一种障碍物检测方法及电子设备、存储介质与流程
本申请涉及智能识别,特别是涉及一种障碍物检测方法及电子设备、存储介质。
背景技术:
1、在现有技术中,在智能识别技术领域中,利用检测算法对障碍物进行识别的过程中只考虑了障碍物与检测设备之间的距离变化情况,却无法精确提供障碍物的具体范围信息。例如,在自动驾驶汽车领域中,通常利用激光雷达对道路上的障碍物进行检测,将获取的几帧激光雷达检测到的数据进行配准后融合为一帧具有较高密度的点云数据,之后再对该高密度的点云数据进行障碍物检测。但是该方法中的高密度的点云数据所提供的障碍物信息也是多帧结合后的信息,这将使得提供的障碍物信息比实际的障碍物范围要大些,将严重影响对障碍物的检测精度。
技术实现思路
1、本申请至少提供一种障碍物检测方法及电子设备、存储介质,能够提升障碍物的检测精度。
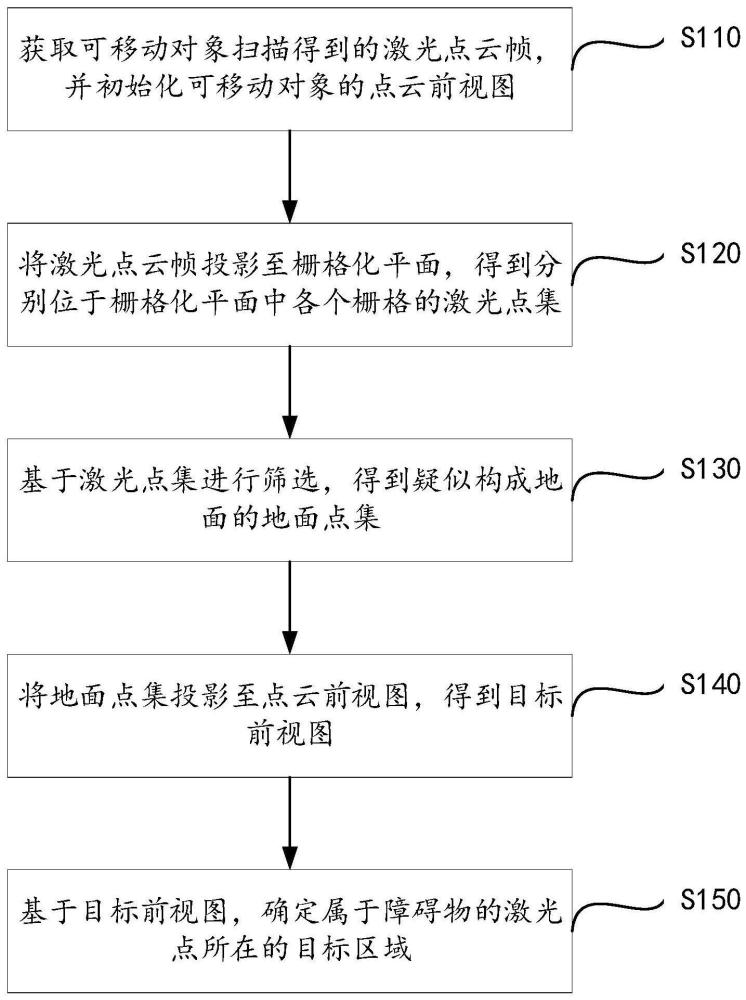
2、本申请第一方面提供了一种障碍物检测方法,该方法包括:获取可移动对象扫描得到的激光点云帧,并初始化可移动对象的点云前视图;其中,点云前视图的尺寸与可移动对象的扫描头数以及每个扫描头的扫描点数相关;将激光点云帧投影至栅格化平面,得到分别位于栅格化平面中各个栅格的激光点集;基于激光点集进行筛选,得到疑似构成地面的地面点集;将地面点集投影至点云前视图,得到目标前视图;其中,目标前视图中每个像素位置至多投影一个激光点;基于目标前视图,确定属于障碍物的激光点所在的目标区域。
3、其中,在将激光点云帧投影至栅格化平面,得到分别位于栅格化平面中各个栅格的激光点集之前,方法还包括:获取包含至少两块子区域的栅格化平面;其中,子区域由内到外逐层包围设置,且内层子区域的栅格边长小于外层子区域;将激光点云帧投影至栅格化平面,得到分别位于栅格化平面中各个栅格的激光点集,包括:确定激光点云帧中激光点所在的子区域;基于激光点所在子区域的区域径长、栅格边长和激光点的坐标位置,确定激光点投影至栅格化平面后所在的栅格,以得到分别位于栅格化平面中各个栅格的激光点集。
4、其中,基于激光点集进行筛选,得到疑似构成地面的地面点集,包括:从激光点集中选取疑似为地面点的激光点,得到平面点集;基于平面点集迭代筛选疑似构成地面的激光点,得到地面点集。
5、其中,从激光点集中选取疑似为地面点的激光点,得到平面点集,包括:基于激光点的坐标位置,得到激光点的高度值;按照高度值由低到高的顺序,从激光点集中选取激光点存入地面点集。
6、其中,基于平面点集迭代筛选疑似构成地面的激光点,得到地面点集,包括:基于用于本次迭代的平面点集进行特征值分解,得到用于本次迭代的平面点集的拟合平面的第一法向量;基于第一法向量和激光点的坐标位置,获取激光点至拟合平面的点面距离;从用于本次迭代的平面点集中筛选点面距离满足预设距离条件的激光点,得到新的平面点集,并重新执行基于用于本次迭代的平面点集进行特征值分解,得到用于本次迭代的平面点集的拟合平面的第一法向量的步骤,直至满足迭代结束条件为止;至少基于最新平面点集的第一法向量,确定是否选择最新平面点集作为地面点集。
