一种基于无人机图像采集的河湖排污动向捕捉方法与流程
本发明涉及排污动向捕捉,具体为一种基于无人机图像采集的河湖排污动向捕捉方法。
背景技术:
1、排污动向捕捉,是指通过监测和分析排放源的排放行为和趋势,以识别和评估污染物的排放情况和变化,它主要包括对各种污染源的排放量、排放浓度、排放组成等进行监测和数据收集,通过对这些数据的处理和分析,可以确定污染源的排放趋势和变化规律,排污动向捕捉的目的是帮助制定和实施环境保护政策和措施,以减少污染物的排放,改善环境质量。
2、现有的基于图像采集的排污动向捕捉技术中,通常都是通过图片分析已有污染区域得到的河湖排污导致的污染水域,难以通过对河湖的数据进行分析,从源头上判断其排污导致的污染水域处于什么位置,而现有的基于图像采集的排污动向捕捉技术中,只能对河湖进行全方位拍摄,分析已有污染水域,不能有针对性地对某一区域进行检测,此种方式需要的数据处理量较大,分析效率较低,且只进行一次图像灰度值分析会出现由于光照原因产生较大的分析误差的问题,比如在公开号为:“cn116229276a”的发明专利中,公开了“基于计算机视觉的入河排污检测方法”,该方案就是对河湖进行全面拍摄后分析其已有污染水域,没有针对河湖数据判断其污染水域的位置,且仅对河湖进行一次灰度值分析,误差太大,分析结果不够可靠,现有的基于图像采集的排污动向捕捉技术还存在难以根据河湖数据分析判断排污动向的终点,且对河湖污染水域的分析方法太过单一,导致分析过程效率较低以及分析结果没有信服力的问题。
技术实现思路
1、本发明旨在至少在一定程度上解决现有技术中的技术问题之一,本发明用于解决现有的基于图像采集的排污动向捕捉技术还存在难以根据河湖数据分析判断排污动向的终点,且对河湖污染水域的分析方法太过单一,导致分析过程效率较低以及分析结果没有信服力的问题。
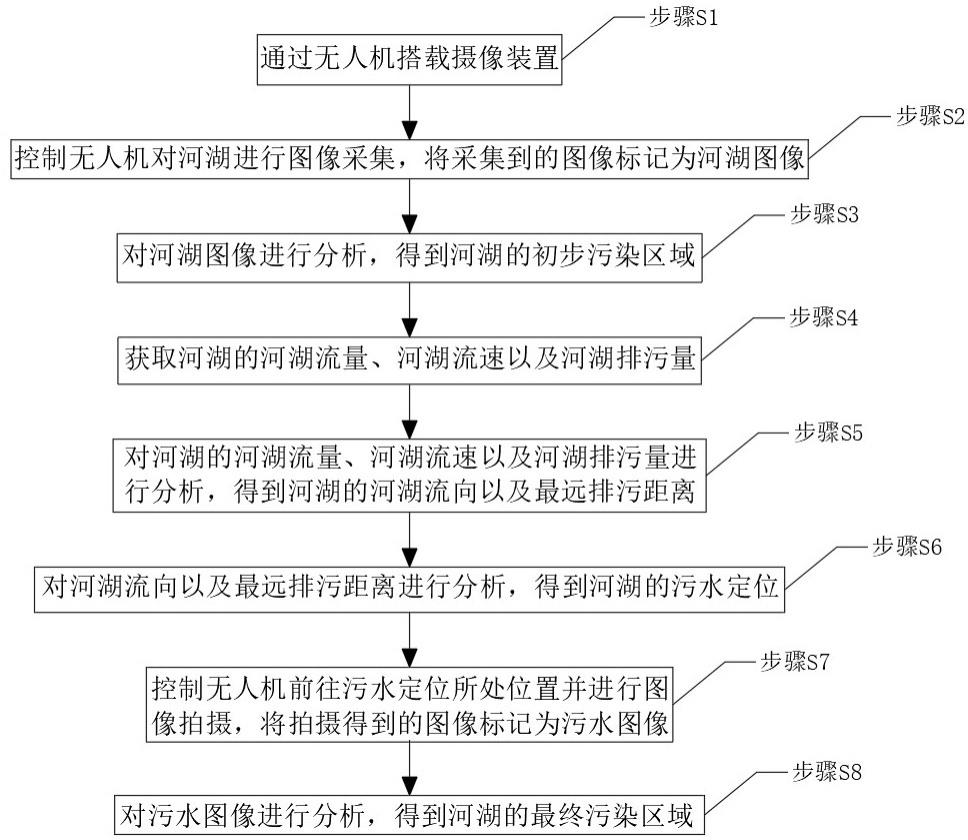
2、为实现上述目的,本技术提供一种基于无人机图像采集的河湖排污动向捕捉方法,所述排污动向捕捉方法包括:
3、步骤s1,通过无人机搭载摄像装置;
4、步骤s2,控制无人机对河湖进行图像采集,将采集到的图像标记为河湖图像;
5、步骤s3,对河湖图像进行分析,得到河湖的初步污染区域;
6、步骤s4,获取河湖的河湖流量、河湖流速以及河湖排污量;
7、步骤s5,对河湖的河湖流量、河湖流速以及河湖排污量进行分析,得到河湖的河湖流向以及最远排污距离;
8、步骤s6,对河湖流向以及最远排污距离进行分析,得到河湖的污水定位;
9、步骤s7,控制无人机前往污水定位所处位置并进行图像拍摄,将拍摄得到的图像标记为污水图像;
10、步骤s8,对污水图像进行分析,得到河湖的最终污染区域。
11、进一步地,所述步骤s2包括如下子步骤:
12、步骤s201,控制无人机前往指定检测点;
13、步骤s202,对河湖进行拍摄,将拍摄得到的图像标记为河湖图像。
14、进一步地,所述步骤s3包括如下子步骤:
15、步骤s301,通过智能图片提取模型对河湖图像中的植物图像进行提取;
16、步骤s302,通过智能识物模型对植物图像进行分析,得到植物种类;
17、步骤s303,将植物种类与污染植物数据库中的污染植物种类进行比对,若植物种类与污染植物种类均不相同,则输出正常植物信号;若植物种类与污染植物种类存在相同,则输出污染植物信号;
