一种高速公路车辆识别方法、系统、设备及介质与流程
本发明涉及计算机,尤其是一种高速公路车辆识别方法、系统、设备及介质。
背景技术:
1、高速公路的车辆识别与跟踪一直是高速公路监控的重点内容。为提高监控的准确性,大量的视频检测设备记系统在不断的被研发与使用。然而,由于视频数据无法准确检测车辆的位置和速度信息,使得其难以对车辆进行准确跟踪。相关技术中,使用毫米波雷达可以有效的对车辆进行跟踪,然而毫米波雷达的数据稀疏,难以获得对车辆进行有效的识别。综合上述,相关技术中存在的技术问题亟需得到解决。
技术实现思路
1、有鉴于此,本发明实施例提供一种高速公路车辆识别方法、系统、设备及介质,以对车辆进行精准跟踪。
2、一方面,本发明提供了一种高速公路车辆识别方法,所述方法包括:
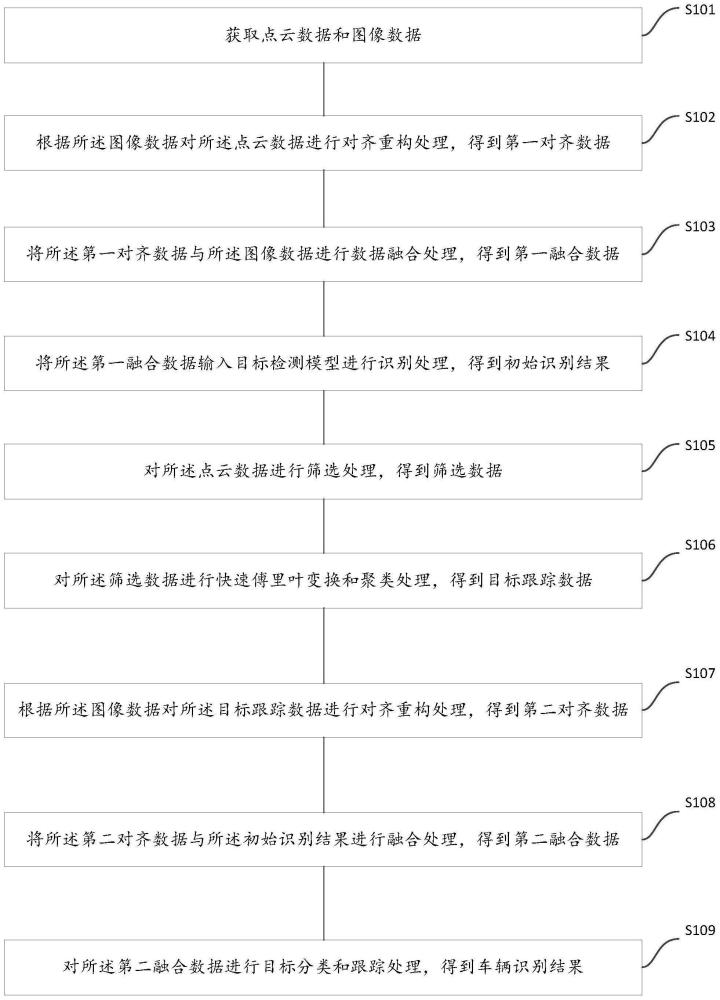
3、获取点云数据和图像数据;
4、根据所述图像数据对所述点云数据进行对齐重构处理,得到第一对齐数据;
5、将所述第一对齐数据与所述图像数据进行数据融合处理,得到第一融合数据;
6、将所述第一融合数据输入目标检测模型进行识别处理,得到初始识别结果;
7、对所述点云数据进行筛选处理,得到筛选数据;
8、对所述筛选数据进行快速傅里叶变换和聚类处理,得到目标跟踪数据;
9、根据所述图像数据对所述目标跟踪数据进行对齐重构处理,得到第二对齐数据;
10、将所述第二对齐数据与所述初始识别结果进行融合处理,得到第二融合数据;
11、对所述第二融合数据进行目标分类和跟踪处理,得到车辆识别结果。
12、可选地,所述根据所述图像数据对所述点云数据进行对齐重构处理,得到第一对齐数据,包括:
13、获取得到所述图像数据的采样时间和所述点云数据的采样时间,计算得到采样时间差;
14、根据所述采样时间差对所述点云数据进行重构处理,得到第一对齐数据。
15、可选地,所述将所述第一对齐数据与所述图像数据进行数据融合处理,得到第一融合数据,包括:
16、获取得到所述第一对齐数据的速度信息和所述图像数据的坐标信息;
17、根据所述坐标信息将所述速度信息投影到所述图像数据中,得到第一融合数据。
18、可选地,所述将所述第一融合数据输入目标检测模型进行识别处理,得到初始识别结果,包括:
19、对所述目标检测模型的三通道输入模块替换为带有速度信息的五通道输入模块;
20、将所述第一融合数据输入替换后的目标检测模型进行识别处理,输出得到初始识别结果。
21、可选地,所述对所述点云数据进行筛选处理,得到筛选数据,包括:
22、根据毫米波雷达的布置位置构建有效点云区域;
23、根据所述有效点云区域对所述点云数据进行筛选,得到筛选数据。
24、可选地,所述根据毫米波雷达的布置位置构建有效点云区域,包括:
25、获取所述毫米波雷达的探测距离;
26、根据所述毫米波雷达的布置位置和所述探测距离对高速公路进行分割处理,得到道路边界;
27、根据所述道路边界构建得到有效点云区域。
28、可选地,所述对所述第二融合数据进行目标分类和跟踪处理,得到车辆识别结果,包括:
29、将所述第二融合数据与所述初始识别结果进行对比处理,得到检测目标;
30、对所述第二融合数据与所述初始识别结果进行速度均值计算处理,并对计算得到的均值进行极小值滤波处理,得到车辆识别结果。
31、另一方面,本发明实施例还提供了一种高速公路车辆识别系统,包括:
32、第一模块,用于获取点云数据和图像数据;
33、第二模块,用于根据所述图像数据对所述点云数据进行对齐重构处理,得到第一对齐数据;
34、第三模块,用于将所述第一对齐数据与所述图像数据进行数据融合处理,得到第一融合数据;
35、第四模块,用于将所述第一融合数据输入目标检测模型进行识别处理,得到初始识别结果;
36、第五模块,用于对所述点云数据进行筛选处理,得到筛选数据;
