一种识别3D物体旋转姿态的方法、系统及可读存储介质与流程
本技术涉及图像识别,尤其涉及一种识别3d物体旋转姿态的方法、系统及可读存储介质。
背景技术:
1、在建筑领域,对3d物体(例如基本的建筑元素如砖块,梁,柱子等)的旋转姿态进行识别,是一项关键的技术。这对于各类应用如建筑信息模型(bim)的建立,建筑维修和翻新都有着重要的实用价值。
2、目前,相关技术中,大多数3d物体姿态识别的技术主要依赖于复杂的计算机视觉技术和深度学习算法。例如,一些方法通过使用深度相机或激光扫描仪收集的数据,训练卷积神经网络(cnn)来识别物体特征,并基于这些特征估计物体的姿态。
3、然而,相关技术中的技术往往需要大量的训练数据和计算资源,它们的使用成本较高且计算过程可能需要更长的时间,不满足实际的使用情况。
技术实现思路
1、本技术提供了一种识别3d物体旋转姿态的方法、系统及可读存储介质,用于减少计算时间、使用成本,满足实际的使用情况。
2、第一方面,本技术提供了一种识别3d物体旋转姿态的方法,包括:
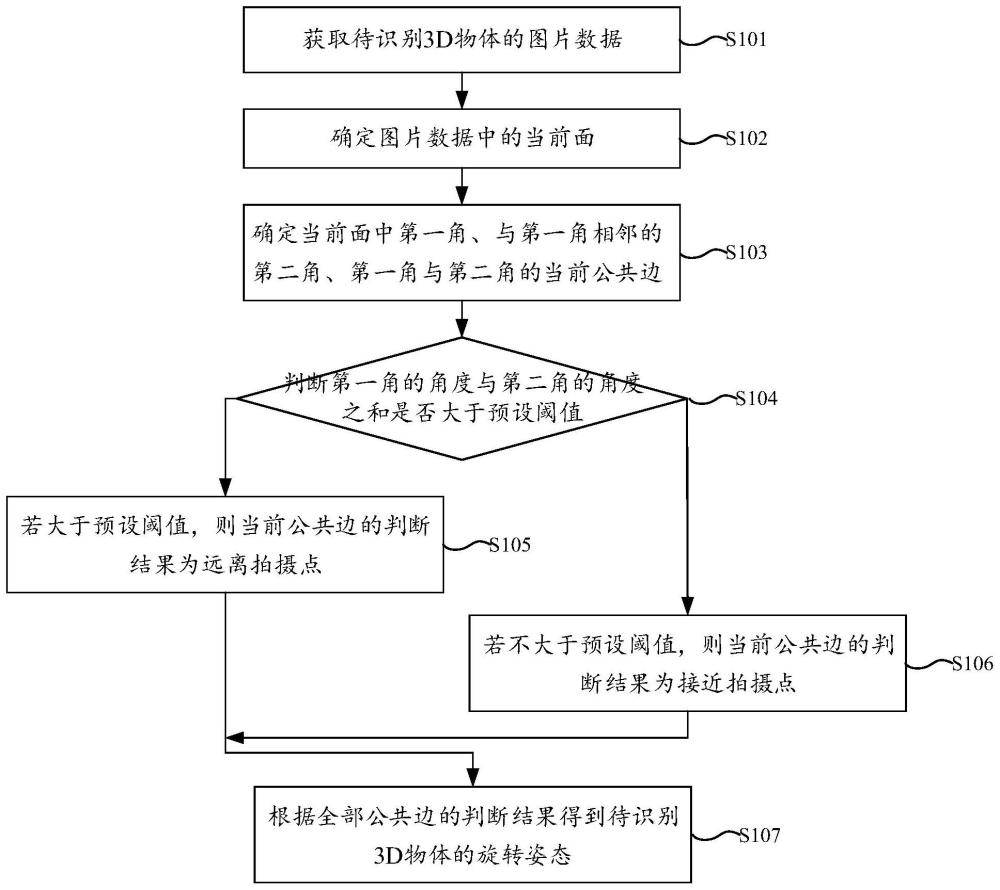
3、获取待识别3d物体的图片数据;
4、确定图片数据中的当前面;
5、确定当前面中第一角、与第一角相邻的第二角、第一角与第二角的当前公共边;
6、判断第一角的角度与第二角的角度之和是否大于预设阈值;
7、若大于预设阈值,则当前公共边的判断结果为远离拍摄点;
8、若不大于预设阈值,则当前公共边的判断结果为接近拍摄点;
9、根据全部公共边的判断结果得到待识别3d物体的旋转姿态。
10、在上述实施例中,通过获取待识别3d物体的图片数据,通过确定图片数据中的当前面,以及当前面中的角度和公共边的判断,能够快速有效地得到待识别3d物体的旋转姿态。该方法避免了依赖大量的训练数据和复杂的计算过程,因此,使用成本更低,计算效率更高。同时,该方法主要依赖于图像数据和几何角度的判断,因此,可以在不需要专门的机器学习或深度学习知识的情况下实施,大大降低了技术应用的门槛。
11、结合第一方面的一些实施例,在一些实施例中,根据全部公共边的判断结果得到待识别3d物体的旋转姿态,具体包括:
12、在当前面中确定与当前公共边连接的第一公共边和第二公共边;
13、根据第一公共边和第二公共边的判断结果确定当前公共边的距离变化趋势;
14、根据全部公共边的判断结果、距离变化趋势得到待识别3d物体的旋转姿态。
15、在上述实施例中,通过确定当前面中与当前公共边连接的第一公共边和第二公共边,以及准确地判断其距离变化趋势,即判断哪一端更接近,哪一端更远离,使得3d物体的旋转姿态识别更具深度和细致度。
16、结合第一方面的一些实施例,在一些实施例中,根据全部公共边的判断结果得到待识别3d物体的旋转姿态之后,方法还包括:
17、确定拍摄点的内参矩阵;
18、确定图片数据中的若干个特征点;
19、根据内参矩阵、特征点的3d坐标和2d坐标建立透视投影方程;
20、计算透视投影方程得到旋转矩阵和平移矩阵;
21、根据旋转矩阵和平移矩阵得到待识别3d物体的状态。
22、在上述实施例中,通过内参矩阵和特征点信息,利用透视投影方程计算出旋转矩阵和平移矩阵,从而确定3d物体的状态。这种方法有效地利用了图像的特征点和内参矩阵,以理论模型为基础,构建了一个透视投影方程,从而实现了对3d物体状态的准确识别和预测。
23、结合第一方面的一些实施例,在一些实施例中,透视投影方程为:
24、
25、式中,[u v 1]为特征点的2d坐标;k为内参矩阵;r为旋转矩阵;t为平移矩阵,[x yz 1]为特征点的3d坐标;s为比例因子。
