一种混合域矢量地图水印嵌入方法与提取方法
本发明涉及矢量地图水印,尤其是指一种混合域矢量地图水印嵌入方法与提取方法。
背景技术:
1、矢量地图是地理信息系统中的重要基础数据,在交通导航、城市规划和军事应用等各个行业中得到广泛应用。随着计算机技术的快速发展,许多gis应用程序的开发为普通用户提供了便捷的矢量地图访问方式。然而,这也带来了一些安全问题,例如泄漏和盗版。因此,矢量地图亟需技术保护的措施。数字水印是一种被广泛应用于图像、音频和视频等多媒体数据形式的版权保护方法,具有非常高效的效果。近年来,越来越多的矢量地图开始使用数字水印来保护数据,数字水印成为矢量地图版权保护的重要技术手段。
2、目前,针对矢量地图数字水印的研究重要方向之一是综合考虑水印信息的不可见性和水印算法的鲁棒性,寻找适合的水印嵌入域。一般根据水印嵌入的位置,矢量地图数字水印算法可以分为空间域和频率域数字水印算法。空间域数字水印算法通过直接修改坐标值的方式嵌入水印信息,而频率域数字水印算法先对矢量地图坐标序列作某种可逆的数学变换,然后通过修改变换系数实现水印嵌入,并通过逆变换得到嵌入水印的矢量地图。对于空间域数字水印算法,水印信息被直接隐藏在坐标层面,因此安全性较低,易被针对性攻击所擦除。而频率域数字水印算法在频率域系数中嵌入水印信息,安全性和实用性更高。然而,频率域数字水印算法难以控制误差,且算法的鲁棒性往往受限于频率域系数在各种攻击变换下的稳定性。
3、现有的基于频率域的数字水印算法,大都采用dft变换将矢量地图从空间域转换到频率域;在对比文献1“奚旭,张新长,鲍建腾,张亚洲,2022.一种改进dft和qr码的矢量地图数字水印算法.测绘科学47,190-197”中,其水印嵌入流程包括:提取矢量地图的坐标点,然后将坐标点序列构造复数序列;对所得复数序列执行dft变换,得到dft系数,随后计算dft系数的幅度系数;通过调制幅度系数中元素值的奇偶性实现水印信息的嵌入;执行逆离散傅里叶变换idft(inverse discrete fourier transform)得到嵌入水印后的矢量地图。在对比文献2“张黎明,闫浩文,齐建勋,张永忠,2015.基于dft的可控误差矢量空间数据盲水印算法.武汉大学学报(信息科学版)40,990-994”中,其水印嵌入流程包括:提取矢量地图的坐标点,然后将坐标点序列构造复数序列;应用dft将矢量地图转换至频率域,得到dft系数;计算dft的相位系数和幅度系数,通过量化索引调制的方式,同时在相位系数和幅度系数中嵌入水印信息;对矢量地图进行idft变换,最终得到嵌入水印信息的矢量地图。其中,矢量地图dft的幅度系数和相位系数中均嵌入了水印信息,在版权认证时,仅需其中一个水印图证明版权所属。
4、上述两个方法在矢量地图的版权保护中均得到了较好地应用,然而经过实验验证,两者仍存在明显的缺陷。对比文献1的算法主要是利用dft幅度系数的平移和旋转的不变性来获取水印算法对于几何攻击的鲁棒性。然而dft幅度系数在缩放变换下无法保持其稳定性,因此其对缩放攻击不存在鲁棒性。对比文献2的算法对dft的相位系数和幅度系数进行结合,进而嵌入多重水印,不同的水印负责抵抗不同类型的攻击,例如在相位系数中嵌入水印能够有效抵抗缩放,在幅度系数中嵌入水印可以有效抵抗旋转攻击。然而这种做法的缺陷也十分地明显,主要分为以下两个方面:1)攻击者对于矢量地图的攻击往往是多步骤的,如果攻击者在对矢量地图同时做平移、旋转、缩放、增删点攻击,该方法无法提取出有效的水印图;2)水印信息的嵌入会对矢量地图造成较大的干扰,不可见性较差。
