一种农作物生长状况的监测方法与流程
本发明涉及农作物监测领域,具体为一种农作物生长状况的监测方法。
背景技术:
1、在种植山葵等生长条件较为严格且价格相对高昂的农作物时,需要保持对该类珍贵农作物的良好监测以保证其成活率,从而获取更好的经济效益,而叶片作为农作物光合作用的重要器官,可以直接反映农作物生长过程的多种生长状况,因此通过监测农作物叶片的卷曲状态来判断农作物的生长状况是否正常显得十分重要。
2、目前检测农作物叶片卷曲状态的方法主要是通过人工和图像识别的方法,人工的方法比较浪费人力,图像识别的方法一般通过bp神经网络等算法实现对图像中叶片卷曲部位的提取,从而用来判断叶片的卷曲程度,但是这种方法在使用时难以对被卷曲叶片遮挡部位的准确识别,从而也难以准确判断叶片的卷曲状态。
技术实现思路
1、针对现有技术的不足,本发明提供了一种农作物生长状况的监测方法,解决了现有技术中由于叶片部分位置被卷曲后的叶片遮挡,导致难以准确判断叶片卷曲程度的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种农作物生长状况的监测方法,包括:
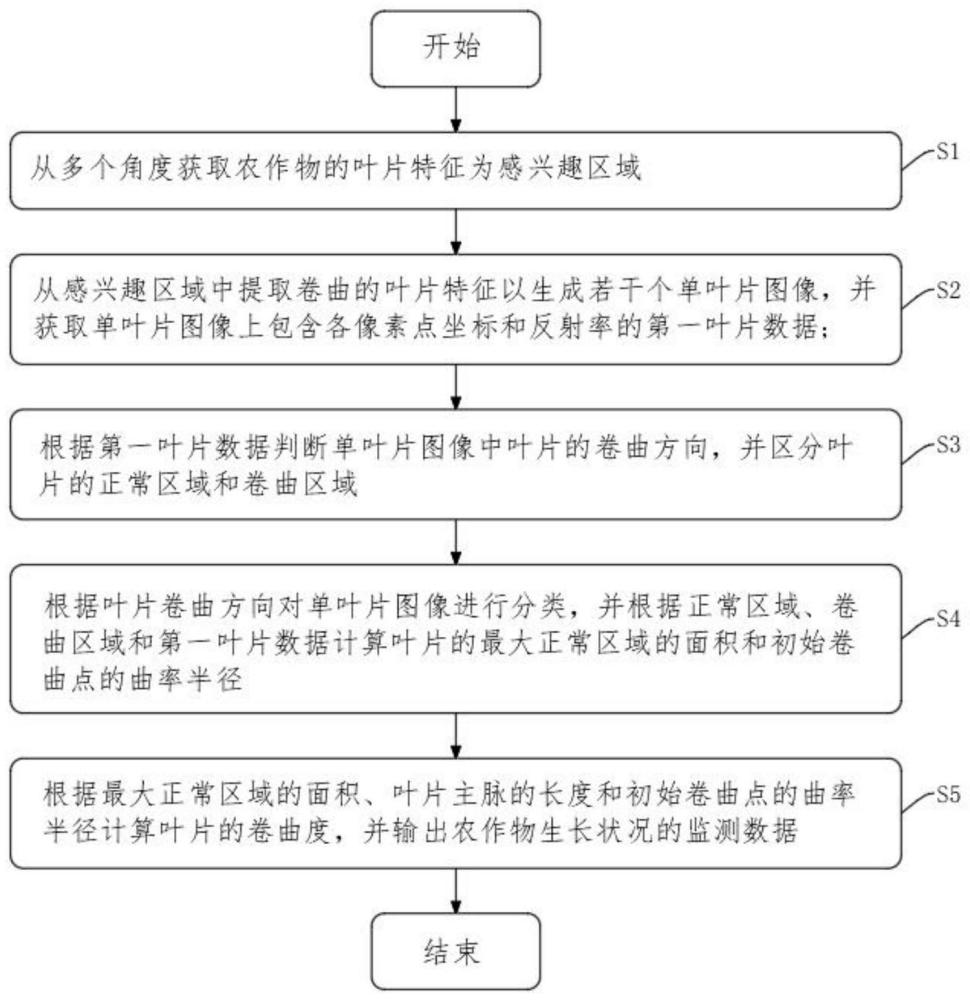
4、s1、从多个角度获取农作物的叶片特征为感兴趣区域;
5、s2、从感兴趣区域中提取卷曲的叶片特征以生成若干个单叶片图像,并获取单叶片图像上包含各像素点坐标和反射率的第一叶片数据;
6、s3、根据第一叶片数据判断单叶片图像中叶片的卷曲方向,并区分叶片的正常区域和卷曲区域;
7、s4、根据叶片卷曲方向对单叶片图像进行分类,并根据正常区域、卷曲区域和第一叶片数据计算叶片的最大正常区域的面积和初始卷曲点的曲率半径;
8、s5、根据最大正常区域的面积、叶片主脉的长度和初始卷曲点的曲率半径计算叶片的卷曲度,并输出农作物生长状况的监测数据。
9、作为优选,在步骤s3中,具体包括如下步骤:
10、s31、根据第一叶片数据计算单叶片图像中各个相邻像素点的反射率的反射差;
11、反射差的计算公式为:
12、σ(i,i+1)=r(i)-r(i+1)
13、上式中,σ(i,i+1)表示像素点i和与其相邻的其中一个像素点i+1的反射率的反射差,r(i)表示第像素点i的反射率,r(i+1)表示与像素点i相邻的一个像素点的反射率;
14、s32、根据任一像素点的反射差,判断叶片的卷曲方向;
15、若反射差大于第一阈值,则该叶片向上卷曲;
16、若反射差小于或等于第一阈值,则该叶片向上卷曲;
17、s33、根据任一像素点的反射差,判断该像素点是否处于卷曲区域;
18、若反射差大于第二阈值,则该像素点处于卷曲区域;
19、若反射差小于或等于第二阈值,则该像素点处于卷曲区域;
20、s34、重复步骤s33依次辨别单叶片图像中的所有像素点,以获得正常区域和若干个卷曲区域。
21、作为优选,在步骤s4中,具体包括如下步骤:
22、s41、转动单叶片图像中的叶片特征使正常区域所在平面与遥感设备镜头光轴垂直以生成转动图像,并获取包含各像素点坐标、入射角、反射率、叶片主脉和叶片最大边界线的第二叶片数据;