26、在上述实施例中,通过建立透视投影方程,实现从特征点的2d坐标和3d坐标之间的转换,从而获取旋转矩阵和平移矩阵,进一步确认待识别3d物体的状态。
27、结合第一方面的一些实施例,在一些实施例中,根据内参矩阵、特征点的3d坐标和2d坐标建立透视投影方程之前,方法还包括:
28、图片数据包括第一图片和第二图片,第一图片与第二图片的拍摄点不同;
29、确定第一图片中的第一特征点,确定第二图片中与第一特征点对应的第二特征点;
30、根据第一特征点与第二特征点的位置差异确定第一特征点和第二特征点的3d坐标。
31、在上述实施例中,通过获取不同拍摄点的图片,确定图片中对应的特征点,进而根据这些特征点的位置差异来确定其3d坐标。有效地利用了多视图几何的基本原理,即通过多个视角获取的信息,可以对同一物体的3d信息进行获取。
32、结合第一方面的一些实施例,在一些实施例中,根据第一特征点与第二特征点的位置差异确定第一特征点和第二特征点的3d坐标,具体包括:
33、将第一图片与第二图片对齐,生成视差图;
34、在视差图中确定第一特征点与第二特征点的位置差异;
35、根据预设深度公式将位置差异转化成深度;
36、根据深度将视差图投影到3d空间,得到每一个特征点的3d坐标。
37、在上述实施例中,通过生成视差图,确定特征点的位置差异,并根据预设深度公式将这些差异转化为深度信息,从而获取特征点的3d坐标,因此,能快速的获取特征点的3d坐标。
38、结合第一方面的一些实施例,在一些实施例中,预设深度公式为:
39、
40、式中,z为深度,f为焦距,b为第一图片与第二图片的拍摄点之间的基线距离;d为位置差异。
41、在上述实施例中,利用了立体视觉的基本原理,通过焦距、基线距离以及位置差异计算深度信息,从而实现从2d图像中提取3d信息。
42、第二方面,本技术实施例提供了一种识别3d物体旋转姿态的系统,包括:
43、图片数据模块,用于获取待识别3d物体的图片数据;
44、面确定模块,用于确定图片数据中的当前面;
45、边确定模块,用于确定当前面中第一角、与第一角相邻的第二角、第一角与第二角的当前公共边;
46、判断模块,用于判断第一角的角度与第二角的角度之和是否大于预设阈值;
47、第一执行模块,用于若大于预设阈值,则当前公共边的判断结果为远离拍摄点;
48、第二执行模块,用于若不大于预设阈值,则当前公共边的判断结果为接近拍摄点;
49、姿态模块,用于根据全部公共边的判断结果得到待识别3d物体的旋转姿态。
50、结合第二方面的一些实施例,在一些实施例中,姿态模块具体包括:
51、连接边子模块,用于在当前面中确定与当前公共边连接的第一公共边和第二公共边;
52、变化趋势子模块,用于根据第一公共边和第二公共边的判断结果确定当前公共边的距离变化趋势;
53、状态子模块没有用根据全部公共边的判断结果、距离变化趋势得到待识别3d物体的旋转姿态。
54、结合第二方面的一些实施例,在一些实施例中,系统还包括:
55、内参矩阵模块,用于确定拍摄点的内参矩阵;
56、特征点模块,用于确定图片数据中的若干个特征点;
57、透视投影方程模块,用于根据内参矩阵、特征点的3d坐标和2d坐标建立透视投影方程;计算模块,用于计算透视投影方程得到旋转矩阵和平移矩阵;
58、状态模块,用于根据旋转矩阵和平移矩阵得到待识别3d物体的状态。
59、结合第二方面的一些实施例,在一些实施例中,透视投影方程为:
60、
61、式中,[u v 1]为特征点的2d坐标;k为内参矩阵;r为旋转矩阵;t为平移矩阵,[x yz 1]为特征点的3d坐标;s为比例因子。
