一种基于减摆器性能差异的地面共振计算方法与流程
本发明涉及但不限于直升机动力学,具体涉及一种基于减摆器性能差异的地面共振计算方法。
背景技术:
1、直升机地面共振是一种旋翼和机体耦合的动不稳定性问题,是自激振动。在常规地面共振计算分析中,一般假设旋翼的各个减摆器性能不存在差异,即设定各减摆器的刚度和阻尼相同,则设定各片桨叶的动力学特性相同,利用多桨叶坐标转换的方式,可以建立旋翼-机体耦合的平面动力模型,通过常规的矩阵特征值求解方法进行地面共振计算分析。
2、实际上,由于制造、工艺、使用环境等因素,不可避免地导致减摆器性能存在个体差异,那么各片桨叶的动力学特性相同的假设就不成立了,常规地面共振的计算方式不适用这种情况。
技术实现思路
1、本发明的目的:为了解决上述问题,本发明实施例提供一种基于减摆器性能差异的地面共振计算方法,以解决针对直升机地面共振的现有计算方式,由于设定各减摆器各向同性,且设定各片桨叶的动力学特性相同,从而导致获取得到的旋翼-机体耦合的动力学模型难以真实模拟直升机地面共振的实际情况的问题。
2、本发明的技术方案:
3、本发明实施例提供一种基于减摆器性能差异的地面共振计算方法,包括:
4、步骤1,基于减摆器性能差异,建立地面共振平面动力模型的旋翼-机体耦合运动方程组,并转换为一阶微分方程组,其中,所述旋翼-机体耦合运动方程组包括:旋翼运动方程和机体运动方程;
5、步骤2,基于以周期系数微分方程理论,对一阶微分方程组进行转换,得到可用于基于减摆器性能差异的地面共振计算的状态转换矩阵,以及基于减摆器性能差异的地面共振平面动力模型的特征值;
6、步骤3,对基于减摆器性能差异的地面共振计算结果进行分析,即基于减摆器性能差异的地面共振平面动力模型的特征值,对地面共振的稳定性进行分析。
7、可选地,如上所述的基于减摆器性能差异的地面共振计算方法中,所述步骤1中建立旋翼-机体耦合运动方程组包括:
8、基于平面内旋翼中n片桨叶的运动平衡关系,以及平面内机体2个自由度的运动平衡关系,建立具有n个自由度的旋翼运动方程和具有2个自由度的机体运动方程。
9、可选地,如上所述的基于减摆器性能差异的地面共振计算方法中,所述步骤1包括:
10、由力的平衡关系和力距的平衡关系,建立地面共振平面动力模型的机体运动方程;其中,所述机体运动方程包括:机体在航向的运动方程和机体在侧向的运动方程;对于每片桨叶,只考虑摆振角这一自由度,建立n片桨叶的地面共振平面动力模型的旋翼运动方程;
11、基于机体运动方程和旋翼运动方程,由矩阵理论得到一阶微分方程组的标准形式。
12、可选地,如上所述的基于减摆器性能差异的地面共振计算方法中,所述步骤1包括:
13、步骤11,基于平面内机体在航向的运动平衡关系,建立机体在航向的运动方程为:
14、
15、步骤12,基于平面内机体在侧向的运动平衡关系,建立机体在侧向的运动方程为:
16、
17、步骤13,基于平面内旋翼n个自由度的运动平衡关系,建立旋翼运动方程,包括n个桨叶的运动方程:
18、
19、其中,n为旋翼的桨叶片数;
20、步骤14,将所述旋翼-机体耦合运动方程组转换为简化运动方程为:
21、
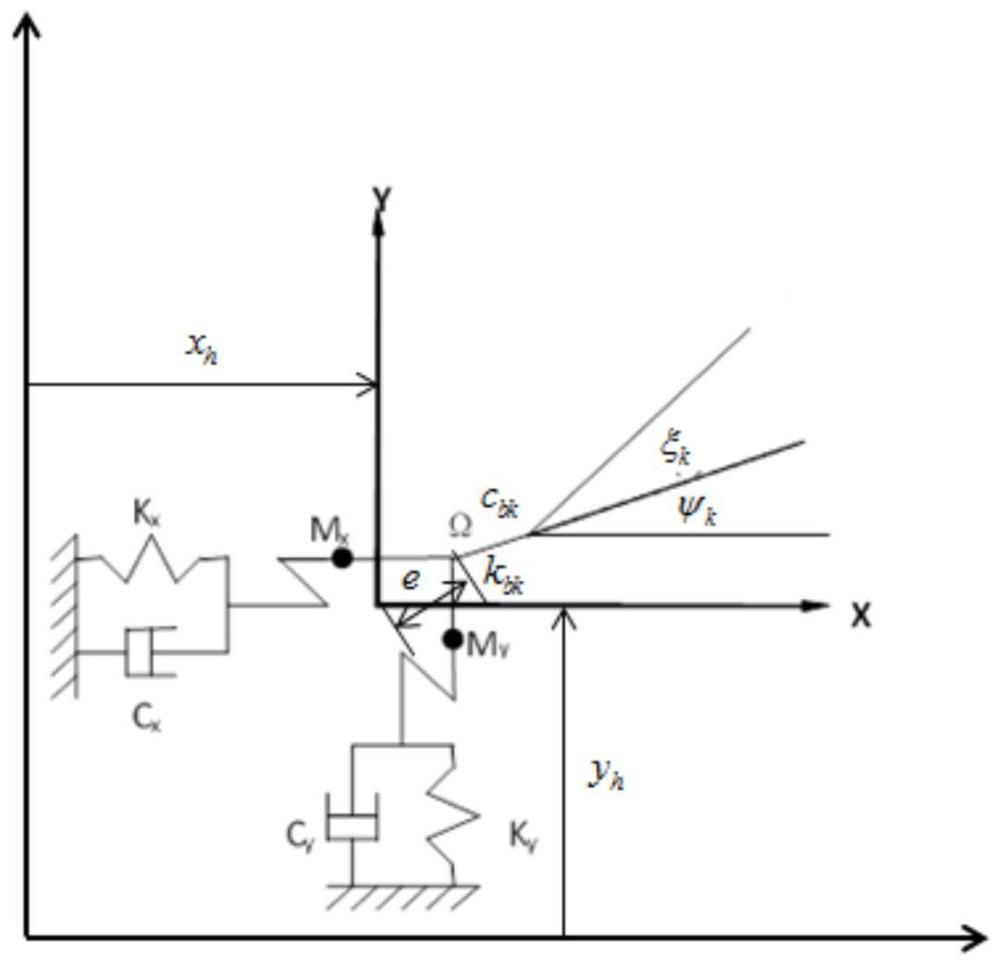
22、其中,y=(ξ1 ξ2 … ξk xh yh)t,且y表示旋翼-机体耦合运动方程组的运动自由度的集合;m为质量矩阵,c为阻尼矩阵,k为刚度矩阵;
23、步骤15,将简化运动方程转换为一阶微分方程组;
24、其中,xh为桨毂中心在固定坐标系中的纵向坐标,yh为桨毂中心在固定坐标系中的横向坐标,ω为旋翼转速,ξk为第k片桨叶的摆振角,ψk为第k片桨叶的方位角,e为摆振铰外伸量。