23、s42、将转动图像根据叶片卷曲方向分类标记为下卷叶片图像和上卷叶片图像;
24、s43、依次获取下卷叶片图像并计算正常区域的面积即为最大正常区域的面积,并计算卷曲区域与最大正常区域相邻的像素点的曲率半径;
25、s44、依次获取上卷叶片图像,并根据第二叶片数据分别获取卷曲区域与最大边界的重合线;
26、s45、依次在卷曲区域处建立若干个与正常区域所在平面和重合线均垂直的参考面;
27、s46、根据第二叶片数据拟合计算叶片卷曲区域在参考面上的卷曲曲线;
28、s47、根据卷曲曲线计算卷曲区域的初始卷曲点和该点处的曲率半径;
29、s48、拟合若干个初始卷曲点以获得初始卷曲线;
30、s49、提取由若干个初始卷曲线和叶片最大边界线所围成的最小封闭区域即为最大正常区域,并计算该区域的面积。
31、作为优选,在步骤s41中,具体包括如下步骤:
32、s411、在正常区域中选取任一像素点作为参考点,并根据第一叶片数据计算参考点的入射角;入射角与反射率满足下列表达式:
33、r(α)=r0+(1-r0)(1-cosα)5
34、上式中,r(α)表示入射角为α时的反射率,r0表示入射角为0时的反射率,α表示光线照射到参考点后被遥感设备接收的入射角;
35、s412、以参考点为转动基点,转动单叶片图像中的叶片特征使参考点的入射角为0以生成转动图像;
36、s413、根据第一叶片数据计算转动图像中各像素点的入射角;转动图像中各像素点的入射角的计算公式为:
37、
38、上式中,θ表示转动图像中任一像素点的入射角,β和γ表示单叶片图像围绕遥感设备坐标系的x轴和y轴方向转动的角度,根据转动方向定义正负,α为转动图像中任一像素点在转动操作前的入射角,即该像素点位于单叶片图像中时的入射角;
39、s414、根据转动图像中各像素点的入射角计算该像素点的反射率;
40、s415、将转动图像中各像素点坐标、入射角、反射率、叶片主脉和叶片最大边界线作为第二叶片数据。
41、作为优选,在步骤s46中,具体包括如下步骤:
42、s461、根据第二叶片数据获取卷曲区域内位于参考面上的入射角为0的像素点,并标记为基准点;
43、s462、对参考面上位于基准点靠近叶片主脉一侧的卷曲区域像素点的入射角取相反数;
44、s463、从参考面上选取若干个像素点,计算若干个像素点所对应的曲率半径;曲率半径的计算公式为:
45、
46、上式中,ri表示像素点i处的曲率半径,lij表示像素点i和与其相邻的像素点j之间的距离,θi表示像素点i处的入射角,θj表示像素点j处的入射角;
47、s464、根据若干个像素点的入射角和曲率半径拟合获得卷曲区域在参考面上的卷曲曲线;
48、卷曲曲线的表达式为:
49、r=a+bθ
50、上式中,r表示曲率半径,a和b均为系数,θ表示入射角的角度。
51、作为优选,在步骤s47中,具体包括如下步骤:
52、s471、在正常区域上选取任一入射角大于0的像素点作为辅助点;
53、s472、根据辅助点与参考点的入射角分别建立直线方程并计算两个直线方程的交点为遥感设备的焦点;直线方程的表达式为:
54、ax+by+cz+d=0
55、其中,
56、
57、上式中,a、b、c和d均为系数,θ表示入射角,将辅助点和参考点的坐标分别带入上述方程即可获得两个直线方程,再通过联立求解即可获得焦点坐标;
58、s473、连接焦点和基准点,并将其投影到参考面上以获得投影连接线,并计算投影连接线与正常区域所在平面的倾角;倾角的表达式为:
59、
60、上式中,δ表示基准线的倾角,x2和y2分别表示焦点的x轴和y轴的坐标值,x1和y1分别表示基准点的x轴和y轴的坐标值;
61、s474、根据倾角和卷曲曲线计算叶片初始卷曲点的曲率半径;初始卷曲点的曲率半径满足下列关系式:
62、r=a+b(π+δ)
63、上式中,r表示曲率半径的大小,a和b为系数,π+δ表示基准点沿着横截面曲线方向移动的夹角,δ为基准线的倾角,规定基准点移动时从靠近横截面曲线中心的位置向外侧方向移动;
64、s475、根据初始卷曲点的曲率半径和卷曲曲线计算初始卷曲点的坐标;初始卷曲点的坐标表达式为:
65、
66、上式中,x和y分别表示初始卷曲点的x轴和y轴坐标,a和b为系数,δ为投影连接线的倾角。
67、作为优选,在步骤s5中,具体包括如下步骤:
68、s51、根据最大正常区域的面积、叶片主脉的长度和曲率半径计算叶片的卷曲度;
69、s52、划分若干个级别的重要区间;
70、s53、输出包含卷曲度、卷曲方向和重要区间级别的农作物生长状况的监测数据。
71、作为优选,在步骤s51中,卷曲度的计算公式为:
72、
73、上式中,p为叶片的卷曲度,s表示最大正常区域的面积,l表示叶片主脉的长度,r表示初始卷曲点的曲率半径,a表示面积重要程度因子,b表示长度重要程度因子,c表示曲率半径重要程度因子。
74、与现有技术相比,本发明提供了一种农作物生长状况的监测方法,具备以下有益效果:
75、1、本发明通过快速识别获取出现卷叶的单叶片图像,随后对单叶片图像进行旋转以获得旋转图像,之后再根据叶片的卷曲方向对旋转图像进行分类,对于叶片下卷的图像直接提取最大正常区域并计算其面积和曲率半径,而对于叶片发生上卷的叶片,则通过卷曲曲线来预测其初始卷曲线的位置,随后计算其最大面积和曲率半径,从而在叶片部分位置被卷曲区域遮挡的情况下,也实现了对叶片卷曲方向和卷曲程度的有效识别,最后通过统一的方式计算出叶片的卷曲度,为种植户种植措施的改变提供参考。
76、2、本发明在对单叶片图像进行转动时,变相的调整了遥感设备镜头与叶片的相对位置,因此也同步的更新旋转图像上各像素点的入射角和反射率,方便后续拟合卷曲曲线时直接进行使用。
77、3、本发明通过设置若干个参考面,以获得卷曲区域内位于参考面上的若干个像素点,并通过像素点的反射率、入射角和曲率半径拟合获得卷曲曲线的方程,并通过卷曲曲线的方程计算其在初始卷曲线处的曲率半径,从而使上卷叶片和下卷叶片都能够获得在初始卷曲线处的曲率半径,方便进行对比,同时通过初始卷曲线也方便计算下卷叶片的最大正常区域的面积。
- 还没有人留言评论。精彩留言会获得点赞!