连通域定位方法、图形处理器、设备和生产线与流程
本技术实施例涉及图像处理,涉及但不限于一种连通域定位方法、图形处理器、设备和生产线。
背景技术:
1、在当前的图像算法中,连通域定位是很多图像任务的基础,比如,在电池产线的锂电池模切极片的缺陷检测过程中,可以通过连通域定位来实现对极片上可疑缺陷区域的定位。相关技术中,模切极片缺陷检测使用的连通域定位算法都是基于中央处理器(cpu,central processing unit)实现的,比如,cpu调用开源计算机视觉库(open cv,opensource computer vision library)的find contours函数来实现二值图像中连通域的查找与定位。
2、但是,产线上的程序大都使用cpu来实现,在cpu硬件资源不足的情况下,连通域定位程序运行过程中会出现卡顿,会导致产线暂停,不仅影响了产线的生产效率,还会导致成本的增加。
技术实现思路
1、为解决相关技术存在的问题,本技术实施例提供一种连通域定位方法、图形处理器、设备和生产线,能够通过图形处理器对图像的连通域进行定位,能够快速确定出极片等工件表面的缺陷,不仅减少了产线上cpu的计算量,还减少了产线上程序运行卡顿的情况,提升了产线运行效率。
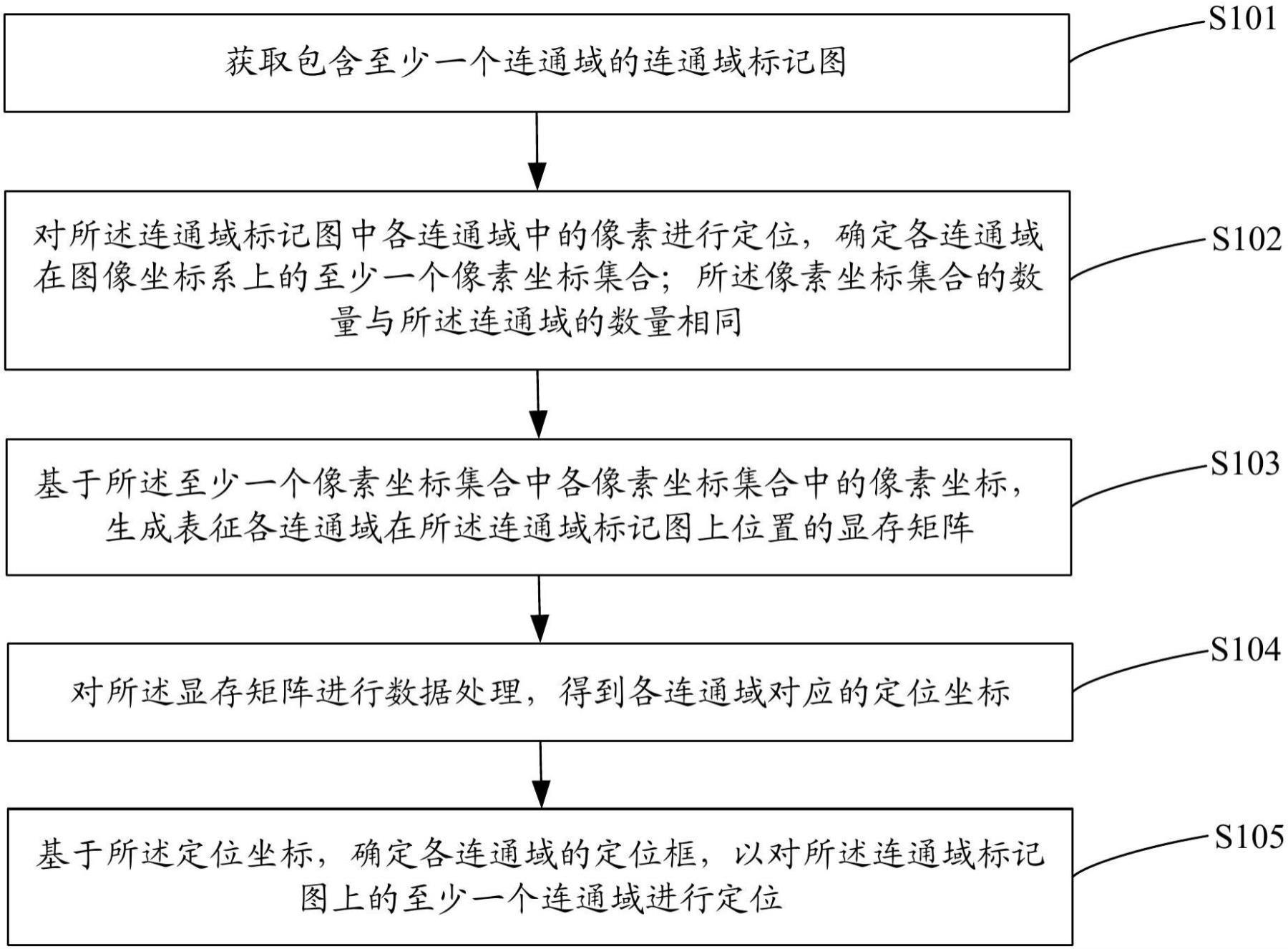
2、第一方面,本技术提供一种连通域定位方法,应用于图形处理器;所述定位方法包括:获取包含至少一个连通域的连通域标记图;对所述连通域标记图中各连通域中的像素进行定位,确定各连通域在图像坐标系上的至少一个像素坐标集合;所述像素坐标集合的数量与所述连通域的数量相同;基于所述至少一个像素坐标集合中各像素坐标集合中的像素坐标,生成表征各连通域在所述连通域标记图上位置的显存矩阵;对所述显存矩阵进行数据处理,得到各连通域对应的定位坐标;基于所述定位坐标,确定各连通域的定位框,以对所述连通域标记图上的至少一个连通域进行定位。
3、上述实施例中,在获取连通域标记图之后,基于gpu对连通域标记图中各连通域中的像素进行定位,确定出各连通域对应的定位坐标,从而确定出各连通域的定位框,如此,基于gpu实现了图像的连通域定位,能够快速确定出极片等工件表面的缺陷,在极片进入卷绕前去除了有缺陷的极片,提高了电芯的良率;还减少了产线上cpu的计算量,减少了产线上程序运行卡顿的情况,提升了产线运行效率。
4、在一些实施例中,所述基于所述至少一个像素坐标集合中各像素坐标集合中的像素坐标,生成表征各连通域在所述连通域标记图上位置的显存矩阵,包括:基于所述至少一个像素坐标集合,确定各连通域中的像素在图像坐标系第一方向上不重复的第一坐标数值和第二方向上不重复的第二坐标数值;所述第一方向与所述第二方向垂直;基于所述第一坐标数值和所述第二坐标数值,生成表征各连通域在第一方向上位置的第一显存矩阵和表征各连通域在第二方向上位置的第二显存矩阵;所述显存矩阵包括所述第一显存矩阵和所述第二显存矩阵。
5、在一些实施例中,所述对所述显存矩阵进行数据处理,得到各连通域对应的定位坐标,包括:遍历所述第一显存矩阵,确定各连通域在第一方向上的最大坐标数值和最小坐标数值,以及遍历所述第二显存矩阵,确定各连通域在第二方向上的最大坐标数值和最小坐标数值;将所述各连通域在第一方向上的最大坐标数值和第二方向上的最大坐标数值确定为第一定位坐标,将所述各连通域在第一方向上的最小坐标数值和第二方向上的最小坐标数值确定为第二定位坐标;所述定位坐标包括所述第一定位坐标和第二定位坐标。
