多尺度大型浮式渔场平台动力响应数值计算方法
本发明涉及浮式渔场平台动力分析,具体而言,尤其涉及一种多尺度大型浮式渔场平台动力响应数值计算方法。
背景技术:
1、多尺度大型浮式渔场平台是一种整体尺度大、局部尺寸小的复杂结构,其中,整体指立柱和浮筒构成的组合结构,局部指柔性网衣。不同于仅有刚性主体框架的传统海上石油平台,也不同于上部为浮管和水下为网衣的传统重力式网箱,多尺度大型浮式渔场平台结构的特殊性促使波浪作用下浮式渔场平台的水动力特性表现极为复杂。
2、若采用单一的势流理论来计算作用于养殖平台上的波浪力,则无法准确评估作用于网衣上的流体荷载;而如果采用单一的莫里森方程来计算作用于网衣上的流体荷载,则无法准确评估作用于主体框架上的波浪绕射力。此外,直接采用流体动力学方法(cfd方法)对真实网线结构进行数值模拟,则会造成计算域网格数量过亿而无法计算,计算效率严重下降。
3、现有计算重力式网箱动力响应的数值方法主要是集中质量法和有限单元法,现有技术将小尺度柔性多孔透水网衣离散为细杆单元,采用莫里森方程将波浪力施加在离散单元上,结合牛顿第二定律可以计算出网箱的运动、变形和系泊力。现有技术方法虽然解决了网衣荷载计算和变形,但却无法准确计算作用于大尺度刚性结构上的波浪力。
4、有鉴于此,本发明提供一种多尺度大型浮式渔场平台动力响应数值计算方法。
技术实现思路
1、根据上述提出不足,而提供一种多尺度大型浮式渔场平台动力响应数值计算方法。本发明主要利用莫里森方程和辐射绕射理论相结合对浮式渔场平台系统在波浪作用下的动力响应进行求解,包括:忽略水体粘性对大尺度结构物的影响,大尺度结构物指立柱和浮筒构成的组合结构,入射波浪经过浮式渔场平台会发生绕射,浮式渔场平台运动对波浪产生辐射,考虑作用于浮式渔场平台的入射波浪力、辐射波浪力和绕射波浪力,有助于提高计算作用于大尺度结构上的波浪力的准确性。由于水体的粘性力对细小结构有很大影响,细小结构指网衣结构和系泊绳,因此采用莫里森方程计算作用于网衣结构和系泊绳上的波浪力,忽略波浪的辐射力和绕射力。结合流体域内、波面条件、水底条件、结构物表面条件和无穷远处辐射条件离散浮式渔场平台系统,利用边界元的方法布置源项点构造格林函数求解流体势函数,基于牛顿第二定律并采用预估-校正法求解整个浮式渔场平台结构的运动幅值和系泊力,最终构建波浪作用下浮式渔场平台动力响应数值计算方法,实现多尺度大型浮式渔场平台动力响应的准确计算,为深远海养殖装备的设计和优化提供理论支持。
