基于边缘检测的大型建筑毁伤图像重构方法及系统
【】本发明涉及计算机技术及软件领域,尤其是基于边缘检测的大型建筑毁伤图像重构方法及系统。
背景技术
0、
背景技术:
1、当自然灾害来临时,居民楼、机场候机厅等重要建筑物遭受损伤或损毁,为了能够更好地评估毁伤情况,需要对人造大型建筑毁伤情况进行视频或图像采集。在人造大型建筑毁伤的图像特征提取时,通常是通过边缘检测的方式实现。但是在不同尺度下图像显示不同特征的边缘信息,小尺度时,图像的边缘细节信息较为丰富,边缘定位精度较高,但是易受到噪声的干扰;大尺度时,图像的边缘稳定,抗噪性好,但是精度相对较差。现有技术无法解决噪声和精度之间的矛盾。
技术实现思路
0、
技术实现要素:
1、本发明提供了基于边缘检测的大型建筑毁伤图像重构方法及系统,用以解决在人造大型建筑毁伤的图像特征提取时,现有技术无法平衡噪声和精度之间矛盾的问题。
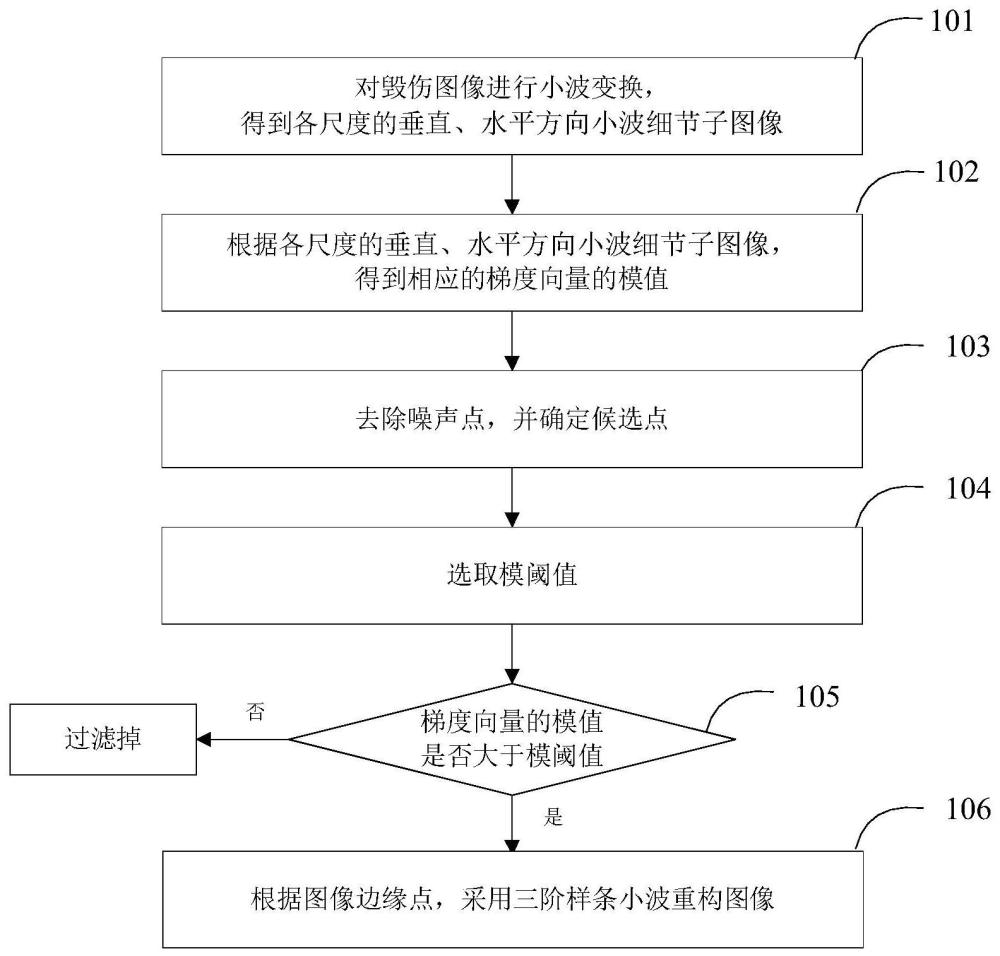
2、本发明实施例的基于边缘检测的大型建筑毁伤图像重构方法,包括下列步骤:s1、对毁伤图像进行小波变换,得到各尺度的和s2、根据所述各尺度的和得到相应的梯度向量的模值;s3、去除噪声点,并确定候选点;s4、选取模阈值;s5、若当前候选点的所述梯度向量的模值大于所述模阈值,则判定该候选点是图像边缘点,否则判定不是图像边缘点;s6、根据所述的图像边缘点,采用三阶样条小波重构图像。
3、优选的,步骤s1所述的对毁伤图像进行小波变换,具体得到的二维空间域的离散形式为:
4、
5、其中,f(x,y)为原始图像,x,y为原始图像的x轴与y轴的图像像素位置,为f(x,y)在分辨率j下的离散概貌,当j=0时,s20f(x,y)=f(x,y),即为原始图像;为图像垂直方向小波细节子图像,为图像水平方向小波细节子图像,k1为图像垂直方向采样点数,k2为图像水平方向采样点数,hk1为可分离滤波器h在图像垂直方向取值,hk2为可分离滤波器在图像水平方向取值,gk2为可分离滤波器g在图像垂直方向取值,gk1为可分离滤波器g在图像水平方向取值。
6、优选的,步骤s2所述得到相应的梯度向量的模值,具体是得到沿x,y方向的小波系数,通过下述公式(2)得到表示最大灰度变化强度的梯度矢量模板和表示最大灰度变化方向的幅角,作为所述梯度向量的模值;
7、
8、其中,为最大灰度变化强度的梯度矢量模板,为最大灰度变化方向的幅角。
9、优选的,步骤s3中所述的去除噪声点,具体是设置第一阈值,将随尺度增加梯度向量的模极大值小于所述第一阈值的点作为噪声点并去除;步骤s3中所述的确定候选点,具体是设置第二阈值,取0~j尺度上小于所述第二阈值的点作为候选点。
