基于点云识别的输电铁塔异常状态报警方法、系统及设备与流程
本发明属于输电铁塔检测,具体涉及一种基于点云识别的输电铁塔异常状态报警方法、系统及设备。
背景技术:
1、输电线路运行环境多样,随着运行年限的变长,以及遭受气象灾害等因素的影响,线路沿线的输电铁塔可能发生腐蚀、螺栓松动、基础滑移等劣化,当铁塔发生不可逆转的塑形形变后,往往会出现较大的形变,威胁着输电线路的结构安全。因此,对输电铁塔进行形变预警具有重要的工程应用价值。输电铁塔通常有几十米到上百米高,而且存在高压无法停电作业,人工测量难度较大,利用无人机扫描输电铁塔的点云数据,通过关键状态量来判断输电铁塔形变已超过允许范围并预警,可以快速有效的排查输电线路的隐患。
2、“点云”是通过测量仪器获得设备外观表面的点数值集合,主要包括三维坐标、颜色、强度值等参数。通过无人机搭载“激光雷达”进行飞行扫描,从而将输电线路铁塔、导地线、走廊通道以及周边地理环境形成三维点云数据,可以清楚地观察到物体的空间位置,也可以确定导地线与参考平面的距离大小。利用采集的激光点云数据建立输电通道三维模型,可以进行无人机精细化自主巡检、交跨距离测量、弧垂测量、风偏等计算分析应用。
3、地面三维激光扫描技术能够快速获取输电铁塔表面数据,然而,由于地形的限制,容易出现数据盲区。无人机倾斜摄影测量具有高机动性、灵活性和安全性的优点,低空作业可以获得高分辨率的图像,并且采集周期短、效率高,能够方便快速的获取各种输电铁塔及地形数据,但受控制点和航高等因素影响,得到的输电铁塔数据精度较低。同时,点云数据中往往会出现噪点,噪点通常是指那些无意义、不规则的点,它们可能由于传感器的错误测量、环境的干扰等因素造成。在处理点云数据时,需要将这些噪点去除,以提高数据质量和后续处理效果。此外,在计算机视觉和模式识别中,轮廓是识别物体的重要特征之一。由于点云数据是无结构的数据,如何快速判断哪些点落在物体轮廓上是获取轮廓线的首要问题。在获得点云数据之后如何提取物体的轮廓线,一直是计算机图形学研究的热点问题之一,利用点云数据进行轮廓线识别通常需要人工辅助,轮廓线识别的准确度影响状态判别的准确性。
技术实现思路
1、本发明的目的在于针对上述现有技术中的问题,提供一种基于点云识别的输电铁塔异常状态报警方法、系统及设备,根据输电铁塔特征对采集到的点云数据进行修正,利用修正的轮廓线通过识别指定状态量判断输电铁塔异常状态并报警,能够实现更准确的提取到输电铁塔变形状态量,提高输电铁塔异常状态报警的准确性。
2、为了实现上述目的,本发明有如下的技术方案:
3、第一方面,提供一种基于点云识别的输电铁塔异常状态报警方法,包括:
4、采集输电铁塔的点云数据;
5、考虑输电铁塔结构对称的特点对点云数据进行修正,得到修正后的塔身轴线、横担轴线;
6、通过修正后的塔身轴线、横担轴线提取输电铁塔的状态量;
7、获取输电铁塔的环境参数,计算出输电铁塔的状态量理论变形阈值;
8、将输电铁塔的状态量与状态量理论变形阈值进行比较,当输电铁塔的状态量超过状态量理论变形阈值时,进行输电铁塔异常状态报警。
