一种基于高斯曲率和局部凹凸性的改进LCCP点云分割方法
本发明涉及三维点云分割,提供了一种基于高斯曲率和局部凹凸性的改进lccp点云分割方法。
背景技术:
1、目前,3d视觉技术在工业领域中的应用日渐成熟,尤其是深度相机的普及给相关科研带来了更多的机遇和挑战,“拣箱问题”便是其中备受关注的一个。顾名思义,“拣箱问题”要解决的即是如何分拣箱体内杂乱摆放的物体,通常的解决方法是使用深度相机等传感器获取目标的深度图像或点云数据,然后对数据进行处理,最后完成定位和抓取操作。在数据处理阶段点云分割发挥着重要作用,其不仅能够提高识别和定位的准确性,还大大降低了后续计算的复杂度。
2、基于区域生长的点云分割方法是一种简单且有效的点云分割技术。该方法通过将具有相似属性的附近点聚集成不同的区域,实现对点云数据的分割和分类。在该方法中,首先通过选择一个或多个种子点来初始化区域生成过程。然后,对于每个种子点,使用邻域信息将相邻的点加入该区域中。邻域信息可以采用基于欧式距离、基于法向量相似性、基于颜色相似性等不同的度量方式来定义。通过这种方式可以将点云划分成多个具有不同属性的区域,为后续的目标识别和定位提供有效的基础。
3、然而,通常的基于区域生长的点云分割方法在物体相互堆叠的复杂情况下极易产生过分割和欠分割。lccp(locally convex connected patches)算法首先采用超体聚类将点云划分为超体素,再利用局部凹凸性判断相邻超体素是否属于同一物体,该方法对于堆叠物体的分割效果较为理想,但仍然会出现部分超体素跨越物体边界造成欠分割的情况。
技术实现思路
1、针对上述现有技术存在的问题,本发明提出了一种基于高斯曲率和局部凹凸性的改进lccp点云分割方法,主要用于解决复杂环境下分割堆叠物体点云的准确率问题。
2、本发明解决上述技术问题采用的技术方案包括如下步骤:
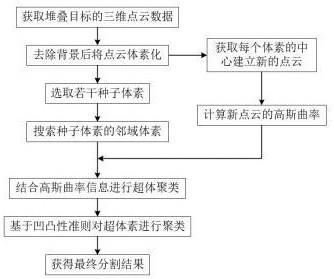
3、步骤1,利用rgb-d相机获取堆叠物体点云数据,去除设定深度以下的背景;
4、步骤2,使用八叉树结构将无序的点云体素化,建立分辨率为的体素空间,获取每个体素的中心点建立新的点云,计算新点云的高斯曲率,以计算得到的每个体素中心点的高斯曲率作为原体素的高斯曲率值;
5、步骤3,将体素空间划分为分辨率为的网格,,选取与网格中心距离最近的体素作为种子体素,搜索种子体素周围一定半径内的体素个数,去除个数少于阈值的噪声体素,再综合颜色、法线、距离和曲率信息进行超体聚类;
6、步骤4,判断相邻超体素块间的凹凸性连接,按照cc准则和sc准则进行聚类,合并凸连接的超体素块,最终获得分割结果。
7、进一步的,步骤1中首先需要测量rgb-d相机与桌面的距离,并采用直通滤波去除该距离以下的背景。
8、进一步的,步骤2中高斯曲率采用基于相邻点法向量的曲率计算方法进行计算,具体步骤如下:
9、(1)对于点云中的每个点,假设点的附近有个近邻点,为点的第个近邻点,的法向量为,建立正交坐标系,表示点的法向量,,,为正交的单位向量。
10、(2)设,,分别为,,,则相对于的法向曲率为:。
11、式中表示向量和之间的夹角,表示向量和之间的夹角;简后的近似值可由下式求出:,
12、式中,。
13、 (3)设为通过点的平面,其法向量为,、为点处的主方向,对应的主曲率为、,为向量和向量间的夹角,为向量和向量间的夹角,其中向量是向量在平面上的投影。
14、根据欧拉公式,法向曲率和主曲率有如下关系:,
15、式中为点过的法截线的切线和主方向的夹角。