25、可选地,如上所述的基于减摆器性能差异的地面共振计算方法中,所述步骤15的转换方式为:
26、构建恒等方程并与采用简化运动方程组合形成如下方程:
27、
28、令则将上述方程转换为一阶微分方程组的标准形式为:
29、
30、其中,a(t)为周期系数矩阵:
31、可选地,如上所述的基于减摆器性能差异的地面共振计算方法中,所述步骤2包括:
32、步骤21,基于周期系数微分方程理论,得到一阶微分方程组的解的表达式为:
33、
34、其中,称为状态转换矩阵,t0为周期系数矩阵a(t)的t0时刻,t为周期系数矩阵a(t)的t时刻;
35、步骤22,利用状态转换矩阵、周期系数矩阵a(t)和一阶微分方程组的解的表达形式,可以得到如下方程式:
36、x(t+t)=φ(t0+t,t0)x(t);
37、其中,t为周期系数矩阵a(t)的周期;
38、步骤23,根据周期系数微分方程理论,存在周期为t的周期系数矩阵b(t)满足以下表达式:
39、
40、其中,λi为基于减摆器性能差异的地面共振平面动力模型的特征值;
41、步骤24,通过比较步骤23中表达式与一阶微分方程组的解的表达形式,可以得到状态转换矩阵为:
42、
43、步骤25,对于步骤24中的状态转换矩阵,当t=t0+t时,得到可用于基于减摆器性能差异的地面共振计算的状态转换矩阵为:
44、
45、其中,是状态转换矩阵φ(t0+t,t0)的特征值。
46、可选地,如上所述的基于减摆器性能差异的地面共振计算方法中,所述步骤3的分析方式包括:
47、步骤31,设定特征值λi的实部σi和虚部ωi分别为基于减摆器性能差异的地面共振平面动力模型的阻尼和频率,则特征值λi表示为:
48、
49、步骤32,计算出特征值λi的实部σi和虚部ωi分别为:
50、
51、可选地,如上所述的基于减摆器性能差异的地面共振计算方法中,所述步骤3的分析还包括:
52、步骤33,根据特征值的实部判别基于减摆器性能差异的地面共振的稳定性,包括:若特征值的实部小于零,在设定旋翼转速下地面共振是稳定的,若特征值的实部大于零,则地面共振不稳定。
53、本发明实施例还提供一种计算机可读存储介质,包括:存储器和处理器;
54、所述存储器,被配置为保存可执行指令;
55、所述处理器,被配置为在执行所述存储器保存的所述可执行指令时实现如上述任一项所述的基于减摆器性能差异的地面共振计算方法。
56、本发明的有益效果:
57、本发明实施例提供一种基于减摆器性能差异的地面共振计算方法,通过建立基于减摆器性能差异的地面共振平面动力模型的旋翼-机体耦合运动方程组,且旋翼-机体耦合运动方程组包含n+2个方程(n个桨叶运动方程和2个机体运动方程),n+2个运动自由度(其中,n个桨叶摆振运动自由度、桨毂中心的横向运动自由度和纵向运动自由度)。在这种旋翼振动系统和机体振动系统都是各向异性的情况下,无论是采用多桨叶坐标转换将桨叶摆振运动自由度转换到机体固定坐标系中,还是将机体运动自由度转换到多桨叶坐标系中,都不能消除耦合运动方程中的周期系数(即说明无法求解),也没有其它转换方式。本发明设计人员通过分析,结合工程实际,在各向异性情况下的减摆器性能差异的地面共振运动方程中必然具有周期系数,从而借助基于周期系数微分方程理论进行稳定性分析,通过理论推导建立一种基于减摆器性能差异的地面共振计算方法。该方法通用性好,易于理解,计算所需的参数可通过测量或计算获得,计算分析结论可用于指导型号设计,具有要重要的工程借鉴意义。
- 还没有人留言评论。精彩留言会获得点赞!