10、优选的,步骤s5中还包括:去除所述不是图像边缘点的点。
11、本发明另一实施例的基于边缘检测的大型建筑毁伤图像重构系统,包括:小波变换单元,用于对毁伤图像进行小波变换,得到各尺度的和模值单元,用于根据所述各尺度的和得到相应的梯度向量的模值;候选点单元,用于去除噪声点,并确定候选点;模阈值单元,用于选取模阈值;图像边缘点判定单元,用于若当前候选点的所述梯度向量的模值大于所述模阈值,则判定该候选点是图像边缘点,否则判定不是图像边缘点;图像重构单元,用于根据所述的图像边缘点,采用三阶样条小波重构图像。
12、优选的,所述小波变换单元对毁伤图像进行小波变换,具体得到的二维空间域的离散形式为:
13、
14、其中,f(x,y)为原始图像,x,y为原始图像的x轴与y轴的图像像素位置,为f(x,y)在分辨率j下的离散概貌,当j=0时,s20f(x,y)=f(x,y),即为原始图像;为图像垂直方向小波细节子图像,为图像水平方向小波细节子图像,k1为图像垂直方向采样点数,k2为图像水平方向采样点数,hk1为可分离滤波器h在图像垂直方向取值,hk2为可分离滤波器在图像水平方向取值,gk2为可分离滤波器g在图像垂直方向取值,gk1为可分离滤波器g在图像水平方向取值。
15、优选的,所述模值单元得到相应的梯度向量的模值,具体是得到沿x,y方向的小波系数,通过下述公式(4)得到表示最大灰度变化强度的梯度矢量模板和表示最大灰度变化方向的幅角,作为所述梯度向量的模值;
16、
17、其中,为最大灰度变化强度的梯度矢量模板,为最大灰度变化方向的幅角。
18、优选的,所述候选点单元设置第三阈值,将随尺度增加梯度向量的模极大值小于所述第三阈值的点作为噪声点并去除;设置第四阈值,取0~j尺度上小于所述第四阈值的点作为候选点。
19、优选的,所述图像边缘点判定单元还去除所述不是图像边缘点的点。
20、本发明的基于边缘检测的大型建筑毁伤图像重构方法及系统,采用多尺度特征提取的基本思路,沿着梯度方向分别用几个不同尺度的边缘特征检测算子,在相应点上检测模极大值的变换情况,通过对阈值的选取,在不同尺度上进行综合,得到边缘图像,较好的解决噪声和精度之间的矛盾。
技术特征:
1.基于边缘检测的大型建筑毁伤图像重构方法,其特征在于,包括下列步骤:
2.如权利要求1所述的基于边缘检测的大型建筑毁伤图像重构方法,其特征在于,步骤s1所述的对毁伤图像进行小波变换,具体得到的二维空间域的离散形式为:
