一种物体三维位置确定方法、装置、设备及介质与流程
本发明涉及图像处理,具体而言,涉及一种物体三维位置确定方法、装置、设备及介质。
背景技术:
1、在自动驾驶领域,为了使车辆能够在行驶过程中自动对周围的物体进行识别,通常需要预先获取标注有这些物体的类别、位置、尺寸等信息的二维图像、三维点云数据等数据样本,使车辆进行机器训练学习。
2、但现有的数据标注工具在对二维图像进行标注时,仅能判断二维图像对应的三维视角范围,不能确定二维图像中的物体的三维位置。在实际的数据标注场景下,工作人员采用现有的数据标注工具,只能先根据自身专业知识和工作经验,标注二维图像中的目标物体的三维位置,再根据三维点云数据定位目标物体的实际三维位置,根据目标物体的实际三维位置调整二维图像中的目标物体的标注信息,难以高效确定二维图像中的目标物体的三维位置。
技术实现思路
1、本发明实施例的目的在于提供一种物体三维位置确定方法、装置、设备及介质,用以实现高效确定二维图像中目标物体的三维位置的技术效果。
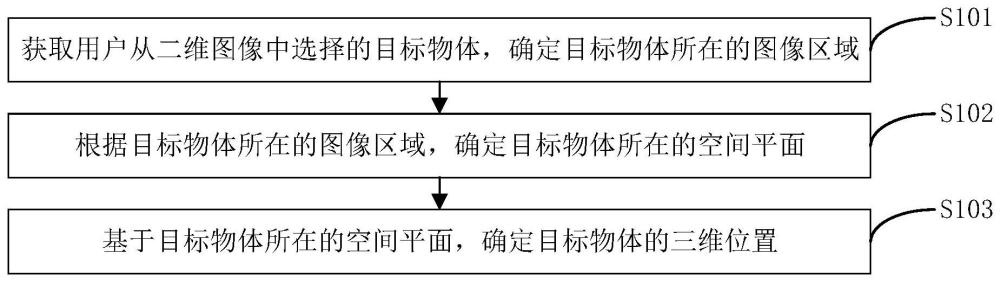
2、第一方面,本发明实施例提供一种物体三维位置确定方法,包括:
3、获取用户从二维图像中选择的目标物体,确定所述目标物体所在的图像区域;
4、根据所述目标物体所在的图像区域,确定所述目标物体所在的空间平面;
5、基于所述目标物体所在的空间平面,确定所述目标物体的三维位置。
6、在上述实现过程中,通过针对用户从二维图像中选择的目标物体,根据目标物体所在的图像区域,确定目标物体所在的空间平面,进而确定目标物体的三维位置,能够直接基于二维图像确定目标物体的三维位置,实现高效确定二维图像中目标物体的三维位置的技术效果。
7、进一步地,所述获取用户从二维图像中选择的目标物体,具体包括:
8、响应所述用户发起的三维位置确定请求,实时监测所述用户对所述二维图像的鼠标操作指令;
9、在监测到所述用户对所述二维图像的鼠标操作指令时,将所述二维图像中处于鼠标操作位置的物体作为所述目标物体。
10、在上述实现过程中,通过响应用户发起的三维位置确定请求,实时监测用户对二维图像的鼠标操作指令来获取用户从二维图像中选择的目标物体,能够简化用户操作,方便用户快速从二维图像中选择目标物体,有利于更加高效地确定二维图像中目标物体的三维位置。
11、进一步地,所述确定所述目标物体所在的图像区域,具体包括:
12、基于预先建立的图像区域确定模型,根据所述目标物体的相机坐标和所述二维图像的像素总数,确定所述目标物体所在的图像区域。
13、在上述实现过程中,通过基于预先建立的图像区域确定模型,根据目标物体的相机坐标和二维图像的像素总数,确定目标物体所在的图像区域,能够快速准确地确定目标物体所在的图像区域,有利于更加高效地确定二维图像中目标物体的三维位置。
14、进一步地,所述图像区域确定模型为:
15、
16、其中,area为所述目标物体所在的图像区域,xc为所述目标物体的相机x方向坐标,xc为所述二维图像的x方向像素总数。
17、在上述实现过程中,通过预先建立上式所示的图像区域确定模型,能够快速准确地确定目标物体的图像区域,有利于更加高效地确定二维图像中目标物体的三维位置。
18、进一步地,所述根据所述目标物体所在的图像区域,确定所述目标物体所在的空间平面,具体包括:
19、获取图像采集设备的水平视野区域;
20、基于预先建立的偏移角度确定模型,根据所述图像采集设备的水平视野角度和所述目标物体所在的图像区域,确定所述目标物体的偏移角度;
