一种高轨星间近距目标单目视觉距离测量方法
本发明涉及单目视觉测距方法,具体涉及一种高轨星间近距目标单目视觉距离测量方法。
背景技术:
1、单目视觉测距一般采用对应点标定法来获取图像的深度信息,对应点标定法是指通过不同坐标系中对应点的对应坐标求解坐标系的转换关系,但对应点标定法,在标定过程中,会受器材限制,导致无法做到十分精确地记录一个点在世界坐标系和图像坐标系中的对应坐标,如果其坐标不够精确,那么得到的转换矩阵的精确度也会受到制约,坐标转换结果的精度也会因此而波动。由于对应点标定法对于摄像机的标定是在摄像机的各个角度及高度已经确定的情况下进行的,当摄像机的任何一个参数发生变化时,都要重新进行标定,以得到在该种具体情况下的转换矩阵,所以该方法仅适用于摄像机位置固定的情况,而对于应用在移动载体上的摄像机(如星载相机)来说,由于摄像机载体在运动过程中会使摄像机的参数发生变化,因此其适用性受到了限制,无法精确测距。
技术实现思路
1、本发明的目的是提供一种高轨星间近距目标单目视觉距离测量方法,以解决现有的单目视觉测距方法无法精确测量高轨星间距离的技术问题。
2、为了实现高轨星间近距目标单目视觉距离的精确测量,本发明提供了一种高轨星间近距目标单目视觉距离测量方法,用于测量卫星s与目标卫星t间的距离,其中,卫星s上安装有实时跟踪并指向目标卫星t的星载相机,所述星载相机具有星敏功能,其特殊之处在于,包括以下步骤:
3、步骤1、计算星敏感器坐标到天球坐标系的旋转矩阵mj2000;
4、根据天球坐标系到星敏感器坐标系旋转矩阵m,计算敏感器坐标到天球坐标系的旋转矩阵mj2000:
5、mj2000=mt;
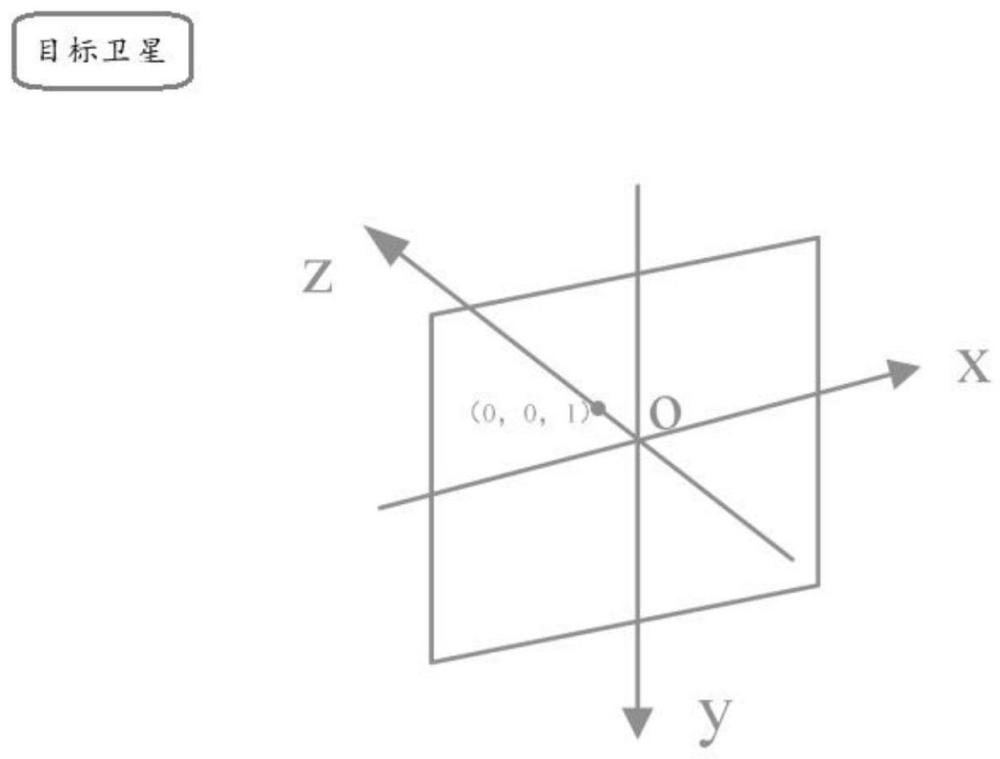
6、步骤2、计算星载相机视轴中心对目标卫星t的指向矢量vt;
7、vt=mj2000*[0,0,1]t;
8、步骤3、构建方程组;
9、在预设时间间隔内进行两次采样,获取由卫星s给出的卫星s从位置1运动到位置2时分别对应的两个位置在天球坐标系下的坐标为s1(xs1,ys1,zs1),s2(xs2,ys2,zs2);卫星s在位置1和位置2时分别对应目标卫星t的位置坐标为t1(xt1,yt1,zt1),t2(xt2,yt2,zt2);卫星s在位置1指向目标卫星t的位置1和卫星s在位置2指向目标卫星t在位置2时分别对应的指向矢量为v1(v1x,v1y,v1z)和v2(v2x,v2y,v2z);在所述预设时间间隔指的两次采样时间间隔内目标卫星在z轴方向运动距离近似为0,则zt1=zt2;
10、设未知系数k1和k2,通过构建卫星s在s1位置指向目标卫星t在t1位置的矢量v1方程、卫星s在s2位置指向卫星t在t2位置的矢量v2方程、目标卫星t在t1位置与t2位置的球上方程,求解k2的两个解d1abs和d2abs:
11、其中,所述矢量v1方程、矢量v2方程以及球上方程分别为:
12、k1*v1=s1-t1;
13、k2*v2=s2-t2;