7、其中,将地面点集投影至点云前视图,得到目标前视图,包括:基于地面点集中激光点的坐标位置和帧序号,确定点云前视图中与激光点对应的像素点;基于激光点的坐标位置和激光点至地面点集的拟合平面的点面距离,为点云前视图中与激光点对应的像素点赋值,得到目标前视图。
8、其中,基于目标前视图,确定属于障碍物的激光点所在的目标区域,包括:清空目标前视图中对应激光点属于干扰点的像素点;对最新目标前视图中像素值为非空的像素点进行聚类,得到若干候选类别簇;其中,候选类别簇包含空间位置连续的若干激光点;基于候选类别簇进行筛选,选择候选类别簇作为目标类别簇;基于目标类别簇中激光点,确定目标区域。
9、其中,清空目标前视图中对应激光点属于干扰点的像素点,包括:基于目标前视图中各个像素值非空的像素点的第一邻域中像素值为空的像素点数,确定是否清空像素点;对于目标前视图中剩余像素值非空的像素点,基于像素点对应的点面距离是否大于预设距离,确定是否清空像素点;其中,像素点对应的点面距离为像素点对应激光点至地面点集的拟合平面之间距离。
10、其中,对最新目标前视图中像素值为非空的像素点进行聚类,得到若干候选类别簇,包括:在最新目标前视图中,选择像素值为非空且未被聚类的像素点作为第一目标点,并为第一目标点创建对应的候选类别簇,以及将第一目标点加入对应的候选类别簇;选取目标前视图中第一目标点的第二邻域内中满足预设筛选条件的像素点,加入至第一目标点对应的候选类别簇中;判断第一目标点对应的候选类别簇中各个像素点是否均检查过各自的第二邻域;响应于第一目标点对应的候选类别簇中存在未检查过自身第二邻域的像素点,选择未检查过自身第二邻域的像素点,作为第二目标点,并选取目标前视图中第二目标点的第二邻域内满足预设筛选条件的像素点,加入至第一目标点对应的候选类别簇中,并返回执行判断第一目标点对应的候选类别簇中各个像素点是否均检查过各自的第二邻域的步骤;响应于第一目标点对应的候选类别簇中各个像素点均检查过各自的第二邻域,返回执行在最新目标前视图中,选择像素值为非空且未被聚类的像素点作为第一目标点的步骤,直至目标前视图中像素值为非空的像素点均被遍历为止。
11、其中,基于候选类别簇进行筛选,选择候选类别簇作为目标类别簇,包括:对候选类别簇进行特征值分解,得到特征向量和第二法向量;利用第二法向量除以特征向量,得到类别值;将类别值与预设值进行对比,若对比结果为类别值小于或等于预设值,则将候选类别簇作为目标类别簇。
12、本申请第二方面提供了一种电子设备,包括相互耦接的存储器和处理器,处理器用于执行存储器中存储的程序指令,以实现上述第一方面中的障碍物检测方法。
13、本申请第三方面提供了一种计算机可读存储介质,其上存储有程序指令,程序指令被处理器执行时实现上述第一方面中的障碍物检测方法。