21、根据所述目标物体的偏移角度,在所述图像采集设备的水平视野区域内确定所述图像采集设备对所述目标物体的水平视线;
22、将所述图像采集设备对所述目标物体的水平视线所在的垂直平面作为所述目标物体所在的空间平面。
23、在上述实现过程中,通过基于预先建立的偏移角度确定模型,根据图像采集设备的水平视野角度和目标物体所在的图像区域,确定目标物体的偏移角度,以及根据目标物体的偏移角度,在图像采集设备的水平视野区域内定位出图像采集设备对目标物体的水平视线所在的垂直平面作为目标物体所在的空间平面,能够快速准确地确定目标物体所在的空间平面,有利于更加高效地确定二维图像中目标物体的三维位置。
24、进一步地,所述获取图像采集设备的水平视野区域,具体包括:
25、在三维空间中构造一个水平扇形,将所述水平扇形所在的区域作为所述图像采集设备的水平视野区域;
26、其中,所述水平扇形的圆心是根据所述图像采集设备的世界坐标确定的,所述水平扇形的圆心角等于所述图像采集设备的水平视野角度,所述水平扇形的对称轴与所述图像采集设备的拍摄中心线重合。
27、在上述实现过程中,通过结合图像采集设备的世界坐标、水平视野角度、拍摄中心线等设备参数,在三维空间中构造一个水平扇形,将水平扇形所在的区域作为图像采集设备的水平视野区域,能够快速准确地模拟图像采集设备的水平视野区域,有利于更加高效地确定二维图像中目标物体的三维位置。
28、进一步地,所述偏移角度确定模型为:
29、angle=α×area;
30、其中,angle为所述目标物体的偏移角度,α为所述图像采集设备的水平视野角度,area为所述目标物体所在的图像区域。
31、在上述实现过程中,通过预先建立上式所示的偏移角度确定模型,能够快速准确地确定目标物体的偏移角度,有利于更加高效地确定二维图像中目标物体的三维位置。
32、进一步地,所述基于所述目标物体所在的空间平面,确定所述目标物体的三维位置,具体包括:
33、将所述目标物体所在的空间平面投影到三维空间的地平面上,得到目标射线;
34、基于所述目标射线,确定所述目标物体的三维位置。
35、在上述实现过程中,通过将目标物体所在的空间平面投影到三维空间的地平面上,基于得到的目标射线,确定目标物体的三维位置,能够保证有效准确地确定目标物体的三维位置,有利于更加高效地确定目标物体的三维位置。
36、第二方面,本发明实施例提供一种物体三维位置确定装置,包括:
37、图像区域确定模块,用于获取用户从二维图像中选择的目标物体,确定所述目标物体所在的图像区域;
38、空间平面确定模块,用于根据所述目标物体所在的图像区域,确定所述目标物体所在的空间平面;
39、三维位置确定模块,用于基于所述目标物体所在的空间平面,确定所述目标物体的三维位置。
40、第三方面,本发明实施例提供一种电子设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序;所述存储器与所述处理器耦接,且所述处理器执行所述计算机程序时实现如上所述的物体三维位置确定方法。
41、第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序;其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如上所述的物体三维位置确定方法。
- 还没有人留言评论。精彩留言会获得点赞!