6、上述实施例中,在得到各连通域的坐标集合后,基于坐标集合创建表征各连通域分布的显存矩阵,根据显存矩阵能够快速确定各连通域在不同方向的最大值和最小值,以实现精确对每个连通域进行定位,相比于通过图像识别来确定连通域的方法,本技术的定位方法更加精确,能够在像素的级别对连通域进行定位。
7、在一些实施例中,所述基于所述第一坐标数值和所述第二坐标数值,生成表征各连通域在第一方向上位置的第一显存矩阵和表征各连通域在第二方向上位置的第二显存矩阵,包括:设置元素均为预设数值的第一初始矩阵和第二初始矩阵;其中,所述第一初始矩阵和所述第二初始矩阵的行数等于所述连通域标记图中连通域的数量,所述第一初始矩阵的列数与所述连通域标记图中第一方向的像素数量相同,所述第二初始矩阵的列数与所述连通域标记图中第二方向的像素数量相同;从所述第一初始矩阵的第一行起,依次对一个连通域在第一方向上的第一坐标数值和所述第一初始矩阵中的一行元素进行替换,最终得到第一显存矩阵;从所述第二初始矩阵的第一行起,依次对一个连通域在第二方向上的第二坐标数值和所述第二初始矩阵中的一行元素进行替换,最终得到第二显存矩阵。
8、上述实施例中,通过显存矩阵能快速确定每个连通域在第一方向和第二方向的分布,进而快速对连通域进行定位。
9、在一些实施例中,所述基于所述定位坐标,确定各连通域的定位框,包括:将各连通域对应的所述第一定位坐标和所述第二定位坐标,确定为各连通域对应的定位框的对角点;基于各连通域的对角点,得到各连通域的定位框。
10、上述实施例中,在确定出连通域的定位坐标后,可以得到连通域的定位框,通过定位框可以直观的确定连通域的面积,以为后续对连通域的处理提供参考。
11、在一些实施例中,所述图形处理器包括预先分配的多个线程;所述对所述连通域标记图中各连通域中的像素进行定位,确定各连通域在图像坐标系上的至少一个像素坐标集合,包括:基于所述多个线程,对各连通域中像素的位置进行读取,分别确定各连通域中的像素在所述图像坐标系上第一方向的第一坐标和第二方向的第二坐标;基于所述第一坐标和所述第二坐标,生成各连通域在图像坐标系上的像素坐标集合。
12、上述实施例中,基于图形处理器的多个线程来确定每个像素的坐标,并行处理多个计算任务,可以同时确定全部连通域中的像素坐标,使得本技术实施例提供的定位方法相比于cpu定位更加快速,在产线上能够更快的确定出产线上具有表面缺陷的工件。
13、在一些实施例中,所述定位方法还包括:获取待定位二值图像;从所述待定位二值图像的第一个像素起,对所述待定位二值图像中的全部像素进行排序处理,确定所述全部像素分别对应的像素数值;对所述待定位二值图像进行连通域标记,确定至少一个连通域和所述至少一个连通域的连通域数量,并基于所述像素数值分别确定各连通域对应的根像素;基于所述各连通域对应的根像素和所述连通域数量,对各连通域进行标记处理,得到各连通域分别对应的标记值;基于所述各连通域分别对应的标记值,对所述待定位二值图像中除所述连通域外的像素进行置零处理,得到所述连通域标记图。
14、上述实施例中,通过图形处理器的并行计算,能够快速确定待定位二值图像中的连通域和连通域数量,并对连通域进行标记,减少了处理器的计算量,提升了产线程序运行的流畅度。
15、在一些实施例中,所述对所述待定位二值图像进行连通域标记,确定至少一个连通域和所述至少一个连通域的连通域数量,并基于所述像素数值分别确定各连通域对应的根像素,包括:从所述待定位二值图像的第一个像素起,将相邻且像素灰度值等于预设灰度值的像素确定为一个连通域,得到所述至少一个连通域;基于所述至少一个连通域,对连通域的数量进行统计,得到所述至少一个连通域的连通域数量;基于所述像素数值,从所述待定位二值图像的第一个连通域起,将各连通域对应的全部像素数值中数值最小的像素,确定为所述连通域的根像素,直至得到各连通域对应的根像素。
