一种基于场桥作业范围的任务指令分配方法与流程
本发明属于码头自动化场桥调度,具体地涉及一种基于场桥作业范围的任务指令分配方法。
背景技术:
1、场桥包括轮胎式龙门起重机(rtg)和轨道式龙门起重机(rmg),是集装箱码头堆场进行装卸、搬运、堆垛作业的专用机械。随着自动化技术的发展,通过在场桥设备上布置多种装置,实现对场桥的工作的远程操控,称之为自动化场桥。集装箱码头的堆场通常被划分为多个块(block),构成了堆场的箱区;在每个箱区内又划分多个贝位(bay),每一贝可以分成多个排(stack),每一排有多个层(tier)。自动化场桥行走在每个堆场块(箱区)中,停止在贝位上,作业该贝位的集装箱指令。
2、在传统技术中,场桥调度多由人工分配指令,不同的人的分配结果不同,场桥指令分配具有不稳定性和不确定性,很难达到合理分配,导致场桥工作效率不高。为适应自动化场桥自动作业的场景,发明专利《场桥调度方法、装置、计算机设备和存储介质》,申请号cn201810055709.x,给出了一种场桥自动寻找最合理的作业指令的问题,它首先在所有指令中寻找该场桥的一个指令子集,再从指令子集中寻找最合适的指令。
3、但是上述方法在寻找指令子集时,采取了“指令与场桥的距离最短”作为划分子集的条件。但是,仅仅“距离最短”这样一个划分条件是并不完整和精确的,因为在实际作业中,由于一块堆场可以同时有多个场桥作业,场桥之间有安全作业的距离要求,场桥也不能跨越另一个场桥作业,场桥也可能处在运动之中,所以一个场桥实际能够作业的指令子集可以运用上面的事实进行进一步压缩。依照上述发明专利中的方法在调度过程中会出现当前场桥被其余场桥阻挡住行动路径而无法执行任务的情况。同时也存在一些关联性任务必须按照一定顺序依次执行,在进行指令分配时也需要考虑到这种情况。
技术实现思路
1、本发明是为了解决上述现有技术存在的问题而提供一种基于场桥作业范围的任务指令分配方法,步骤如下:
2、s1初始化所有任务指令和所有场桥状态;所述任务指令至少包括任务起始位置、任务终止位置、关联任务链标记和关联任务优先级标记,根据关联任务链标记和关联任务优先级标记状态将所有任务指令归入分配指令集合和待分配指令集合;所述场桥状态至少包括场桥当前位置、场桥作业区域最小贝位、场桥作业区域最大贝位和场桥当前状态。
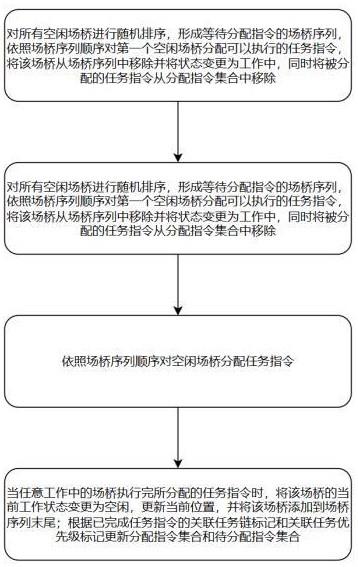
3、s2对所有空闲场桥进行随机排序,形成场桥序列,依照场桥序列顺序对第一个空闲场桥分配可以执行的任务指令,将该场桥从场桥序列中移除并将状态变更为工作中,同时将被分配的任务指令从分配指令集合中移除。
4、s3依照场桥序列顺序对空闲场桥分配任务指令,所述分配任务指令的方法为:
5、s31将场桥序列顺序第一位的空闲场桥指定为当前空闲场桥,将分配指令集合中任务起始位置和任务终止位置均落在当前空闲场桥的作业区域内的作业指令添加进待筛选指令子集;
6、s32对待筛选指令子集进行进一步筛选,所述进一步筛选的方法为判断当前空闲场桥执行任务指令的作业范围是否与工作中的场桥的作业范围存在重合区域,若存在则将该任务指令从对待筛选指令子集中移除;
7、s33经过s32进一步筛选后,若待筛选指令子集不为空,则依照指令分配原则将最优指令分配给当前空闲场桥;若待筛选指令子集为空,则将当前空闲场桥移至场桥序列末尾,并对场桥序列中下一个空闲场桥重复步骤s31;
8、s34将步骤s33中被分配的任务指令从分配指令集合中移除,将已分配好任务指令的场桥的当前状态变更为工作中,并将该场桥从场桥序列中移除,将场桥序列顺序下一位的空闲场桥指定为当前空闲场桥后重复s31。