2、本发明采用的技术手段如下:
3、本发明提供一种多尺度大型浮式渔场平台动力响应数值计算方法,包括:
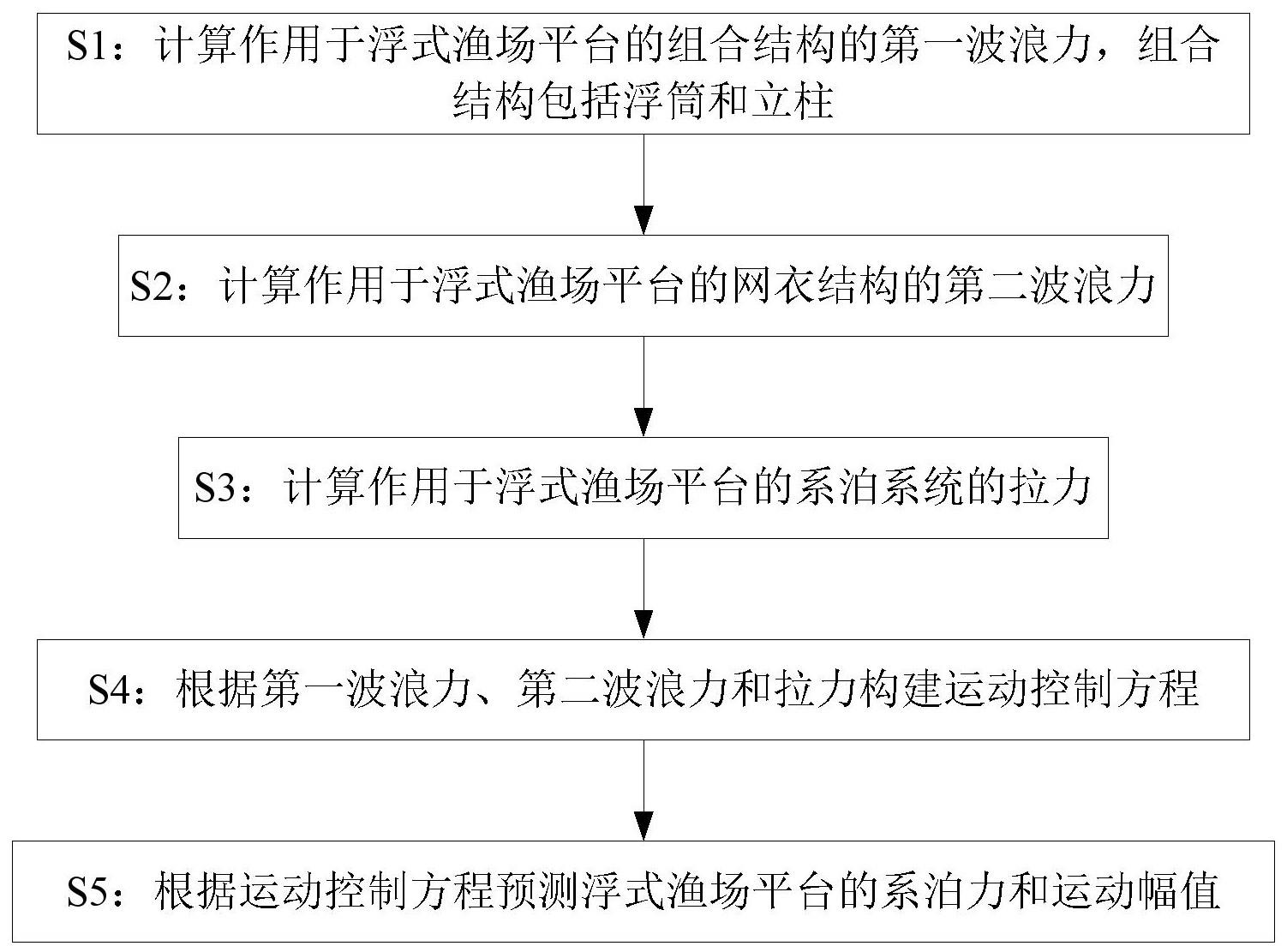
4、计算作用于浮式渔场平台的组合结构的第一波浪力,所述组合结构包括浮筒和立柱;
5、计算作用于所述浮式渔场平台的网衣结构的第二波浪力;
6、计算作用于所述浮式渔场平台的系泊系统的拉力;
7、根据所述第一波浪力、所述第二波浪力和所述拉力构建运动控制方程;
8、根据所述运动控制方程预测所述浮式渔场平台的系泊力和运动幅值。
9、进一步地,所述计算作用于浮式渔场平台的组合结构的第一波浪力,包括:
10、根据第一控制方程和环境边界条件计算空间项速度势函数,所述第一控制方程为拉普拉斯方程;
11、根据所述空间项速度势函数计算波浪动压力分布;
12、根据所述波浪动压力分布沿所述组合结构的表面积分得到所述第一波浪力。
13、进一步地,所述计算作用于所述浮式渔场平台的网衣结构的第二波浪力,包括:
14、采用莫里森公式计算作用于所述网衣结构的所述第二波浪力,按照以下公式计算:
15、;
16、其中,为所述第二波浪力,为流体密度,为阻力系数,为惯性力系数,为特征直径,为流体水质点速度,为所述网衣结构的杆件速度,为流体水质点加速度,为网衣结构的杆件加速度,为所述杆件的横截面积。
17、进一步地,所述计算作用于所述浮式渔场平台的系泊系统的拉力,包括:
18、所述系泊系统包括系泊绳;
19、若所述系泊系统为线弹性系统,所述拉力按照以下方式计算:
20、;
21、其中,为所述拉力,为系泊刚度,为所述系泊绳的未拉伸长度,为所述系泊绳拉伸后的长度。
22、进一步地,若所述系泊系统为非线性悬链线系泊系统,根据第二控制方程和所述系泊绳两端的边界条件计算所述拉力。
23、进一步地,所述第二控制方程,按照以下方式计算:
24、;
25、其中,为单位长度的结构质量,为单位长度的均布弯矩载荷,为系泊绳单元的第一个节点位置向量,为所述系泊绳单元的长度,为单位长度的所述系泊绳单元的重量,为单位长度的所述系泊绳单元的水动力载荷向量,为所述系泊绳单元第一个节点的缆绳张力,为所述系泊绳单元第一个节点的弯矩向量,为所述系泊绳单元第一个节点的剪切力向量,为第t时刻。