3.如权利要求2所述的基于边缘检测的大型建筑毁伤图像重构方法,其特征在于,步骤s2所述得到相应的梯度向量的模值,具体是得到沿x,y方向的小波系数,通过下述公式(2)得到表示最大灰度变化强度的梯度矢量模板和表示最大灰度变化方向的幅角,作为所述梯度向量的模值;
4.如权利要求3所述的基于边缘检测的大型建筑毁伤图像重构方法,其特征在于,步骤s3中所述的去除噪声点,具体是设置第一阈值,将随尺度增加梯度向量的模极大值小于所述第一阈值的点作为噪声点并去除;
5.如权利要求3所述的基于边缘检测的大型建筑毁伤图像重构方法,其特征在于,步骤s5中还包括:去除所述不是图像边缘点的点。
6.基于边缘检测的大型建筑毁伤图像重构系统,其特征在于,包括:
7.如权利要求6所述的基于边缘检测的大型建筑毁伤图像重构系统,其特征在于,所述小波变换单元对毁伤图像进行小波变换,具体得到的二维空间域的离散形式为:
8.如权利要求7所述的基于边缘检测的大型建筑毁伤图像重构系统,其特征在于,所述模值单元得到相应的梯度向量的模值,具体是得到沿x,y方向的小波系数,通过下述公式(4)得到表示最大灰度变化强度的梯度矢量模板和表示最大灰度变化方向的幅角,作为所述梯度向量的模值;
9.如权利要求8所述的基于边缘检测的大型建筑毁伤图像重构系统,其特征在于,所述候选点单元设置第三阈值,将随尺度增加梯度向量的模极大值小于所述第三阈值的点作为噪声点并去除;设置第四阈值,取0~j尺度上小于所述第四阈值的点作为候选点。
10.如权利要求8所述的基于边缘检测的大型建筑毁伤图像重构系统,其特征在于,所述图像边缘点判定单元还去除所述不是图像边缘点的点。
技术总结
本发明提供了基于边缘检测的大型建筑毁伤图像重构方法及系统,用以解决在人造大型建筑毁伤的图像特征提取时,现有技术无法平衡噪声和精度之间矛盾的问题。方法包括:对毁伤图像进行小波变换,得到各尺度的和根据所述各尺度的和得到相应的梯度向量的模值;去除噪声点,并确定候选点;选取模阈值;若当前候选点的所述梯度向量的模值大于所述模阈值,则判定该候选点是图像边缘点,否则判定不是图像边缘点;根据图像边缘点,采用三阶样条小波重构图像。系统包括:小波变换单元、模值单元、候选点单元、模阈值单元、图像边缘点判定单元、图像重构单元。本发明较好的解决噪声和精度之间的矛盾。
技术研发人员:杨晨光,谢智歌,赵磊,刘爱志
受保护的技术使用者:中国人民解放军军事科学院战争研究院
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!