一种基于多尺度的目标识别方法及系统与流程
本发明涉及目标识别,尤其涉及一种基于多尺度的目标识别方法及系统。
背景技术:
1、目前,随着人工智能技术的不断发展,越来越多的行业开始使用人工智能技术解决本行业的难题。目标识别技术作为人工智能技术的一个分支,广泛地应用在电力系统的巡检过程。
2、现有已经公开的中国专利cn202211738526.0,一种基于无人机激光雷达的电力塔杆识别方法及系统,公开了包括:获取输电线路的原始点云数据;基于激光点云金字塔对输电线路的原始点云数据进行选取、粗差剔除和均匀抽稀处理,获取均匀分布的点云数据;对均匀分布的电云数据进行特征识别,获取不同的点云类别;对所获取的点云类别进行缺陷检测,判断在自身点云类别内部是否存在其他点云类别的数据,直至遍历所有的点云类别。其虽然提高了无人机进行输电线路巡检的效率和准确率;但是其是通过对数据预处理、特征识别、人工判读,提取当前工况下导线与周围地物存在的安全缺陷。即对无人机搭载相机采集巡检图像,巡检图像中包含杆塔、输电线或变压器等多种巡检目标,其仍需要借助人工判断方式进一步的进行修正,所以目前的巡检方法中使用目标识别技术对巡检图像中多种巡检目标进行识别时由于不同巡检目标的尺寸不同,导致目标识别结果中对不同尺度的巡检目标的识别精度较低,目标识别结果仍然不够准确。
技术实现思路
1、本发明的目的是提供一种基于多尺度的目标识别方法及系统,能够提高目标识别结果的准确性。
2、本发明采用的技术方案为:
3、一种基于多尺度的目标识别方法及系统,包括:
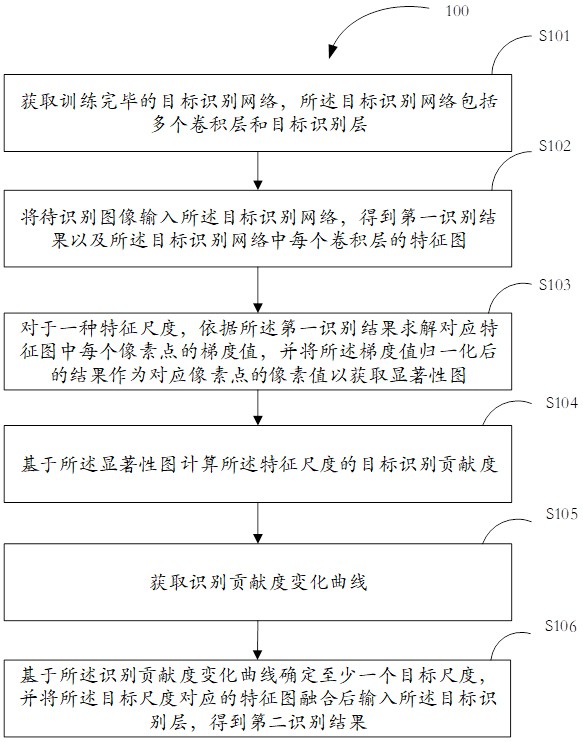
4、获取训练完毕的目标识别网络,所述目标识别网络包括多个卷积层和目标识别层,一个卷积层的特征图对应一种特征尺度;
5、将待识别图像输入所述目标识别网络,得到第一识别结果以及所述目标识别网络中每个卷积层的特征图;
6、对于一种特征尺度,依据所述第一识别结果求解对应特征图中每个像素点的梯度值,并将所述梯度值归一化后的结果作为对应像素点的像素值以获取显著性图;基于所述显著性图计算所述特征尺度的目标识别贡献度,所述目标识别贡献度用表征对应特征尺度对目标识别准确性的影响程度;
7、获取识别贡献度变化曲线,所述识别贡献度变化曲线的横坐标为特征尺度,纵坐标为所述特征尺度的识别贡献度;
8、基于所述识别贡献度变化曲线确定至少一个目标尺度,并将所述目标尺度对应的特征图融合后输入所述目标识别层,得到第二识别结果。
9、所述第一识别结果包括第一预测矩形框以及各第一预测矩形框的第一预测类别,所述特征图包括多个图像通道,所述特征图中一个像素点包括每个图像通道的数值,依据所述第一识别结果求解对应特征图中每个像素点的梯度值包括:对于所述特征图中的一个像素点,依据所述第一识别结果中的第一预测类别计算所述像素点在每个图像通道的梯度值;
10、将所有图像通道的梯度值之和组为所述像素点的梯度值。
11、所述基于所述显著性图计算所述特征尺度的目标识别贡献度包括:
12、对于一种特征尺度,依据最大类间方差法确定对应显著性图的阈值,并基于所述阈值对所述显著性图进行阈值分割,得到二值图;
13、基于所述显著性图和所述二值图计算所述特征尺度的目标识别贡献度。
14、所述目标识别贡献度满足关系式:
15、
16、其中,sumi为第i个特征尺度的显著性图中所有像素值之和,ti为第i个特征尺度的二值图,sum(ti)为二值图ti中所有像素值之和,wi×hi为第i个特征尺度的宽和高,gi为第i个特征尺度的目标识别贡献度。
17、所述基于所述识别贡献度变化曲线确定至少一个目标尺度包括:
18、获取所述识别贡献度变化曲线中的目标点,所述目标点包括最大值点和极大值点;将所有目标点对应的特征尺度作为目标尺度。
19、所述将所述目标尺度对应的特征图融合后输入所述目标识别层,得到第二识别结果包括:
20、将所有目标尺度中的最大尺度,并将所有目标尺度的特征图缩放至所述最大尺度;融合缩放后的所有特征图,得到融合特征图;