16、该式子可以转化为一个优化问题的求解:;
17、令,,对上式进行最小二乘拟合后,可以得出:;
18、主曲率和即为矩阵的特征值。
19、(4)求得高斯曲率。
20、进一步的,步骤3中超体聚类采用流约束聚类方式,具体如下:
21、所有种子体素同时向外生长,根据如下公式计算与相邻体素的相似性距离,吸收距离最近的体素;继续向外搜索,计算下一个邻接体素与聚类中心所有体素的平均相似性距离,吸收距离最近的体素,继续搜索直至所有体素均被吸收。,
22、式中表示种子体素与邻接体素的相似性距离,值越小,表明体素间的特征属性越相近。表示颜色上的差异,代表距离上的差异,表示法向量上的差异,表示高斯曲率上的差异,,,,分别表示对应差异的权重。
23、进一步的,步骤4中cc准则利用下式进行判断:,
24、式中表示两相邻超体素块的连接关系,,,为两相邻超体素块的法向量,为两相邻超体素块的形心连线向量,,,为考虑噪声影响引入的阈值;
25、进一步的,步骤4中sc准则用于判断两超体素块是否为奇异连接,解决cc准则判定错误的情况,判定公式如下:
26、,
27、式中,为两相邻超体素块法向量的向量积,为向量和间的夹角,、和为实验得出的常值,分别取为60°、25°、0.25;
28、凸连接的最终判定公式为:。
29、与现有技术相比,本发明有以下优点:
30、(1)本发明所述方法无需训练任何模型,主要通过点云数据的几何特征实施点云分割,算法鲁棒性强,能有效分割大多数场景下的堆叠物体点云;
31、(2)本发明通过改进原始的lccp算法,在超体聚类时引入高斯曲率信息,增强了对物体边界的识别,使得超体素生长时优先朝更“平坦”的区域进行,有效解决了超体素生长时容易跨越物体边界导致过分割的问题,提高了分割结果的准确性。
技术特征:
1.一种基于高斯曲率和局部凹凸性的改进lccp点云分割方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于高斯曲率和局部凹凸性的改进lccp点云分割方法,其特征在于,步骤1中首先需要测量rgb-d相机与桌面的距离,然后采用直通滤波方法去除该距离以下的背景。
3.根据权利要求1所述的一种基于高斯曲率和局部凹凸性的改进lccp点云分割方法,其特征在于,步骤2中高斯曲率采用基于相邻点法向量的曲率计算方法进行计算,具体步骤如下:
4.根据权利要求1所述的一种基于高斯曲率和局部凹凸性的改进lccp点云分割方法,其特征在于,步骤3中超体聚类采用流约束聚类方式,具体如下:
5.根据权利要求1所述的一种基于高斯曲率和局部凹凸性的改进lccp点云分割方法,其特征在于步骤4中cc准则利用下式进行判断:
技术总结
本发明提供一种基于高斯曲率和局部凹凸性的改进LCCP点云分割方法,涉及三维点云分割技术领域。包括:利用RGB‑D相机获取堆叠物体点云数据,去除背景;将无序点云体素化,建立体素空间,获取每个体素的中心点建立新的点云,计算新点云的高斯曲率,以某点的高斯曲率作为原体素的高斯曲率值;再将体素空间划分为网格,选取与网格中心距离最近的体素作为种子体素,搜索种子体素周围一定半径内的体素个数,去除个数少于阈值的噪声体素,综合颜色、法线、距离和曲率信息进行超体聚类;最后判断相邻超体素块间的凹凸性连接,合并凸连接的超体素块,获得最终分割结果。本发明无需训练任何模型,通过点云数据的几何特征实施点云分割,鲁棒性强。
技术研发人员:金建辉,高显棕
受保护的技术使用者:昆明理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!