一种Volterra双参协同智能优化混沌控制方法
本发明涉及电机控制,尤其是涉及一种volterra双参协同智能优化混沌控制方法。
背景技术:
1、永磁同步电机由于损耗小、功率因数高、效能高等优点,已经被应用于电动汽车、机器人等领域。但永磁同步电机是一个典型的非线性、多变量耦合系统,其参数会因为运转过程中内部工况(如温度)的改变而不稳定,在特定参数条件下会引起电机表现出混沌行为,导致永磁同步电机的运行质量和稳定性受到极大的干扰。所以,针对工程实践中的实际需要,对永磁同步电机系统中的混沌过程加以有效控制,可以实现该类系统的平稳动态行为,从而降低了因其不平稳动态行为而带来的无谓的经济损失,并延长设备的使用寿命,这是十分必要并富有现实工程效益的。
2、分岔和混沌是非线性问题中普遍存在的现象,是复杂的动力学行为。如果某个动力系统是结构不稳定,任意一点波动都会引起系统的结构突变,这种变化叫做分岔。
3、永磁同步电机的混沌运动是非线性系统特有的一种动力学性态,现有混沌控制方法包括参数调整控制法和反馈控制法,这两种方法均是非常成熟且应用广泛的控制方法。但是缺陷在于:如果控制系统需要一种比较准确的模型提供目标函数或者说是轨迹,并且仅提供观察数据信息而又缺乏具体化的模型时,参数调整控制法和反馈控制法都是不可直接利用的。工程实践中因为混沌体系的复杂性,体系的分析模型常常是不知或无法准确获取的,而且实际系统的参数也是变化的。因此相关技术缺少一种不依赖于控制对象准确模型,仅应用于控制系统的输入/输出数据以实现混沌系统的控制方法,将有着重要的基础理论科学研究价值和意义。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种控制效率高、能够降低控制器对人工干涉的依赖性的volterra双参协同智能优化混沌控制方法。
2、本发明的目的可以通过以下技术方案来实现:
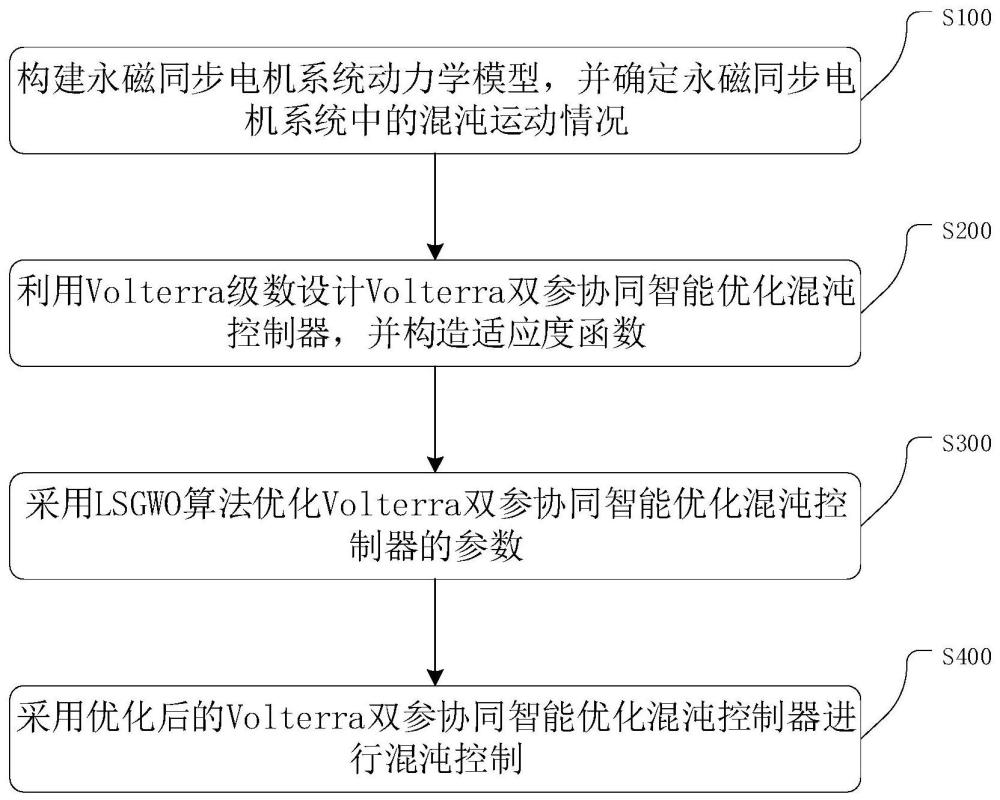
3、一种volterra双参协同智能优化混沌控制方法,该方法包括步骤:
4、构建永磁同步电机系统动力学模型,并确定所述永磁同步电机系统中的混沌运动情况;
5、利用volterra级数设计volterra双参协同智能优化混沌控制器,并构造适应度函数;
6、采用lsgwo算法优化所述volterra双参协同智能优化混沌控制器的参数;
7、采用优化后的所述volterra双参协同智能优化混沌控制器进行混沌控制。
8、作为优选的技术方案,所述构建永磁同步电机系统动力学模型,包括:
9、以定子d、q轴电流id、iq及转子角速度ω为状态变量,确定永磁同步电机系统在d-q坐标系下的状态方程为:
10、
11、其中,id和iq分别为定子d、q轴电流;ud和uq分别为定子d、q轴电压;ld和lq分别为定子d、q轴电感;ω为转子角速度;ψf为转子磁极磁链;tl为负载转矩;j和β分别为转动惯量和粘滞阻尼系数;r1为定子绕组电阻;np为极对数。
12、作为更加优选的技术方案,所述构建永磁同步电机系统动力学模型,还包括:
13、令对所述状态方程进行时间尺度变换和线性仿射变换,其中:
14、i=[id iq ω]t
15、
16、b=lq/ld
17、k=β/npτψf
18、τ=lq/r1,
19、
20、获得无量纲化的状态方程为:
21、
22、γ=ψf/klq
23、σ=βτ/j
24、
25、
26、
27、针对均匀气隙的永磁同步电动机的混沌特性进行研究,考虑ld=lq=l的情况,当时,令上述状态方程可等效为:
28、
29、作为优选的技术方案,所述确定所述永磁同步电机系统中的混沌运动情况,包括:
30、通过数值仿真绘制庞加莱截面上的混沌吸引子来研究所述永磁同步电机系统的运动特性;
31、若所述庞加莱截面表现为一点,且所述永磁同步电机系统的状态量在相空间的轨迹上表现为一条极环时,表明所述永磁同步电机系统处于极限环运动状态;
32、若所述庞加莱截面上仅有一个点或仅有第一预设个数阈值内的所述混沌吸引子,且所述永磁同步电机系统的状态量在相空间的轨迹表现为一条或多条闭合的曲线时,则所述永磁同步电机系统处于周期运动状态;
33、若所述庞加莱截面上具有多于第二预设个数阈值的所述混沌吸引子,且所述混沌吸引子均沿着一条封闭的曲线呈现时,所述永磁同步电机系统处于准周期运动状态;
34、若所述庞加莱截面上具有成片且带有分形特征结构的密集点,且所述永磁同步电机系统的状态量在相空间的轨迹变现为杂乱无序且不重叠也不交互的稠密轨道时,所述永磁同步电机系统处于混动运动状态。
35、作为优选的技术方案,所述利用volterra级数设计volterra双参协同智能优化混沌控制器,并构造适应度函数,包括:
36、基于volterra级数模型的三阶截断形式,利用所述永磁同步电机系统的输入、输出数据设计volterra双参协同智能优化混沌控制器以控制所述永磁同步电机系统的混沌状态。
37、作为优选的技术方案,所述volterra级数模型的三阶截断形式可表示为:
38、
39、
40、其中,m1、m2和m3均为有限项,h1(m1)为所述永磁同步电机系统的一阶volterra时域核;h2(m1,m2)为所述永磁同步电机系统的二阶volterra时域核;h3(0,0,0)为所述永磁同步电机系统的三阶volterra时域核,mi为记忆长度;
41、在设计所述volterra双参协同智能优化混沌控制器时,根据混动运动控制目标控制器的输入变量包括:
42、d(t)=||x(t)-x(t-1)||
43、d(t-1)=||x(t-1)-x(t-2)||
44、d(t-2)=||x(t-2)-x(t-3)||
45、d(t-3)=||x(t-3)-x(t-4)||
46、d(t-4)=||x(t-4)-x(t-5)||
47、上述输入变量分别代表相邻两个频闪采样点之间的距离;
48、将所述永磁同步电机系统的两个可控参数的微幅调整量作为所述volterra双参协同智能优化混沌控制器的输出。
49、作为优选的技术方案,所述采用lsgwo算法优化所述volterra双参协同智能优化混沌控制器的参数,包括:
50、采用基于离散迭代映射法建立所述永磁同步电机系统的频闪庞加莱映射,即每隔一个周期时间t,对所述永磁同步电机系统的各状态变量进行采样来确定系统动力学演化机理;