9、作为一种优选的方案,所述采集输电铁塔的点云数据的步骤通过移动设备对输电铁塔进行激光采集。
10、作为一种优选的方案,所述考虑输电铁塔结构对称的特点对点云数据进行修正,得到修正后的塔身轴线、横担轴线的步骤包括:确定任意铁塔坐标系(x0,y0,z0),分别绕x轴、y轴、z轴旋转n1次,每次旋转的角度为2πi/n1,x轴旋转i次、y轴旋转j次、z轴旋转k次后的坐标系为(xi,yj,zk);
11、沿x轴移动坐标轴dx50,使得x<0的点云数量与x>0的点云数量相等,即nx<0=nx>0,此时坐标系为(xi+dx50,yj,zk);
12、取dz25,使得
13、取dz50,使得
14、取dz75,使得
15、令dz′=(dz75-dz25)/10,分别截取点云块范围a1:[dz25-dz′,dz25+dz′]、a2:[dz50-dz′,dz50+dz′]、a3:[dz75-dz′,dz75+dz′];
16、当坐标系为(xi1+dx50,yj1,zk1)时,若a1、a2、a3任一截取点云块在xoy平面的投影约等于正方形,将坐标轴y轴0点移至正方形形心处,新坐标系为(xi1+dx50,yj1+dy0,zk1)。
17、作为一种优选的方案,所述通过修正后的塔身轴线、横担轴线提取输电铁塔的状态量的步骤包括:
18、取点云在xoz平面的投影包络面积为axoz,在yoz平面的投影包络面积为ayoz,令正侧投影面积比例为k0=axoz/ayoz,将坐标轴绕z轴旋转n2次,每次旋转的角度为2πi/n2,计算每次的正侧投影面积比例,取
19、正侧投影面积比例最大时,计算axoz的x坐标范围[x]、z坐标范围[z]及ayoz的y坐标范围[y],若[z]>[x]>[y],按高度将铁塔点云切成nc段,铁塔高度为h0,塔头高度为h1,每个塔段高度d1=h0/nc,塔头部分个数为nt=h1*nc/h0,取局部坐标系为c0=cm;
20、设定去噪阈值,对应的查找nr1(x<xr1)=r1nall,nr1为点云中x<xr1的点云个数,nall为点云总个数,同理查找nr2(x<xr2)=r2nall,判别斜率为kc0=xr2-xr1;
21、将局部坐标系基于y轴旋转n3次,第n次旋转角度为0.5πn/n3,每次在局部坐标系下计算判别斜率kcn,取n=l时对应的局部坐标系(xl,yl,zl)按阈值r1偏移后的局部坐标系(xl-xr1,yl,zl)为塔段左侧轮廓坐标系,局部坐标系的yoz平面为塔段左侧轮廓面;同理,求得塔段右侧轮廓面、塔段前侧轮廓面及塔段后侧轮廓面。
22、作为一种优选的方案,所述获取输电铁塔的环境参数,计算出输电铁塔的状态量理论变形阈值的步骤包括:
23、以轮廓面的交线为塔段轮廓线,轮廓面与上顶面相交形成的四边形的形心和与下顶面相交形成的四边形的形心连线为中心轴线,计算中心轴线与cm的z轴夹角α表征此塔段的倾斜变形状态,铁塔所有塔段的夹角平均为杆塔倾斜的定量表示;
24、以塔头前侧轮廓面、后侧轮廓面与上顶面相交形成的四边形的左、右侧边中点连线为塔头水平中心轴线,计算塔头水平中心轴线与cm的x轴夹角α表征此塔段的扭转变形状态,夹角平均为横担扭转的定量表示;