5、综上所述,现有的频率域矢量地图数字水印算法,由于利用会受缩放变换影响的幅度系数以及受平移旋转影响的相位系数,来进行水印获取,存在着无法同时抵抗平移、旋转和缩放的几何攻击,对于组合攻击鲁棒性较差,且水印嵌入对矢量地图干扰较大。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中直接利用幅度系数与相位系数获取水印,导致矢量地图无法同时抵抗平移、旋转和缩放的几何攻击。
2、为解决上述技术问题,本发明提供了一种混合域矢量地图水印嵌入方法,包括:
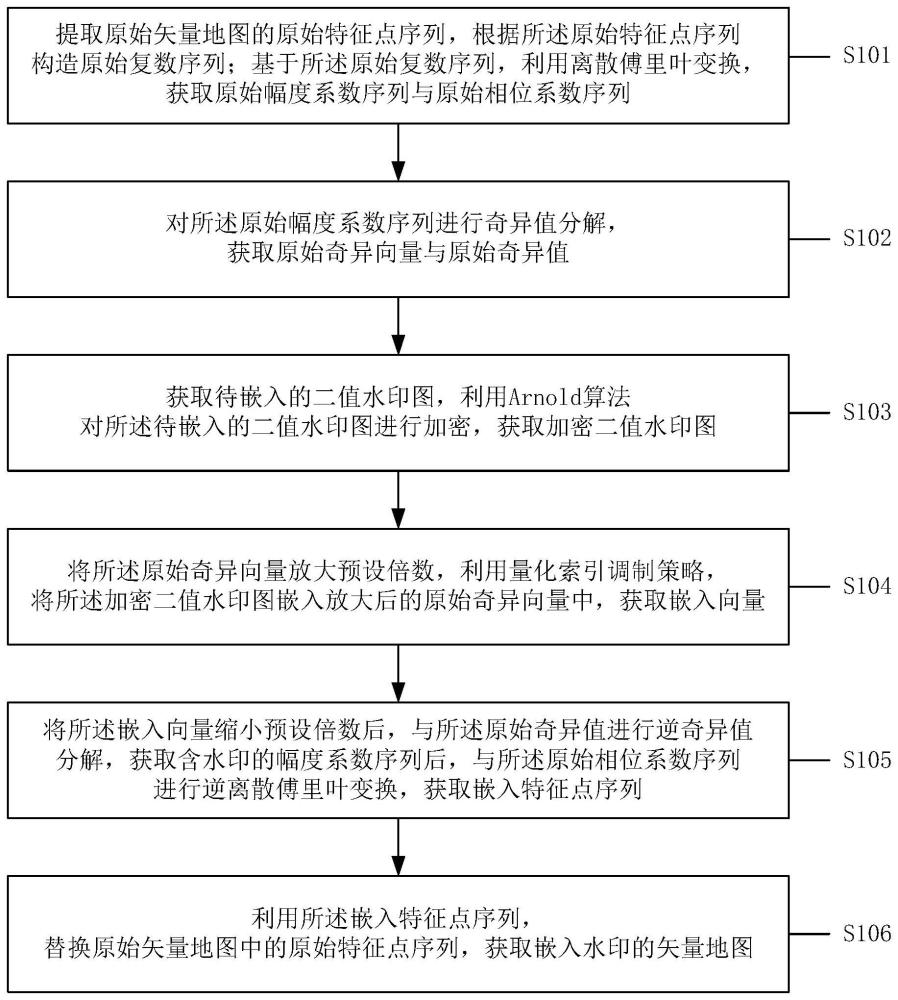
3、提取原始矢量地图的原始特征点序列,根据所述原始特征点序列构造原始复数序列;基于所述原始复数序列,利用离散傅里叶变换,获取原始幅度系数序列与原始相位系数序列;
4、对所述原始幅度系数序列进行奇异值分解,获取原始奇异向量与原始奇异值;
5、获取待嵌入的二值水印图,利用arnold算法对所述待嵌入的二值水印图进行加密,获取加密二值水印图;
6、将所述原始奇异向量放大预设倍数,利用量化索引调制策略,将所述加密二值水印图嵌入放大后的原始奇异向量中,获取嵌入向量;
7、将所述嵌入向量缩小预设倍数后,与所述原始奇异值进行逆奇异值分解,获取含水印的幅度系数序列后,与所述原始相位系数序列进行逆离散傅里叶变换,获取嵌入特征点序列;
8、利用所述嵌入特征点序列,替换原始矢量地图中的原始特征点序列,获取嵌入水印的矢量地图。
9、在本发明的一个实施例中,所述提取原始矢量地图的原始特征点序列,根据所述原始特征点序列构造原始复数序列,包括:
10、提取原始矢量地图的原始特征点序列;
11、将所述原始特征点序列输入道格拉斯-普克算法中,预设压缩阈值,计算获取原始矢量地图的原始特征点序列fe;
12、根据所述原始特征点序列构造原始复数序列c,表示为:
13、c={c0,c1,…,cj,...,cn-1};
14、其中,cj为原始复数序列中第j个特征点的复数形式,表示为cj=xj+yj*i,j=0,1,2,…,n-1,n表示原始复数序列中特征点的总个数;(xj,yj)表示原始复数序列中第j个特征点的坐标,i表示虚部单位。
15、在本发明的一个实施例中,所述基于所述原始复数序列,利离散傅里叶变换,获取原始幅度系数序列与原始相位系数序列,包括:
16、对所述原始复数序列c中每一个元素cj进行耦合离散傅里叶变换,获取傅里叶系数序列d,令n表示原始复数序列索引,m表示傅里叶系数索引,m与n一一对应,取值范围均为[0,1,2,…,n-1];
17、获取傅里叶系数序列中第m个索引位置处的傅里叶系数d(m),表示为:
18、
19、基于所述傅里叶系数序列d,获取序列中每个傅里叶系数的模长,得到原始幅度系数序列mag,原始幅度系数序列中第m个索引位置处的幅度系数mag(m),表示为:
20、
21、基于所述傅里叶系数序列d,获取序列中每个傅里叶系数的相位,得到原始相位系数序列pha,原始相位系数序列中第m个索引位置处的相位系数pha(m),表示为:
22、
23、其中,c(n)表示原始复数序列中第n个索引位置处的元素cj;dreal(m)表示第m个索引位置处的傅里叶系数的实数部分,dimag(m)表示第m个索引位置处的傅里叶系数的虚数部分。
24、在本发明的一个实施例中,所述原始奇异向量的获取,包括:
25、基于所述原始幅度系数序列,利用奇异值分解获取原始奇异向量ds(m),表示为:
26、
27、在本发明的一个实施例中,所述获取待嵌入的二值水印图,利用arnold算法对所述待嵌入的二值水印图进行加密,获取加密二值水印图,包括:
28、获取待嵌入的二值水印图w,利用arnold算法将所述待嵌入的二值水印图中的每个像素点的坐标按照预设规则进行置换,得到对应的加密像素点,表示为:
29、
30、所有的加密像素点,组成加密二值水印图we;
31、其中,(b',d')表示加密二值水印图we中的像素点坐标;(b,d)表示待嵌入的二值水印图w中的像素点坐标;z表示二值水印图中像素点的总个数;keyα,keyβ为预设正整数,表示arnold算法的密钥信息,mod表示求余。
32、在本发明的一个实施例中,所述将所述原始奇异向量放大预设倍数,利用量化索引调制策略,将所述加密二值水印图嵌入放大后的奇异向量中,获取嵌入向量,包括:
33、将所述原始奇异向量放大预设倍数k,表示为ds(m)×k;
34、初始化量化索引调制策略的步长q,将所述加密二值水印图we嵌入放大后的奇异向量中,获取嵌入向量ds'(m),表示为:
35、
36、其中,mod表示求余,wid为所嵌入水印位的索引值,表示为wid=mod[keyh×ds(j),q],keyh为水印预设密钥。
37、本发明实施例还提供了一种混合域矢量地图水印提取方法,包括:
38、获取基于如上述所述的混合域矢量地图水印嵌入方法得到的嵌有水印的矢量地图,为待检测矢量地图;
39、提取待检测矢量地图的当前特征点序列,根据所述当前特征点序列构造当前复数序列;基于所述当前复数序列,利用离散傅里叶变换,获取当前幅度系数序列;
40、对所述当前幅度系数序列进行奇异值分解,获取当前奇异向量;
41、利用投票机制获取当前奇异向量的水印位值及其索引值,生成当前加密水印图;
42、利用逆arnold算法对所述当前加密水印图进行解密,获取提取水印后的矢量地图。
43、在本发明的一个实施例中,所述利用投票机制获取当前奇异向量的水印位值及其索引值,包括:
44、初始化水印位集合为空集,表示为:
45、
46、初始化索引值集合为空集,表示为:vr=ir={rp|rp=0,p=0,1,…,wlen-1};
47、其中,ir(ird)=ir(ird)+1,索引信息ird=mod[keyh×k×ds"(j),q];ds"(j)表示当前奇异向量;wlen表示水印所占特征点的总个数;q表示量化索引调制策略的步长,k表示放大的预设倍数;keyh为预设密钥;ar(ird)表示水印位值,ar(m)表示水印位值为ird=m,ir(ird)表示水印索引值,ir′(m)表示水印索引值为m的水印个数。
48、在本发明的一个实施例中,所述当前加密水印图w'e,表示为:
49、
50、其中,ir′(m)表示水印索引值为m的水印个数。
51、在本发明的一个实施例中,所述利用逆arnold算法对所述当前加密水印图进行解密,获取提取水印后的矢量地图,包括:
52、
53、其中,(b',d')′表示当前加密水印图w'e中的像素点坐标;(b,d)′表示提取水印后的矢量地图w′中的像素点坐标;z表示当前加密水印图中像素点的总个数;keyα,keyβ为正整数,表示arnold算法的密钥信息,mod表示求余。
54、本发明的上述技术方案相比现有技术具有以下优点:
55、本发明所述的矢量地图水印嵌入方法,通过对傅里叶变换获取的幅度系数的平移旋转不变性优势与奇异值分解的奇异向量的缩放不变性优势进行耦合,利用量化索引调制策略,将嵌入幅度系数的奇异向量作为嵌入向量,来获取嵌入特征点,从而恢复出嵌入水印的矢量地图;本发明利用傅里叶变换与奇异值分解获取嵌入向量,能够同时抵抗平移、旋转和缩放的几何攻击,提高了组合攻击鲁棒性。本发明对奇异向量进行预设倍数的放大,保证水印有足够的空间可以嵌入到奇异向量中,同时保证原始特征点的特性不会被大幅度改变,减小了水印嵌入造成的误差,提高了矢量地图精度。
- 还没有人留言评论。精彩留言会获得点赞!