62、结合第二方面的一些实施例,在一些实施例中,系统还包括:
63、图片数据包括第一图片和第二图片,第一图片与第二图片的拍摄点不同;
64、特征点确定模块,用于确定第一图片中的第一特征点,确定第二图片中与第一特征点对应的第二特征点;
65、3d坐标模块,用于根据第一特征点与第二特征点的位置差异确定第一特征点和第二特征点的3d坐标。
66、结合第二方面的一些实施例,在一些实施例中,3d坐标模块,具体包括:
67、视差图子模块,用于将第一图片与第二图片对齐,生成视差图;
68、位置差异子模块,用于在视差图中确定第一特征点与第二特征点的位置差异;
69、深度子模块,用于根据预设深度公式将位置差异转化成深度;
70、3d坐标子模块,用于根据深度将视差图投影到3d空间,得到每一个特征点的3d坐标。
71、结合第二方面的一些实施例,在一些实施例中,预设深度公式为:
72、
73、式中,z为深度,f为焦距,b为第一图片与第二图片的拍摄点之间的基线距离;d为位置差异。
74、第三方面,本技术实施例提供了一种识别3d物体旋转姿态的系统,该系统包括:一个或多个处理器和存储器;
75、该存储器与该一个或多个处理器耦合,该存储器用于存储计算机程序代码,该计算机程序代码包括计算机指令,该一个或多个处理器调用该计算机指令以使得该识别3d物体旋转姿态的系统执行如第一方面以及第一方面中任一可能的实现方式描述的方法。
76、第四方面,本技术实施例提供一种包含指令的计算机程序产品,当上述计算机程序产品在服务器上运行时,使得上述服务器执行如第一方面以及第一方面中任一可能的实现方式描述的方法。
77、第五方面,本技术实施例提供一种计算机可读存储介质,包括指令,当上述指令在识别3d物体旋转姿态的系统上运行时,使得上述识别3d物体旋转姿态的系统执行如第一方面以及第一方面中任一可能的实现方式描述的方法。
78、可以理解地,上述第二方面提供的识别3d物体旋转姿态的系统、第三方面提供的识别3d物体旋转姿态的系统、第四方面提供的计算机程序产品和第五方面提供的计算机存储介质均用于执行本技术实施例所提供的识别3d物体旋转姿态的方法。因此,其所能达到的有益效果可参考对应方法中的有益效果,此处不再赘述。
79、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
80、1、本技术提供的识别3d物体旋转姿态的方法,通过获取待识别3d物体的图片数据,通过确定图片数据中的当前面,以及当前面中的角度和公共边的判断,能够快速有效地得到待识别3d物体的旋转姿态。该方法避免了依赖大量的训练数据和复杂的计算过程,因此,使用成本更低,计算效率更高。同时,该方法主要依赖于图像数据和几何角度的判断,因此,可以在不需要专门的机器学习或深度学习知识的情况下实施,大大降低了技术应用的门槛。
81、2、本技术提供的识别3d物体旋转姿态的方法,通过内参矩阵和特征点信息,利用透视投影方程计算出旋转矩阵和平移矩阵,从而确定3d物体的状态。这种方法有效地利用了图像的特征点和内参矩阵,以理论模型为基础,构建了一个透视投影方程,从而实现了对3d物体状态的准确识别和预测。
82、3、本技术提供的识别3d物体旋转姿态的方法,通过获取不同拍摄点的图片,确定图片中对应的特征点,进而根据这些特征点的位置差异来确定其3d坐标。有效地利用了多视图几何的基本原理,即通过多个视角获取的信息,可以对同一物体的3d信息进行获取。
- 还没有人留言评论。精彩留言会获得点赞!