一种动力电池表面缺陷视觉检测图像预处理方法
本发明涉及动力电池缺陷检测、机器视觉,尤其涉及一种动力电池表面缺陷视觉检测图像预处理方法。
背景技术:
1、动力电池是目前新能源汽车的主要能源模块,电池模组的质量检测是整个产业中的重要步骤,其中表面缺陷检测是质量检测范围内的一个重要环节,会影响后续的使用及其性能[1],在产品瑕疵检测应用中起着日益重要的作用[2]。刘铖铖[3]等人利用改进的canny算子检测太阳能电池表面的蓝斑、磨损、缺角等局部缺陷,相比于一些传统的常规算法,该算法具有更好的噪声处理性能和准确率。夏庆国[4]等人采用光学超精密激光扫描的方法,对新能源汽车电池表面进行缺陷检测,具有高精度、抗噪声强、高鲁棒性等优点。chenyong-gang[5]等人采用hough缺陷检测方法,对锂电池表面的凹坑、锈痕、破皮等缺陷进行检测。
2、在动力电池模组的pack线中,由于动力电池模组较大的尺寸(5800mm×3200mm×3500mm),较小以及较浅的表面缺陷将在pack线中被定义为无影响缺陷,其对于外观产生一些轻微影响,但却对其后续使用和安装几乎没有实际影响。在上述方法中,虽然针对电池表面缺陷的检测表现出良好的效果,但无法获取电池表面的深度信息。对动力电池而言,其表面缺陷缺陷在一定宽度和长度的情况下,用二维相机采集出的图像是相同的,无法体现出目标缺陷深度,也就无法区分其是否是无影响缺陷,需要进行人工二次检查,从而造成人力和时间的浪费[6]。
3、参考文献:
4、[1]刘佳,刘孝保,阴艳超,等.面向不均衡样本空间的工件表面缺陷检测方法[j].机械科学与技术,2022,41(5):755-763.
5、[2]andersen m r,jensen t,lisouski p,et al.kinect depth sensorevaluation for computer vision applications[j].technical report electronicsand computer engineering,2012,1(6):37.
6、[3]刘铖铖,刘立群,焦秀华,等.改进canny算子的太阳能电池表面缺陷检测[j].太原科技大学学报,2021,42(4):255-260.
7、[4]夏庆国,刘呈呈.基于光学超精密检测的新能源汽车电池表面缺陷检验[j].激光杂志,2020,41(11):188-192.
8、[5]chen y,shu y,li x,et al.research on detection algorithm of lithiumbattery surface defects based on embedded machine vision[j].journal ofintelligent&fuzzy systems,2021,41(3):4327-4335.
9、[6]许长路,李林升,立济伟.基于gamma矫正与log算法融合的锂电池极片缺陷检测方法[j].机械设计与研究,2020,36(6):105-109.
10、[7]chen h,chen w,zuo y,et al.pointms:semantic segmentation for pointcloud based on multi-scale directional convolution[j].international journalof control,automation,and systems,2022,20(10):3321-3334.
11、[8]wang nan.the use of bilinear interpolation filter to remove imagenoise[j].journal of physics.conference series,2022,2303(1):12089.
