24、获取模板库内若干个定位标记图形的模板以及所述定位标记图形在图像采集装置视野中的像素信息;其中,所述定位标记图形的模板至少包括对应的标准物距信息以及定位标记图形的形状,所述标准物距信息为所述图像采集装置至所述板材的标准物距;
25、基于定位标记图形的模板改变所述图像采集装置至所述板材的物距,使得所述图像采集装置至所述板材的物距与对应的模板中的标准物距相同,以更新所述定位标记图形在图像采集装置视野中的像素信息;
26、基于更新后的所述定位标记图形在图像采集装置视野中的像素信息,确定图像采集装置的预定移动方向以及预定移动像素长度;
27、基于所述预定移动方向以及所述预定移动像素长度,控制所述图像采集装置的中心沿靠近所述定位标记图形的方向移动,以使得所述定位标记图形的中心与所述图像采集装置的视野中心重合。
28、可选的,所述图像采集装置至所述板材的物距不可调。
29、可选的,控制所述图像采集装置的中心沿靠近所述定位标记图形的方向移动,以使得所述定位标记图形的中心与所述图像采集装置的视野中心重合,具体包括:
30、获取模板库内若干个定位标记图形的模板以及所述定位标记图形在图像采集装置视野中的像素信息;其中,各定位标记图形的模板至少包括对应的标准物距信息以及定位标记图形的形状,所述标准物距信息为所述图像采集装置至所述板材的标准物距;
31、基于所述图像采集装置至所述板材的物距及其对应的所述标准物距信息,计算所述定位标记图形的实际尺寸与所述模板中的定位标记图形的尺寸相似比;
32、基于所述尺寸相似比以及所述定位标记图形在图像采集装置视野中的像素信息,确定图像采集装置的预定移动方向以及预定移动像素长度;
33、基于所述预定移动方向以及所述预定移动像素长度,控制所述图像采集装置的视野中心沿靠近所述定位标记图形的方向移动,以使得所述定位标记图形的中心与所述图像采集装置的视野中心重合。
34、可选的,判断是否有定位标记图形进入所述图像采集装置的视野范围,具体包括:
35、获取模板库内若干个定位标记图形的模板;所述定位标记图形的模板至少包括定位标记图形的形状;
36、基于所述若干个定位标记图形的模板,对所述识别图像进行图像识别;
37、若识别出所述模板中对应的定位标记图形,则确定为第二结果;否则,确定为第一结果。
38、可选的,所述标记图样至少包括圆形、十字形、直线、工装形状。
39、可选的,所述预定步进信息还包括图像采集装置的最大步进步数。
40、可选的,直至识别到所述定位标记图形的情况下,停止步进,具体为:
41、基于所述预定步进信息,判断所述图像采集装置的步进步数是否达到最大步数;
42、若是,则停止所述图像采集装置的步进;
43、若否,则控制所述图像采集装置以所述预定步进信息进行步进,直至识别到所述定位标记图形。
44、可选的,在基于各识别图像对应的识别结果,获得各定位标记图形的实际坐标信息之后,还包括:
45、基于板材上标记的定位标记图形的理论坐标信息以及其对应的定位标记图形的实际坐标,确定所述板材的零点在机床加工幅面坐标系下的坐标以及所述板材在机床加工幅面上的旋转角度信息。
46、根据本发明的第二方面,提供了一种定位标记图形识别系统,用于实现对板材上的定位标记图形进行识别,该系统包括:
47、理论坐标信息获取模块,用于获得板材上定位标记图形的理论坐标信息;其中,所述定位标记图形包括所述板材的第一边缘、所述板材的第二边缘以及板材上的n个标记图样,其中的n为大于等于0的整数;
48、图像采集装置初始化模块,用于基于所述定位标记图形的理论坐标信息,控制图像采集装置移动至初始位置;
49、图像识别模块,用于监测图像采集装置获取的识别图像,判断是否有定位标记图形进入所述图像采集装置的视野范围,以确定识别结果;其中,所述识别结果包括第一结果和第二结果,所述第一结果表征为未识别到所述定位标记图形,所述第二结果表征为识别到所述定位标记图形;
50、步进信息预定模块,用于基于所述识别结果以及获得的定位标记图形的理论坐标信息,确定图像采集装置的预定步进信息,所述预定步进信息至少包括预定步进角度、预定步进方位以及预定步进步长;
51、定位标记图形寻找模块,用于控制所述图像采集装置以所述预定步进信息进行步进,实时更新所述图像采集装置获得的识别图像,并基于更新后的识别图像,判断是否有定位标记图形进入所述图像采集装置的视野范围,更新所述识别结果;直至识别到所述定位标记图形的情况下,停止步进;
52、坐标获取模块,用于基于各识别图像对应的识别结果,获得各定位标记图形的实际坐标信息。
53、根据本发明的第三方面,提供了一种激光切割系统,包括本发明第二方面提供的定位标记图形识别系统。
54、根据本发明的第四方面,提供了一种电子设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现本发明第一方面任一项所述方法的步骤。
55、根据本发明的第五方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现本发明第一方面任一项所述方法中的步骤。
56、本发明提供的识别定位标记图形的方法、装置、设备及介质中,能够在获得板材上定位标记图形的理论坐标信息后,基于该理论坐标信息,控制图像采集装置移动至初始位置;通过监测图像采集装置获取的识别图像,判断是否有定位标记图形进入图像采集装置的视野范围;并基于识别结果及获得的定位标记图形的理论坐标信息,确定图像采集装置的预定步进信息;控制图像采集装置以预定步进信息进行步进,实时更新图像采集装置获得的识别图像,并继续判断是否有定位标记图形进入图像采集装置的视野范围;直至识别到定位标记图形的情况下,停止步进;基于各识别图像对应的识别结果,获得各定位标记图形的实际坐标信息,从而准确地对板材进行定位识别。
- 还没有人留言评论。精彩留言会获得点赞!