9、s4当任意工作中的场桥执行完所分配的任务指令时,将该场桥的当前工作状态变更为空闲,更新当前位置,并将该场桥添加到场桥序列末尾;根据已完成任务指令的关联任务链标记和关联任务优先级标记更新分配指令集合和待分配指令集合。
10、进一步地,步骤s1中所述任务指令的关联任务链标记和关联任务优先级标记具体为:
11、将具有严格执行顺序的多个相关联的任务指令设定为相同的关联任务链标记,关联任务优先级为该任务指令在执行顺序中的位置,仅执行顺序中最先的任务指令被归入分配指令集合,其余关联任务被归入待分配指令集合。
12、进一步地,步骤s2中所述对第一个空闲场桥分配可以执行的任务指令,具体为:
13、筛选出分配指令集合中任务起始位置和任务终止位置均落在第一个空闲场桥作业区域内的任务指令,依照指令分配原则将最优指令分配给第一个空闲场桥。
14、进一步地,步骤s2和s33中指令分配原则为:根据执行参数生成对应指令的执行分数,根据执行分数分配任务指令。
15、进一步地,所述执行参数包括任务指令类型、场桥执行任务指令所需时间、场桥执行任务指令所需移动的距离、任务指令让集卡等待的时间,所述执行分数由所述各执行参数归一化后加权相加获得。
16、进一步地,所述场桥当前状态分为空闲和工作中,场桥当前状态为工作中时进一步分为正在前往任务起始位置、正在前往任务终止位置、已抵达任务终止位置。
17、进一步地,步骤s32中:
18、所述当前空闲场桥执行任务指令的作业范围为当前空闲场桥当前位置、任务起始位置、任务终止位置三点所覆盖的最大范围;
19、所述工作中的场桥的作业范围根据工作中的场桥的当前状态为:
20、当场桥当前状态为正在前往任务起始位置时,工作中的场桥的作业范围为该场桥当前位置、任务起始位置、任务终止位置三点所覆盖的最大范围;
21、当场桥当前状态为正在前往任务终止位置时,工作中的场桥的作业范围为任务起始位置至任务终止位置所覆盖的范围;
22、当场桥当前状态为已抵达任务终止位置时,工作中的场桥的作业范围为任务终止位置点上。
23、进一步地,设定场桥作业的安全距离,则步骤s32中:
24、所述当前空闲场桥执行任务指令的作业范围为空闲场桥当前位置、任务起始位置、任务终止位置三点所覆盖的最大范围且两端分别延伸安全距离的一半;
25、当场桥当前状态为正在前往任务终止位置时,工作中的场桥的作业范围为任务起始位置至任务终止位置所覆盖的范围且两端分别延伸安全距离的一半;
26、当场桥当前状态为已抵达任务终止位置时,工作中的场桥的作业范围为任务终止位置点两侧延伸安全距离的一半。
27、进一步地,步骤s33中设置最大跳过数,当连续出现待筛选指令子集为空的次数达到最大跳过数时,中断s33等待任意一个工作中的场桥完成任务指令并转为空闲场桥后,对所有空闲场桥重新随机排序并生成新的场桥序列后,执行s31。
28、本发明具有如下有益效果:
29、通过对任务指令初始化,将具有关联性的多个任务进行排序并标记,除排序处在第一位的关联性任务外,其余任务暂时不参与场桥的指令分配,待第一位的关联性任务指令处理完成后,其余任务再依顺序依次进入分配指令集合,从而完成关联性任务指令的分配。
30、在任务指令分配时,在对空闲场桥分配任务指令时,考虑场桥执行指令时的作业范围是否与正在工作的其他场桥作业范围重合,当存在重合区域时判定该指令不能执行,从而避免出现场桥执行指令需要跨越其他场桥的情况;在判定场桥作业范围时,还考虑了场桥间的安全作业距离,降低场桥触碰可能发生的意外事故。在计算执行分数前,通过上述方法先剔除无效指令,减少计算量,在合理分配任务指令的同时提高任务指令的分配效率。
31、通过对所有空闲场桥进行随机排序,避免个别场桥持续工作而其余场桥始终处于空闲的状态;同时设置最大跳过数,当连续出现指令无法分配的情况时,对所有空闲场桥重新排序,避免个别场桥始终分配不到可执行指令。
- 还没有人留言评论。精彩留言会获得点赞!