一种基于卷积双层粒子滤波的滑坡块体运动状态的预测方法、系统、装置及介质与流程
本发明属于滑坡监测,尤其是涉及一种基于卷积双层粒子滤波的滑坡块体运动状态的预测方法、系统、装置及介质。
背景技术:
1、早期的技术采用变系数回归模型,对滑坡降雨库水等诱发因素进行分析,并使用时间序列分析和双向长短期记忆模型分析了降雨、库水等外界因素对三峡库区白水河滑坡位移的影响。然而,斜坡在启滑前的运动情况复杂,只考虑单一监测点无法准确有效的预测滑体的运动状态。近年来,基于流向的滑坡边界划分方法通过数字地形模型处理的流向图对滑坡边界进行划分,根据滑坡样本特征与相关环境因素,利用半监督多层感知机将滑坡划分为若干个敏感区,用于滑坡易感性预测。但是,这些方法主要集中在边界划分和易感性分区中,提升了滑坡易发性评价结果的准确性,未对划分的区域进行运动状态分析。
技术实现思路
1、本发明第一个目的在于,提供一种基于卷积双层粒子滤波的滑坡块体运动状态的预测方法。
2、为此,本发明的上述目的通过如下技术方案实现:
3、一种基于卷积双层粒子滤波的滑坡块体运动状态的预测方法,其特征在于:所述方法包括如下步骤:
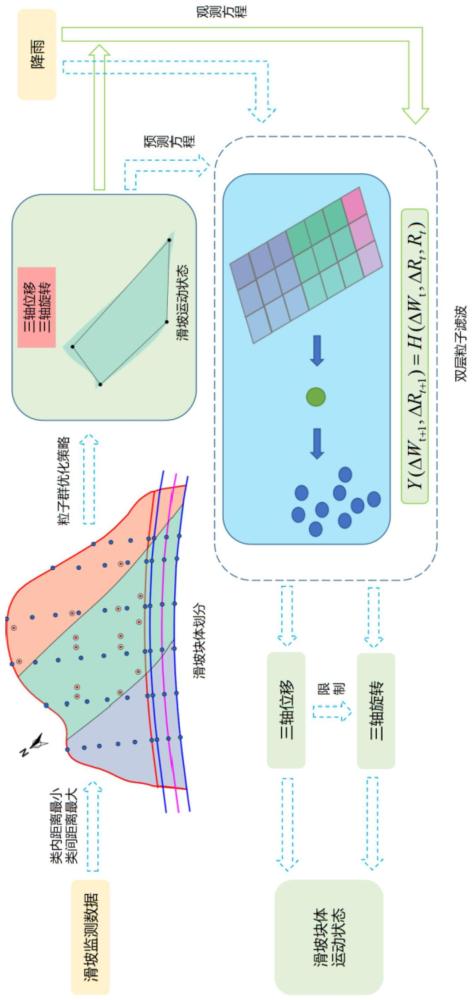
4、s1、滑坡块体划分
5、基于滑坡监测数据,根据滑坡不同块体在同一时刻运动趋势不同,使用聚类思想对滑坡块体进行划分,整合划分后块体内多个监测点信息;
6、s2、滑坡块体运动状态表达
7、通过粒子群优化策略寻找滑坡块体运动轨迹的全局最优解,将同一滑坡块体不同监测点的监测数据转换为滑坡块体的六自由度,滑坡块体的六自由度分别为滑坡块体的三轴位移和三轴旋转;
8、s3、滑坡运动状态预测
9、以滑坡的主要诱发因素月降雨量和滑坡块体上月的六自由度为输入,使用拟合函数构建观测方程,使用卷积神经网络构建预测方程,来分析滑坡块体当前时刻的运动情况。
10、在采用上述技术方案的同时,本发明还可以采用或者组合采用如下技术方案:
11、作为本发明的一种优选技术方案:步骤s1中,聚类思想的规则为:类内距离最小,类间距离最大。
12、作为本发明的一种优选技术方案:步骤s1中,t时刻两个监测点a和b之间的距离定义如下:
13、sabt=α||wat-wbt||+β(vat-vbt)+dab
14、
15、
16、上式中:waxt、wayt、wazt为t时刻a监测点x轴南北向、y轴东西向、z轴竖向高程累计位移;wbxt、wbyt、wbzt为t时刻b监测点x轴南北向、y轴东西向、z轴竖向高程累计位移;vat、vbt为t时刻a监测点、b监测点的速度,α为距离系数,β速度系数,dab为a、b监测点的空间位置关系。
17、作为本发明的一种优选技术方案:步骤s2具体过程如下:
18、通过粒子群优化策略寻找滑坡块体运动轨迹的全局最优解,将同一滑坡块体不同监测点的监测数据转换为滑坡块体的六自由度,滑坡块体全局最优解定义如下:
19、
20、上式中:△w表示三轴位移,△r表示三轴旋转,wit表示同一块体中第i个监测点t时刻三轴坐标向量;wit表示同一块体中第i个监测点t-1时刻三轴坐标向量,d集合包含块体所有监测点监测数据;
21、粒子群优化策略如下:
22、vk+1=ωvk+c1×rand×(pid-xk)+c1×rand×(pgd-xk)
23、xk+1=xk+vk+1
24、上式中:vk+1为更新六自由度的向量;xk为当前粒子所代表的六自由度;xk+1为下一次迭代后粒子所代表的六自由度;ω为惯性权重;c1、c2为学习因子;pid为个体最优六自由度;pgd为种群最优六自由度;
25、使用最大误差率表示粒子群优化策略的精确程度,最大误差率定义如下:
26、
27、上式中:wit表示同一块体中第i个监测点t时刻三轴坐标向量,△w表示三轴位移,△r表示三轴旋转。
28、作为本发明的一种优选技术方案:步骤s3具体过程如下:
29、s31、观测方程的构建:
30、使用拟合函数构建观测方程,定义如下:
31、y(δwt+1,δrt+1)=h(δwt,δrt,rt)
32、上式中:y表示滑坡块体的观测六自由度;t为时间;h为构建观测方程的拟合函数;△w表示三轴位移;△r表示三轴旋转;r为降雨因素;
33、s32、预测方程的构建:
34、为减少不同特征间的相互影响,将输入数据打平后输入至卷积神经网络,卷积神经网络的结构主要由卷积、池化、全连接3种结构组成;卷积层主要负责提取输入数据特征,考虑到本发明中输入数据的特殊性,卷积核大小为1*3,再使用非线性函数relu作为激活函数对提取的特征进行映射;为充分提取数据特征,卷积核个数为16;池化层主要负责保持数据特征的同时,对数据进行采样降维,池化层大小为1*2,采用最大值池化;全连接层一般位于网络末端,用于特征合并,合并的特征送入回归层并加入白噪声,生成n个预测粒子;
35、s33、基于双层粒子滤波的算法实施步骤主要包括初始化、重要性采样、重采样;
36、1)、初始化:
37、预测开始前,由先验概率分布p(x0)生成两层粒子,第一层三轴平移粒子负责控制滑坡块体的平移运动,总数为n1,单个粒子的初始权重为1/n1;第二层三轴旋转粒子负责控制滑坡块体的旋转运动,总数为n2,单个粒子的初始权重为1/n2;
38、2)、重要性采样:
39、开始预测时,首先采用高斯概率密度函数计算每个三轴平移粒子的权重,并对该权重进行归一化处理,计算过程如下:
40、
41、
42、
43、上式中:errw表示三轴位移的观测误差;为t时刻第i个三轴位移粒子的权重;ew为三轴位移观测噪声;wzt为t时刻位移的观测值;wxti为t时刻第i个粒子表示的三轴位移;
44、然后采用高斯概率密度函数计算每个三轴旋转粒子的权重,并对该权重进行归一化处理,计算过程如下:
45、
46、
47、
48、上式中:errr表示三轴旋转的观测误差;为t时刻第i个三轴旋转粒子的权重;er为三轴旋转观测噪声;rzt为t时刻旋转的观测值;rxti为t时刻第i个粒子表示的三轴旋转;
49、3)、重采样与状态估计:
50、计算采样有效三轴位移粒子数nweff,若有效粒子数小于采样阈值,则进行重新采样,反之,计算实际三轴位移,表示如下:
51、
52、
53、上式中:nwth为位移粒子采样阈值;为最终粒子滤波后的三轴位移量;
54、完成三维位移粒子计算后,使用三维位移粒子对三维旋转粒子进行限制,若三维旋转对块体的影响大于三维旋转的1/n,则删除该粒子;同时计算有效三轴旋转粒子数nreff:若有效粒子数小于采样阈值,则进行重新采样,反之,计算实际三轴旋转:
55、
56、
57、上式中:nrth为旋转粒子采样阈值;为最终粒子滤波后的三轴旋转量;
58、考虑到滑坡块体的实际运动情况,限制粒子三轴位移分量的初始生成位置odis与三轴旋转的初始生成位置oangle,考虑到旋转角度极小,默认值始终为0;同时限制粒子运动范围[smax,smin],其中,三轴位移△w范围为odis的±20%,三轴旋转△r对滑块整体位移的最大影响为1/10,定义如下:
59、
60、oangle=0
61、
62、
63、上式中:n表示监测点的个数;wi表示第i个监测点的位移;表示块体位移的最大值与最小值;表示块体旋转的最大值和最小值;l表示对应块体对应边长。
64、本发明第二个目的在于,提供一种基于卷积双层粒子滤波的滑坡块体运动状态的预测系统。
65、为此,本发明的上述目的通过如下技术方案实现:
66、一种基于卷积双层粒子滤波的滑坡块体运动状态的预测系统,其特征在于:所述系统包括如下模块:
67、-滑坡块体划分模块,所述滑坡块体划分模块用于基于滑坡监测数据,根据滑坡不同块体在同一时刻运动趋势不同,使用聚类思想对滑坡块体进行划分,整合划分后块体内多个监测点信息;
68、-滑坡块体运动状态表达模块,所述滑坡块体运动状态表达模块用于通过粒子群优化策略寻找滑坡块体运动轨迹的全局最优解,将同一滑坡块体不同监测点的监测数据转换为滑坡块体的六自由度,滑坡块体的六自由度分别为滑坡块体的三轴位移和三轴旋转;
69、-滑坡运动状态预测模块,所述滑坡运动状态预测模块用于以滑坡的主要诱发因素月降雨量和滑坡块体上月的六自由度为输入,使用拟合函数构建观测方程,使用卷积神经网络构建预测方程,来分析滑坡块体当前时刻的运动情况。
70、本发明第三个目的在于,提供一种基于卷积双层粒子滤波的滑坡块体运动状态的预测装置。
71、为此,本发明的上述目的通过如下技术方案实现:
72、一种基于卷积双层粒子滤波的滑坡块体运动状态的预测装置,其特征在于:所述装置包括:
73、-至少一个处理器;
74、-至少一个存储器,用于存储至少一个计算机程序;
75、所述处理器执行存储器上的计算机程序以实现如前文所述的基于卷积双层粒子滤波的滑坡块体运动状态的预测方法步骤。
76、本发明还有一个目的在于,提供一种计算机存储介质。
77、为此,本发明的上述目的通过如下技术方案实现:
78、一种计算机存储介质,其特征在于:所述计算机存储介质上存储有计算机程序,所述计算机程序被计算机运行以实现如前文所述的基于卷积双层粒子滤波的滑坡块体运动状态的预测方法步骤。
79、本发明提供一种基于卷积双层粒子滤波的滑坡块体运动状态的预测方法、系统、装置及介质,具有如下优点和有益效果:
80、1)、本发明在使用聚类思想对滑坡块体划分的过程中,不仅考虑了块体中各监测点的运动情况,还考虑了各监测点的空间位置关系,解决了运动规律相同但实际位置分布不同的监测点划分困难的问题。
81、2)、本发明使用粒子群优化策略对滑坡块体进行运动状态分析,使用全局最优的六自由度表示滑坡块体的精确运动状态。
- 还没有人留言评论。精彩留言会获得点赞!