37、第六模块,用于对所述筛选数据进行快速傅里叶变换和聚类处理,得到目标跟踪数据;
38、第七模块,用于根据所述图像数据对所述目标跟踪数据进行对齐重构处理,得到第二对齐数据;
39、第八模块,用于将所述第二对齐数据与所述初始识别结果进行融合处理,得到第二融合数据;
40、第九模块,用于对所述第二融合数据进行目标分类和跟踪处理,得到车辆识别结果。
41、另一方面,本发明实施例还公开了一种电子设备,包括处理器以及存储器;
42、所述存储器用于存储程序;
43、所述处理器执行所述程序实现如前面所述的方法。
44、另一方面,本发明实施例还公开了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现如前面所述的方法。
45、另一方面,本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
46、本发明采用以上技术方案与现有技术相比,具有以下技术效果:本发明实施例通过对点云数据进行对齐重构后与图像数据进行融合,再将融合后数据输入目标检测模块进行识别得到初始识别结果。并且,本发明实施例还通过对点云数据进行筛选、快速傅里叶变换和聚类处理得到目标跟踪数据,将目标跟踪数据与初始化识别结果进行对齐融合,从而对融合后的数据进行目标分类和跟踪,本发明实施例通过对点云数据和图像数据进行数据前融合和后融合,可以大幅度的提高识别与跟踪的准确性和稳定性,能够得到更准确的车辆的识别与跟踪结果。
技术特征:
1.一种高速公路车辆识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述图像数据对所述点云数据进行对齐重构处理,得到第一对齐数据,包括:
3.根据权利要求1所述的方法,其特征在于,所述将所述第一对齐数据与所述图像数据进行数据融合处理,得到第一融合数据,包括:
4.根据权利要求1所述的方法,其特征在于,所述将所述第一融合数据输入目标检测模型进行识别处理,得到初始识别结果,包括:
5.根据权利要求1所述的方法,其特征在于,所述对所述点云数据进行筛选处理,得到筛选数据,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据毫米波雷达的布置位置构建有效点云区域,包括:
7.根据权利要求1所述的方法,其特征在于,所述对所述第二融合数据进行目标分类和跟踪处理,得到车辆识别结果,包括:
8.一种高速公路车辆识别系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,所述电子设备包括存储器和处理器;
10.一种计算机可读存储介质,所述存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法。
技术总结
本发明公开了一种高速公路车辆识别方法、系统、设备及介质,方法包括:获取点云数据和图像数据;根据图像数据对点云数据进行对齐重构处理,得到第一对齐数据;将第一对齐数据与图像数据进行数据融合处理,得到第一融合数据;将第一融合数据输入目标检测模型进行识别处理,得到初始识别结果;对点云数据进行筛选处理,得到筛选数据;对筛选数据进行快速傅里叶变换和聚类处理,得到目标跟踪数据;根据图像数据对目标跟踪数据进行对齐重构处理,得到第二对齐数据;将第二对齐数据与初始识别结果进行融合处理,得到第二融合数据;对第二融合数据进行目标分类和跟踪处理,得到车辆识别结果。本发明能够提高识别的准确度,可广泛应用于计算机领域。
技术研发人员:凌晔华,姚英云,覃福军,李冬喆,陆璐,梁杏,陈静
受保护的技术使用者:广西交科集团有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!