12、[9]hui z,yong-jian z,lei z,et al.fast color point cloud registrationbased on virtual viewpoint image[j].frontiers in physics,2022,10.。
技术实现思路
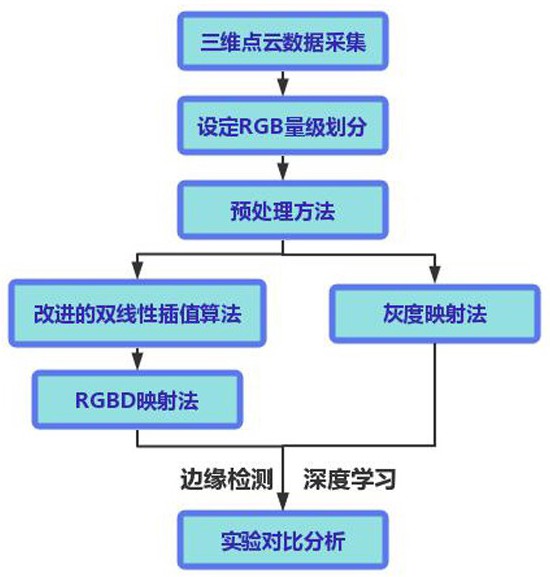
1、针对动力电池模组表面缺陷的深度不同特点,本发明提出一种动力电池表面缺陷视觉检测图像预处理方法,通过线结构光相机扫描表面得到的三维点云图,将其降维处理后通过改进的双线性插值法赋予深度信息,分为rgbd映射模型;然后基于传统二维图像处理技术以及深度学习模型训练;本发明还采用了灰色映射模型,用以对比两种不同方法的灰度化结果。最后进行缺陷边缘提取缺陷特征。实验结果表明:本发明方法能有效增强电池模组的表面深度变化较大的缺陷表现,同时淡化对动力电池无影响的深度1mm以下的表面轻微缺陷。
2、本发明所提出的rgbd映射模型,能够针对电池模组表面进行有针对性的缺陷识别,筛除其无影响缺陷。
3、其具体采用以下技术方案:
4、一种动力电池表面缺陷视觉检测图像预处理方法,其特征在于,通过线结构光相机扫描表面得到的三维点云图,将其降维处理后通过改进的双线性插值法赋予深度信息,获得rgbd映射模型,以此基于二维图像处理技术以及深度学习模型进行训练;所述改进的双线性插值法是在双线性插值的基础上,通过高斯加权平均法和差异平均法对像素值进行处理。
5、进一步地,根据rgb的特性,采用在单一通道的值在110以上进行变化的区域,将每个点的深度值映射到111到255的整数范围内,然后将rgb颜色值(r,g,b)经过所述改进的双线性插值算法拼接成整数值,再将该值赋给深度图像素。
6、进一步地,根据rgb量级划分表,通过下式将高度值转换成对应的颜色量级,以得到对应点的rgb三通道的值:
7、
8、式中,n为该点在表中的量级,nsegment表示颜色量级数目,zmax和zmin表示高度的最大值和最小值,zi为目标点云的点云高度数据。
9、进一步地,所述改进的双线性插值法具体为:
10、首先进行坐标映射,对像素值进行取整计算int():
11、
12、式中,a和b表示初始图像中的整数形坐标;和表示浮点数坐标;a,b分别表示插值图像中的整数坐标;scale则表示进行插值的倍率;
13、之后进行插值计算:
14、结合高斯加权平均法来进行权重因子的计算:
15、
16、其中λ和分别表示中心像素在水平和垂直方向上的权重,其中σx和σy分别表示在水平和垂直方向上的高斯标准差,之后结合权重因子进行目标区域像素值的计算:
17、
18、计算区域中邻近区域的像素值x1,x2,x3和x4,相加得到目标区域插值后的像素值y(a,b);
19、y(a,b)=x1+x2+x3+x4;
20、之后求出参数k,每个窗口中的最大像素值imax、最小像素值imin以及局域的平均强度iavg:
21、
22、如果该点当前像素值小于iavg,则:
23、in=y1-k
24、如果该点当前像素值大于iavg,则:
25、in=1-(1-y)1-k
26、由此得到rgbd映射模型中的单一通道的像素值;彩色映射模型中包含三个像素通道,因此分别计算每个通道对应的像素值。
27、相对于现有技术,本发明及其优选方案更好地实现了对缺陷的精准检测,其利用改进的双线性插值法,能提升在深度学习模型的训练和测试中缺陷识别的准确率,例如凹坑、划痕、焊点飞溅等进行准确的识别。同时双线性插值算法淡化了对电池模组后续生产和使用无影响的深度0.6mm的轻微缺陷。该方法针对动力电池模组的金属平面缺陷检测,能满足目前新能源产业对动力电池模组的检测要求,在其他产业也有不错的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!