一种小尺寸轴承的视觉检测方法
本发明涉及轴承检测,具体涉及一种小尺寸轴承的视觉检测方法。
背景技术:
1、随着科技的发展,各类精密小尺寸轴承的应用日益广泛,如用于精密仪器、医疗设备、航空航天等领域。但传统的轴承检测方法存在一定局限性。具体来说,对于小尺寸杆端关节轴承等小尺寸轴承而言,其结构尺寸小,表面特征信息相对较少,同时不同批次轴承的公差存在一定差异,使得轴承滑动球面具有较高的可变性。这给自动化轴承检测带来了困难。因此,在密集混乱的小尺寸轴承自动化堆叠生产线上,常见的检测方法,如机器视觉法,往往难以提取区别特征,导致轴承检测的准确性较低,间接降低了生产效率。
技术实现思路
1、本发明的目的在于提供一种小尺寸轴承的视觉检测方法,该方法有利于提高对小尺寸轴承的检测精度和检测速度。
2、为了实现上述目的,本发明采用的技术方案是:一种小尺寸轴承的视觉检测方法,包括以下步骤:
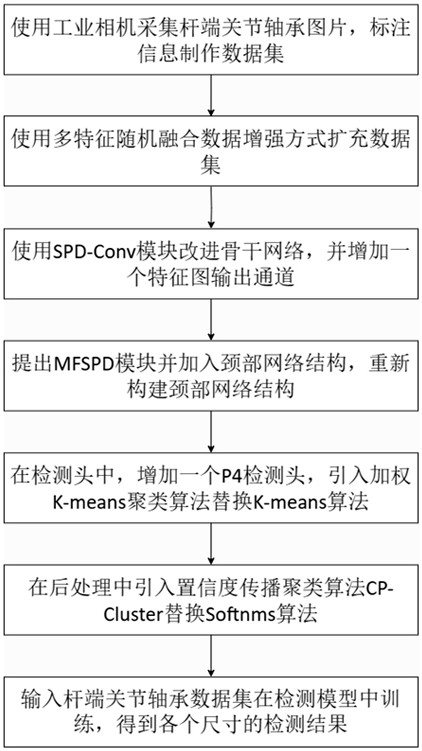
3、s1、获取不同尺寸、不同批次的杆端关节轴承图片,标注信息制作成杆端关节轴承数据集;
4、s2、通过多特征随机融合数据增强方式扩充杆端关节轴承数据集;
5、s3、改进yolov5算法模型,包括:
6、s31、使用spd-conv模块改进骨干网络,并增加一个特征图输出通道;
7、s32、在颈部网络加入多层融合模块mfspd,重新构建颈部网络;
8、s33、在检测头中增加一个p4检测头,引入加权k-means聚类算法替换原k-means算法以生成更优先验框;
9、s34、在后处理中引入置信度传播聚类算法cp-cluster替代softnms算法,优化预测框置信度与检测速度;
10、通过杆端关节轴承数据集对改进的yolov5算法模型进行训练,得到训练好的检测模型;
11、s4、将待检测图像输入训练好的检测模型进行轴承检测与分类,自动识别各个尺寸与型号的杆端关节轴承。
12、进一步地,步骤s2中,通过多特征随机融合数据增强方式扩充杆端关节轴承数据集,包括:模糊,调整亮度,裁剪,旋转,平移,镜像,裁剪,缩放、噪声添加,颜色变化。
13、进一步地,步骤s3中,基于yolov5s网络模型进行改进,得到改进的yolov5s网络模型。
14、进一步地,步骤s3 1中,spd-conv模块由一个空间转深度层和一个无步长卷积层组成;其中空间转深度层按如下方式进行图像处理:
15、f0,0=x[0:l:k,0:l:k],f1,0=x[1:l:k,0:l:k],…,
16、fk-1,0=x[k-1:l:k,0:l:k];
17、f0,1=x[0:l:k,1:l:k],f1,1,…,
18、fk-1,1=x[k-1:l:k,1:l:k];
19、
20、f0,k-1=x[0:l:k,k-1:l:k],f1,k-1,…,
21、fk-1,k-1=x[k-1:l:k,k-1:l:k] (1)
22、给定任一初始特征图x,将x(i,j)通过i+x和j+y按k大小整除得到子特征图fx,y;每个子特征图按比例因子对x进行下采样;
23、在空间转深度层后,使用一个带有c2过滤器的无步长卷积层,将k2c1转为c2,其中c2<k2c1,以尽可能保留所有有用的特征信息;
24、骨干网络基于cspdarknet53改进后增加一个160x160x128的特征图输出,用于后续检测小尺寸目标;并将步长为2的所有卷积层替换为spd-conv模块;改进后结构输出4个尺度分别为160x160x128、80x80x256、40x40x512和20x20x1024的特征图,然后输入颈部网络中进行下一步强化融合。