16、在一些实施例中,所述图形处理器至少包括预先设置的存储显存和多个线程;所述存储显存用于存储所述连通域数量;所述基于所述各连通域对应的根像素和所述连通域数量,对各连通域进行标记处理,得到各连通域分别对应的标记值,包括:从所述至少一个连通域的任一根像素起,所述任一根像素对应的线程读取所述存储显存中的所述连通域数量,将所述连通域数量作为所述任一连通域的标记值;对所述连通域数量执行减法操作,得到更新后的存储数值,并将所述存储显存中存储的所述连通域数量替换为所述更新后的存储数值;其中,所述减法操作为对所述连通域数量减去预设数值;所述任一根像素的下一根像素对应的线程读取所述存储显存中的所述更新后的存储数值,并将所述更新后的存储数值确定所述下一根像素对应的连通域的标记值,对所述更新后的存储数值进行减法操作,得到再次更新后的存储数值,将所述再次更新后的存储数值对所述更新后的存储数值进行替换,直至得到各连通域分别对应的标记值。
17、上述实施例中,基于图形处理器的多个线程来对图像的连通域进行标记,相比于cpu定位更加快速,提升了连通域定位效率。
18、第二方面,本技术实施例提供一种图形处理器,所述图形处理器包括:获取模块,用于获取包含至少一个连通域的连通域标记图;定位模块,用于对所述连通域标记图中各连通域中的像素进行定位,确定各连通域在图像坐标系上的至少一个像素坐标集合;所述像素坐标集合的数量与所述连通域的数量相同;生成模块,用于基于所述至少一个像素坐标集合中各像素坐标集合中的像素坐标,生成表征各连通域在所述连通域标记图上位置的显存矩阵;数据处理模块,用于对所述显存矩阵进行数据处理,得到各连通域对应的定位坐标;确定模块,用于基于所述定位坐标,确定各连通域的定位框,以对所述连通域标记图上的至少一个连通域进行定位。
19、上述实施例中,在获取连通域标记图之后,基于gpu对连通域标记图中各连通域中的像素进行定位,确定出各连通域对应的定位坐标,从而确定出各连通域的定位框,如此,基于gpu实现了图像的连通域定位,能够快速确定出极片等工件表面的缺陷,在极片进入卷绕前去除了有缺陷的极片,提高了电芯的良率;还减少了产线上cpu的计算量,减少了产线上程序运行卡顿的情况,提升了产线运行效率。
20、第三方面,本技术实施例提供一种连通域定位设备,包括存储器和图形处理器,所述存储器存储有可在图形处理器上运行的计算机程序,所述图形处理器执行所述程序时实现上述的连通域定位方法。
21、第四方面,本技术实施例提供一种计算机可读存储介质,其上存储有可执行指令,用于引起图形处理器执行所述可执行指令时,实现上述的连通域定位方法。
22、第五方面,本技术实施例提供一种生产线,所述生产线包括:上位机,用于发出对产线上的工件进行表面检测的检测请求;图像采集设备,用于响应于所述检测请求,采集产线上工件的表面图像;连通域定位设备,用于获取所述表面图像,形成连通域标记图,并基于所述连通域标记图实现上述的连通域定位方法。
23、上述实施例中,通过图形处理器实现连通域定位方法,不仅减少了产线上cpu的计算量,还减少了产线上程序运行卡顿的情况,提升了产线运行效率。
24、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!