25、根据输电铁塔的环境参数求得最大理论变形值
26、作为一种优选的方案,所述输电铁塔的状态量包括输电铁塔的倾斜与横担扭转,考虑点云精度造成的误差为α*,则杆塔倾斜的理论变形阈值为横担扭转的理论变形阈值为
27、所述输电铁塔的环境参数包括风速、冰厚。
28、作为一种优选的方案,所述将输电铁塔的状态量与状态量理论变形阈值进行比较,当输电铁塔的状态量超过状态量理论变形阈值时,进行输电铁塔异常状态报警的步骤,当杆塔倾斜的定量表示或横担扭转的定量表示时,进行输电铁塔异常状态报警。
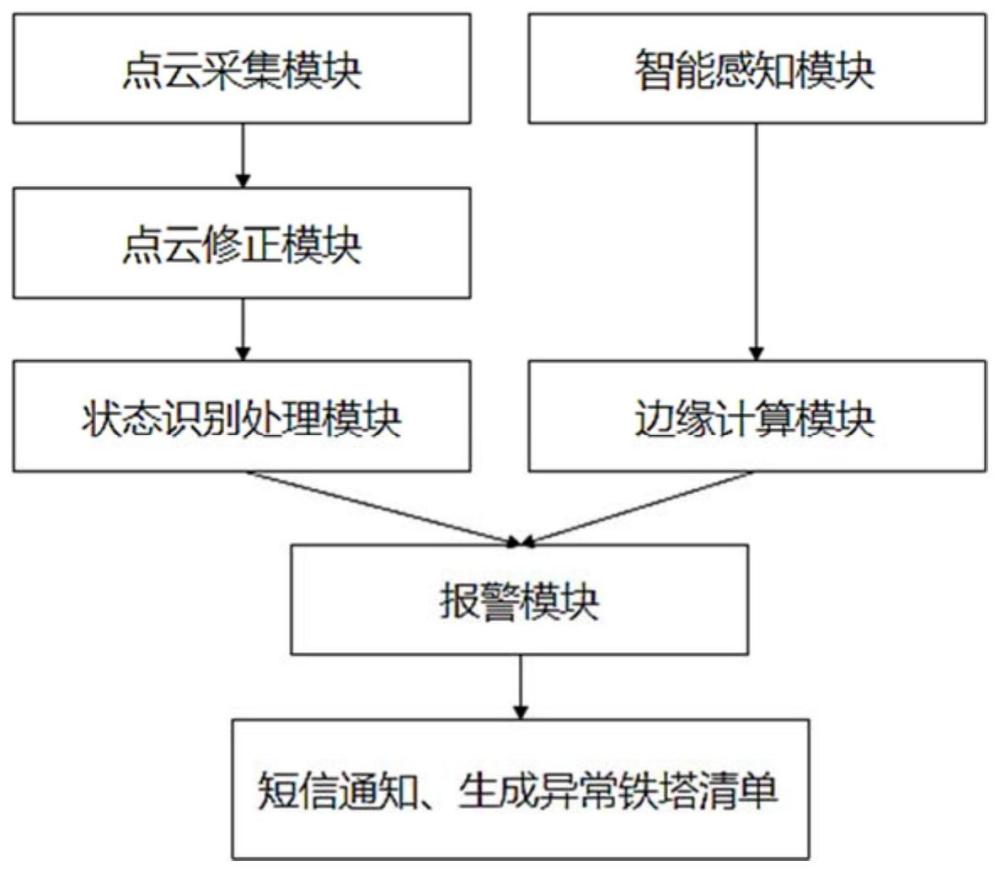
29、作为一种优选的方案,所述进行输电铁塔异常状态报警的步骤,通过短信通知或生成异常铁塔清单的方式进行报警。
30、第二方面,提供一种基于点云识别的输电铁塔异常状态报警系统,包括:
31、点云采集模块,用于采集输电铁塔的点云数据;
32、点云修正模块,用于考虑输电铁塔结构对称的特点对点云数据进行修正,得到修正后的塔身轴线、横担轴线;
33、状态识别处理模块,用于通过修正后的塔身轴线、横担轴线提取输电铁塔的状态量;
34、智能感知及边缘计算模块,用于获取输电铁塔的环境参数,计算出输电铁塔的状态量理论变形阈值;
35、报警模块,用于将输电铁塔的状态量与状态量理论变形阈值进行比较,当输电铁塔的状态量超过状态量理论变形阈值时,进行输电铁塔异常状态报警。
36、作为一种优选的方案,所述点云修正模块确定任意铁塔坐标系(x0,y0,z0),分别绕x轴、y轴、z轴旋转n1次,每次旋转的角度为2πi/n1,x轴旋转i次、y轴旋转j次、z轴旋转k次后的坐标系为(xi,yj,zk);
37、沿x轴移动坐标轴dx50,使得x<0的点云数量与x>0的点云数量相等,即nx<0=nx>0,此时坐标系为(xi+dx50,yj,zk);
38、取dz25,使得
39、取dz50,使得
40、取dz75,使得
41、令dz′=(dz75-dz25)/10,分别截取点云块范围a1:[dz25-dz′,dz25+dz′]、a2:[dz50-dz′,dz50+dz′]、a3:[dz75-dz′,dz75+dz′];
42、当坐标系为(xi1+dx50,yj1,zk1)时,若a1、a2、a3任一截取点云块在xoy平面的投影约等于正方形,将坐标轴y轴0点移至正方形形心处,新坐标系为(xi1+dx50,yj1+dy0,zk1)。
43、作为一种优选的方案,所述状态识别处理模块取点云在xoz平面的投影包络面积为axoz,在yoz平面的投影包络面积为ayoz,令正侧投影面积比例为k0=axoz/ayoz,将坐标轴绕z轴旋转n2次,每次旋转的角度为2πi/n2,计算每次的正侧投影面积比例,取
44、正侧投影面积比例最大时,计算axoz的x坐标范围[x]、z坐标范围[z]及ayoz的y坐标范围[y],若[z]>[x]>[y],按高度将铁塔点云切成nc段,铁塔高度为h0,塔头高度为h1,每个塔段高度d1=h0/nc,塔头部分个数为nt=h1*nc/h0,取局部坐标系为c0=cm;