26、进一步地,所述根据所述第一波浪力、所述第二波浪力和所述拉力构建运动控制方程,包括:
27、根据所述第一波浪力计算一阶波浪激励力和二阶波浪激励力;
28、所述一阶波浪激励力、所述二阶波浪激励力、所述第二波浪力、所述拉力结合所述浮式渔场平台的位移变量、速度变量和加速度变量得到第三控制方程;
29、在所述第三控制方程中引入加速度脉冲函数矩阵,得到所述运动控制方程。
30、进一步地,所述运动控制方程,按照以下公式计算:
31、;
32、其中,为第t时刻作用于所述浮式渔场平台的总力,为所述浮式渔场平台质量和附加质量的总和,为整体运动的加速度,为渔场平台质量矩阵,为流体附加质量,为第t时刻位移的二阶导数,为外部作用力,为所述第t时刻位移的一阶导数,为第t时刻位移,为加速度脉冲函数矩阵,为阻尼矩阵,为总刚度矩阵。
33、进一步地,所述根据所述运动控制方程预测所述浮式渔场平台的系泊力和运动幅值,包括:
34、根据所述运动控制方程求解所述浮式渔场平台在第t时刻的加速度;
35、根据所述第t时刻的加速度预测所述浮式渔场平台在第t+dt时刻的计算速度和计算位移;
36、根据所述计算速度、所述计算位移和所述运动控制方程计算所述第t+dt时刻作用于所述浮式渔场平台的总力;
37、根据所述第t+1时刻作用于所述浮式渔场平台的总力得到所述第t+dt时刻的加速度;
38、根据所述第t+dt时刻的加速度采用泰勒展开求解,预测出所述浮式渔场平台在所述第t+dt时刻的速度和位移。
39、较现有技术相比,本发明具有以下优点:
40、本发明提供的多尺度大型浮式渔场平台动力响应数值计算方法,包括计算作用于浮式渔场平台的组合结构的第一波浪力,组合结构包括浮筒和立柱;计算作用于浮式渔场平台的网衣结构的第二波浪力;计算作用于浮式渔场平台的系泊系统的拉力;根据第一波浪力、第二波浪力和拉力构建运动控制方程;根据运动控制方程预测浮式渔场平台的速度和位移。通过将势流理论计算第一波浪力结合莫里森方程计算第二波浪力和拉力,以得到作用于浮式渔场平台的总力,利用运动控制方程求解浮式渔场平台的运动,即保证了数值模拟结果的准确性,又提高了计算效率,节省了大量人力、物力、财力和时间,为推动海水养殖由近岸向深远海转移,充分利用深海的优良水质,促进渔业的健康和可持续发展,提供了强有力的技术支持,极具创新性。
- 还没有人留言评论。精彩留言会获得点赞!