51、初始化所述volterra双参协同智能优化混沌控制器的参数,由所述volterra双参协同智能优化混沌控制器的参数组成灰狼种群;
52、对所述volterra双参协同智能优化混沌控制器进行初始训练获得volterra级数时域核h1(m1)、h2(m1,m2)、h3(0,0,0),进行实值编码后再采用混沌初始化得到初始灰狼个体;
53、对所述灰狼个体进行分类处理,计算灰狼个体适应度值;
54、对所述灰狼进行寻优更新;
55、根据lsgwo算法更新灰狼种群并利用适应度函数计算个体适应度值;
56、在满足结束条件时,输出灰狼群体中最优个体位置;
57、更新所述volterra双参协同智能优化混沌控制器的参数,通过更新后的所述volterra双参协同智能优化混沌控制器输出微小扰动来控制所述永磁同步电机系统。
58、作为更加优选的技术方案,所述对所述灰狼进行寻优更新,包括:
59、搜索狼的位置更新公式为:
60、
61、
62、其中,xalfa,xbeta和xdelta分别代表αw狼、βw狼和δw狼的位置矢量;xw为搜索狼的位置矢量;在下一次gwo算法搜索中,搜索狼的位置矢量被更新为xw(t+1);r1和r2的每个元素均是范围为[0,1]的随机值;参数a为一个逐渐减小的向量,其值从2到0随着搜索次数的增加而减小。
63、作为更加优选的技术方案,所述对所述灰狼进行寻优更新,还包括:
64、在搜索狼位置更新时引入莱维飞行策略,莱维飞行策略包括:
65、
66、其中,r3、r4均为[0,1]范围内的随机数;ξ为系数,值可以为1.5,θ计算方式如下:、
67、
68、其中,г(v)=(v-1)!。
69、作为更加优选的技术方案,所述对所述灰狼进行寻优更新,还包括:
70、在搜索狼位置更新时引入莱维飞行策略和精英选择策略,具体为:
71、由下式产生n维lévy随机数:
72、
73、其中,xilevy为经过莱维飞行策略更新后的搜索狼个体位置;xit为当前搜索狼个体位置;xibest为全局最优位置;levy(m)为lévy随机数;
74、便于灰狼个体更新位置后执行精英选择策略,使得新产生的灰狼个体向历史最优个体学习,即如果新的个体位置的适应值小于原来个体位置的适应值,或者搜索狼个体适应度排名位于所有个体排名的后1/3,则由下式产生新的灰狼个体位置:
75、
76、其中,xinewt为位置更新后新产生的个体位置;fit(xilevy)为莱维飞行策略更新后的搜索狼个体适应度;fit(xit)为当前搜索狼个体适应度;ifl(i)当前搜索狼个体适应度排名;partinum为搜索狼个体总数;
77、将新产生的个体位置代替原来搜索狼个体位置。
78、与现有技术相比,本发明具有以下优点:
79、控制效率高、能够降低控制器对人工干涉的依赖性:本发明中的volterra双参协同智能优化混沌控制方法利用不依赖于被控目标精细模型的volterra级数设计混沌控制器的,并利用lsgwo算法来优化混沌控制器的过程参数,通过对系统可控制参数进行微幅扰动,达到控制被控系统至预期状态的目的,针对预期控制目标,能够在很短的时间内于一定的目标轨迹上实现探索与稳定。
- 还没有人留言评论。精彩留言会获得点赞!