21、将所述融合特征图输入所述目标识别层,得到第二识别结果,所述第二识别结果包括第二预测矩形框以及各第二预测矩形框的第二预测类别。
22、所述融合缩放后的所有特征图,得到融合特征图包括:将缩放后的所有特征图相加,得到融合特征图。
23、所述融合缩放后的所有特征图,得到融合特征图包括:
24、获取每个目标尺度的目标识别贡献度;
25、依据所述目标识别贡献度计算缩放后特征图的权重,所述权重满足关系式:
26、
27、其中,gu为为目标尺度u的目标识别贡献度,sum(g)为所有目标尺度的目标识别贡献度之和,αu为目标尺度u对应的缩放后特征图的权重;
28、基于所述权重将缩放后的所有特征图进行加权求和,得到融合特征图。
29、一种基于多尺度的目标识别系统,包括处理器和存储器,所述存储器存储有计算机程序指令,当所述计算机程序指令被所述处理器执行时实现根据权利要求1至8中任一项所述的基于多尺度的目标识别方法。
30、本发明通过训练完毕的目标识别网络得到第一识别结果,依据第一识别结果获取目标识别网络中不同特征尺度的显著性图,依据显著性图计算每种特征尺度的目标识别贡献度,实现特征尺度对目标识别准确性影响程度的精准量化;进一步地,绘制识别贡献度变化曲线,并将最大值点和极大值点对应的特征尺度作为目标尺度,融合所有目标尺度的特征图,为目标识别网络中的目标识别层提供更多的有效信息,在保证计算速度基础上提高目标识别的准确性。
技术特征:
1.一种基于多尺度的目标识别方法及系统,其特征在于:包括:
2.根据权利要求1所述的一种基于多尺度的目标识别方法,其特征在于,所述第一识别结果包括第一预测矩形框以及各第一预测矩形框的第一预测类别,所述特征图包括多个图像通道,所述特征图中一个像素点包括每个图像通道的数值,依据所述第一识别结果求解对应特征图中每个像素点的梯度值包括:对于所述特征图中的一个像素点,依据所述第一识别结果中的第一预测类别计算所述像素点在每个图像通道的梯度值;
3.根据权利要求1所述的一种基于多尺度的目标识别方法,其特征在于,所述基于所述显著性图计算所述特征尺度的目标识别贡献度包括:
4.根据权利要求3所述的一种基于多尺度的目标识别方法,其特征在于,所述目标识别贡献度满足关系式:
5.根据权利要求1所述的一种基于多尺度的目标识别方法,其特征在于,所述基于所述识别贡献度变化曲线确定至少一个目标尺度包括:
6.根据权利要求1所述的一种基于多尺度的目标识别方法,其特征在于,所述将所述目标尺度对应的特征图融合后输入所述目标识别层,得到第二识别结果包括:
7.根据权利要求6所述的一种基于多尺度的目标识别方法,其特征在于,所述融合缩放后的所有特征图,得到融合特征图包括:将缩放后的所有特征图相加,得到融合特征图。
8.根据权利要求6所述的一种基于多尺度的目标识别方法,其特征在于,所述融合缩放后的所有特征图,得到融合特征图包括:
9.一种基于多尺度的目标识别系统,其特征在于,包括处理器和存储器,所述存储器存储有计算机程序指令,当所述计算机程序指令被所述处理器执行时实现根据权利要求1至8中任一项所述的基于多尺度的目标识别方法。
技术总结
本发明公开了一种基于多尺度的目标识别方法及系统,包括如下步骤:获取目标识别网络,所述目标识别网络包括多个卷积层和目标识别层;将待识别图像输入目标识别网络,得到第一识别结果以及每个卷积层的特征图;对于一种特征尺度,依据第一识别结果求解对应特征图中每个像素点的梯度值,并将所述梯度值归一化后的结果作为对应像素点的像素值以获取显著性图;基于所述显著性图计算特征尺度的目标识别贡献度;获取识别贡献度变化曲线以确定至少一个目标尺度,并将所述目标尺度对应的特征图融合后输入所述目标识别层,得到第二识别结果。通过本申请的技术方案,能够在保证计算速度基础上提高目标识别的准确性。
技术研发人员:弓鹏,朱赛伟,陶磊,马江旭,赵鹏飞,陈太雷,张衔
受保护的技术使用者:河南送变电建设有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!