45、设定去噪阈值,对应的查找nr1(x<xr1)=r1nall,nr1为点云中x<xr1的点云个数,nall为点云总个数,同理查找nr2(x<xr2)=r2nall,判别斜率为kc0=xr2-xr1;
46、将局部坐标系基于y轴旋转n3次,第n次旋转角度为0.5πn/n3,每次在局部坐标系下计算判别斜率kcn,取n=l时对应的局部坐标系(xl,yl,zl)按阈值r1偏移后的局部坐标系(xl-xr1,yl,zl)为塔段左侧轮廓坐标系,局部坐标系的yoz平面为塔段左侧轮廓面;同理,求得塔段右侧轮廓面、塔段前侧轮廓面及塔段后侧轮廓面。
47、作为一种优选的方案,所述智能感知及边缘计算模块通过智能感知获取输电铁塔的环境参数,通过边缘计算得到输电铁塔的状态量理论变形阈值;所述智能感知及边缘计算模块以轮廓面的交线为塔段轮廓线,轮廓面与上顶面相交形成的四边形的形心和与下顶面相交形成的四边形的形心连线为中心轴线,计算中心轴线与cm的z轴夹角α表征此塔段的倾斜变形状态,铁塔所有塔段的夹角平均为杆塔倾斜的定量表示;
48、以塔头前侧轮廓面、后侧轮廓面与上顶面相交形成的四边形的左、右侧边中点连线为塔头水平中心轴线,计算塔头水平中心轴线与cm的x轴夹角α表征此塔段的扭转变形状态,夹角平均为横担扭转的定量表示;
49、根据输电铁塔的环境参数求得最大理论变形值考虑点云精度造成的误差为α*,则杆塔倾斜的理论变形阈值为横担扭转的理论变形阈值为
50、第三方面,提供一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述的处理器执行所述的计算机程序时实现所述基于点云识别的输电铁塔异常状态报警方法。
51、第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述的计算机程序被处理器执行时实现所述基于点云识别的输电铁塔异常状态报警方法。
52、相较于现有技术,本发明第一方面至少具有如下的有益效果:
53、由于输电铁塔是一个前后对称、塔身部分左右对称的高度对称结构,本发明考虑输电铁塔结构对称的特点对采集到的点云数据进行修正,在由点云提取信息到铁塔物理状态量表征的过程中,本发明通过修正后的塔身轴线、横担轴线提取输电铁塔的状态量,可以更准确的获得需要提取的输电铁塔变形状态量,本发明将输电铁塔的状态量与状态量理论变形阈值进行比较,当输电铁塔的状态量超过状态量理论变形阈值时,进行输电铁塔异常状态报警,通过识别指定状态量判断输电铁塔异常状态,提高了异常状态报警的准确性。
54、进一步的,本发明通过修正后的塔身轴线、横担轴线提取输电铁塔的状态量,以及计算出输电铁塔的状态量理论变形阈值的步骤中,提出了对点云轮廓及中心轴线具体确定的计算方法,解决了点云噪点的问题和轮廓线识别需要人工辅助的问题。
55、可以理解的是,上述第二方面至第四方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!