14、上述方案,利用可移动对象对待检测区域进行扫描得到激光点云帧,将得到的激光点云帧投影至栅格化平面,并将位于栅格化平面中各个栅格的激光点云帧作为激光点集,以提升后续数据的计算速率,对栅格化平面中的栅格对应的激光点集进行筛选,选出其中疑似构成地面的平面点集,再将平面点集中的每一个激光点投影至已初始化的点云前视图中对应的像素上,得到目标前视图,再通过目标前视图,确定待检测区域中属于障碍物的激光点所在的目标区域,以此将扫描的每一帧激光点云划分在多个栅格内,之后对每个栅格中的激光点进行识别分类,以得到障碍物的激光点云,从而能够提升障碍物的检测精度。
15、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本申请。
技术特征:
1.一种障碍物检测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述将所述激光点云帧投影至栅格化平面,得到分别位于所述栅格化平面中各个栅格的激光点集之前,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述激光点集进行筛选,得到疑似构成地面的地面点集,包括:
4.根据权利要求3所述的方法,其特征在于,所述从所述激光点集中选取疑似为地面点的激光点,得到平面点集,包括:
5.根据权利要求3所述的方法,其特征在于,所述基于所述平面点集迭代筛选疑似构成地面的激光点,得到所述地面点集,包括:
6.根据权利要求1所述的方法,其特征在于,所述将所述地面点集投影至所述点云前视图,得到目标前视图,包括:
7.根据权利要求1所述的方法,其特征在于,所述基于所述目标前视图,确定属于障碍物的激光点所在的目标区域,包括:
8.根据权利要求7所述的方法,其特征在于,所述清空所述目标前视图中对应所述激光点属于干扰点的像素点,包括:
9.根据权利要求7所述的方法,其特征在于,所述对最新所述目标前视图中像素值为非空的像素点进行聚类,得到若干候选类别簇,包括:
10.根据权利要求7所述的方法,其特征在于,所述基于所述候选类别簇进行筛选,选择所述候选类别簇作为目标类别簇,包括:
11.一种电子设备,其特征在于,包括相互耦接的存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现权利要求1至10任一项所述的障碍物检测方法。
12.一种计算机可读存储介质,其上存储有程序指令,其特征在于,所述程序指令被处理器执行时实现权利要求1至10任一项所述的障碍物检测方法。
技术总结
本申请公开了一种障碍物检测方法及电子设备、存储介质,该方法包括:获取可移动对象扫描得到的激光点云帧,并初始化可移动对象的点云前视图;其中,点云前视图的尺寸与可移动对象的扫描头数以及每个扫描头的扫描点数相关;将激光点云帧投影至栅格化平面,得到分别位于栅格化平面中各个栅格的激光点集;基于激光点集进行筛选,得到疑似构成地面的地面点集;将地面点集投影至点云前视图,得到目标前视图;其中,目标前视图中每个像素位置至多投影一个激光点;基于目标前视图,确定属于障碍物的激光点所在的目标区域。上述方案,能够提升障碍物的检测精度。
技术研发人员:曾圣尧,华智,胡来丰
受保护的技术使用者:浙江零跑科技股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!