25、进一步地,步骤s32中,基于spd模块,构建多层融合模块mfspd;mfspd模块使用spd结构,从不同网络层进行特征提取,获得多尺度特征;mfspd模块采用连续的压缩-激活操作增强特征;mfspd模块使用加权残差连接,使得底层语义信息可以更好保留传递至模型顶层;通过卷积核为3,步长为2的卷积对输入数据进行卷积计算,然后与spd层进行add特征融合:
26、
27、然后经过卷积核为3,步长为1的卷积层,输出特征图与上一步步长为2的卷积层输出通过concat特征融合:
28、
29、conv层由conv2d卷积、bn归一化和silu激活函数组成,其中silu函数的公式为:
30、
31、进一步地,步骤s33中,在检测头中增加一个p4检测头,增加p4检测头后,不同尺度的检测头可对不同大小的杆端关节轴承进行多尺度检测;
32、在原k-means算法上使用加权k-means算法,给每个样本带上权重系数;采用聚类中心与样本之间的最大交并比来评价聚类结果;具体包括:
33、按需选取k个聚类中心;
34、求取每一个样本到feature map中心点之间的距离dic,计算公式如下:
35、
36、其中,xi,yi为第i个样本横、纵坐标,为第c个中心横、纵坐标;
37、求取每个样本对应其聚类中心的权重,并构造权重矩阵,式(6)为所有样本到任一中心点a距离的均值,式(7)为权重计算公式:
38、
39、
40、其中,wijc为第i个样本与第j个聚类中心的权重,c为聚类中心对应的feature map中心点;
41、更新目标函数d,即更新聚类中心:
42、
43、其中,bi为i样本标注框的宽高,cj为第j个聚类中心预选框;
44、循环迭代更新所有聚类中心,直到聚类中心位置不再改变。
45、进一步地,步骤s34中,在后处理中,引入置信度传播聚类算法cp-cluster作为后处理模块;具体实现方法为:
46、先将所有候选框转为无向图集合,然后在图中每个候选框相互传递正面消息与负面消息;落选的候选框被消除的同时,被选出的候选框置信度也被加强了;
47、正面消息传递中,将置信度比自身低,iou高于一个设定超参数阈值判断为弱势朋友聚类,通过弱势朋友的数量以及置信度更新强侧置信度,如式(9):
48、
49、其中wbi为弱势朋友的集合,p为置信度;
50、负面消息传播中,将原来由高到低的排序改成图结构,省去排序,并且抑制两次;另外,加入sup矩阵,防止一个预测框被反复被同一个预测框抑制;式(10)通过最强朋友进行抑制,式(11)为更新弱侧置信度;
51、
52、
53、迭代循环,使算法收敛到最优解,最后过滤置信度低的预测框,只留下置信度最高的预测框。
54、进一步地,步骤s4中,通过训练好的检测模型对杆端关节轴承图像进行预测,其具体方法为:
55、首先,图像数据输入到模型的骨干网络中,经过多层特征提取,获得语义丰富的特征映射;然后,不同尺度的检测头对特征图进行解析,得到不同大小目标的预测框;而后,模型对每个预测框进行分类,判断其包含的目标类别;接着,后处理模块微调预测框及其置信度;最后,根据置信度阈值,筛选出满足要求的预测框,输出检测结果;其中,高置信度框对应检测到的轴承目标。
56、与现有技术相比,本发明具有以下有益效果:提供了一种小尺寸轴承的视觉检测方法,该方法对yolov5算法模型进行改进重建,重建后的算法模型明显增强了特征提取能力与检测精度,并且实时性与精确性皆满足检测要求;相较于主流检测网络,同等检测精度下,本方法需要更少的计算量与参数,大大节约了计算成本与内存空间。
- 还没有人留言评论。精彩留言会获得点赞!