14、xt1^2+yt1^2=xt2^2+yt2^2;
15、步骤4、求取距离;
16、基于步骤3求解出的两个解d1abs和d2abs,通过d=min(d1abs,d2abs)选取最小k2值,计算卫星s与目标卫星t的距离dlast:
17、dlast=d*sqrt(v2x^2+v2y^2+v2z^2)。
18、进一步地,所述卫星s位于地球静止轨道且带有一个固定倾角。
19、进一步地,所述固定倾角范围为0~0.1°。
20、进一步地,所述卫星s在偏心率为0时,其轨道为圆形。
21、进一步地,所述近距是指小于等于600km。
22、进一步地,所述预设时间间隔为10s。
23、本发明的有益效果:
24、1、本发明所采用的几何关系推导法较好地解决了对应点标定法的不足,根据两个采样点的指向矢量及卫星j2000坐标的特点,构建了方程组模型,通过几何推导来得到近距目标单目视觉距离测量,在不损失精度的情况下可以对高轨星间近距进行精确测量。
25、2、本发明设定了卫星s位于地球静止轨道且带有一个固定倾角,模拟了对不同倾角下的目标卫星测量距离,在600km距离以下结果误差优于20km。
技术特征:
1.一种高轨星间近距目标单目视觉距离测量方法,用于测量卫星s与目标卫星t间的距离,其中,卫星s上安装有实时跟踪并指向目标卫星t的星载相机,所述星载相机具有星敏功能,其特征在于,包括以下步骤:
2.根据权利要求1所述的高轨星间近距目标单目视觉距离测量方法,其特征在于:所述卫星s位于地球静止轨道且带有一个固定倾角。
3.根据权利要求2所述的高轨星间近距目标单目视觉距离测量方法,其特征在于:所述固定倾角范围为0-0.1°。
4.根据权利要求1或2或3所述的高轨星间近距目标单目视觉距离测量方法,其特征在于:所述卫星s在偏心率为0时,其轨道为圆形。
5.根据权利要求4所述的高轨星间近距目标单目视觉距离测量方法,其特征在于:所述近距是指小于等于600km。
6.根据权利要求1所述的高轨星间近距目标单目视觉距离测量方法,其特征在于:所述预设时间间隔为10s。
技术总结
本发明公开了一种高轨星间近距目标单目视觉距离测量方法,以解决现有的单目视觉测距方法无法精确测量高轨星间距离的技术问题。具体包括:步骤1、计算星敏感器坐标到天球坐标系的旋转矩阵M<subgt;J2000</subgt;;步骤2、计算星载相机视轴中心对目标卫星T的指向矢量V<supgt;T</supgt;;步骤3、构建方程组;步骤4、求取距离。本发明所采用的几何关系推导法较好地解决了对应点标定法的不足,根据两个采样点的指向矢量及卫星J2000坐标的特点,构建了方程组模型,通过几何推导来得到近距目标单目视觉距离测量,在不损失精度的情况下可以对高轨星间近距进行精确测量。
技术研发人员:张德瑞,陈卫宁,李翔,赵清
受保护的技术使用者:中国科学院西安光学精密机械研究所
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!