18、步骤s304,若输出污染植物信号,则将河湖图像进行灰度化处理并标记为河湖灰度图,通过轮廓提取模型对河湖灰度图中的污染植物所处水域进行轮廓提取,将提取到的水域轮廓扩大第一区域倍数,并将其标记为河湖污染区域,同时获取无人机坐标,将其标记为河湖污染区坐标;
19、步骤s305,获取河湖灰度图,提取每个像素点的灰度值,将灰度值与第一灰度阈值进行比对,若灰度值小于等于第一灰度阈值,则输出污染区域信号;若灰度值大于第一灰度阈值,则输出正常区域信号;
20、步骤s306,收集所有污染区域信号,将输出污染区域信号的像素点整合并标记为初步污染区域,同时获取无人机坐标,将其标记为污染坐标。
21、进一步地,所述轮廓提取模型通过将河湖灰度图进行二值化处理,得到河湖二值图,再获取目标像素点颜色以及与目标像素点相邻的相邻像素点颜色,若目标像素点颜色为黑色,且对应的所有相邻像素点颜色均为黑色,则将目标像素点删除,对所有像素点进行分析,保留的图像即为水域轮廓。
22、进一步地,所述步骤s4包括如下子步骤:
23、步骤s401,向河湖内安装流量计以及水流速度传感器;
24、步骤s402,获取河湖流量以及河湖流速;
25、步骤s403,读取排污数据库,获取当前的河湖排污量。
26、进一步地,所述步骤s5包括如下子步骤:
27、步骤s501,通过无人机向河湖内投放一枚浮漂;
28、步骤s502,控制无人机通过智能视觉跟踪模型对浮漂进行跟拍,同时对浮漂经过的线路进行高亮显示,并标记为河湖流向;
29、步骤s503,通过排污距离计算公式对河湖流量以及河湖流速进行计算,得到最远排污距离;
30、所述排污距离计算公式配置为:;其中,l为最远排污距离,f为河湖流量,v为河湖流速,p为河湖排污量,α为预设流量系数,β为预设流速系数。
31、进一步地,所述步骤s6包括如下子步骤:
32、步骤s601,获取河湖流向以及最远排污距离;
33、步骤s602,基于河湖流向,获取与排污点相距最远排污距离的水域的坐标,标记为污水定位。
34、进一步地,所述步骤s7包括如下子步骤:
35、步骤s701,控制无人机前往污水定位所处位置;
36、步骤s702,通过无人机对污水定位所处位置进行图像拍摄,将拍摄得到的图像标记为污水图像。
37、进一步地,所述步骤s8包括如下子步骤:
38、步骤s801,获取污水图像;
39、步骤s802,通过智能图片提取模型对污水图像中的植物图像进行提取;
40、步骤s803,通过智能识物模型对植物图像进行分析,得到植物种类;
41、步骤s804,将植物种类与污染植物数据库中的污染植物种类进行比对,若植物种类与污染植物种类均不相同,则输出正常植物信号;若植物种类与污染植物种类存在相同,则输出污染植物信号;
42、步骤s805,若输出污染植物信号,则将污水图像进行灰度化处理并标记为污水灰度图,通过轮廓提取模型对污水灰度图中的污染植物所处水域进行轮廓提取,将提取到的水域轮廓扩大第一区域倍数,并将其标记为河湖污染区域,同时获取无人机坐标,将其标记为河湖污染区坐标;
43、步骤s806,获取污水灰度图,提取每个像素点的灰度值,将灰度值与第一灰度阈值进行比对,若灰度值小于等于第一灰度阈值,则输出污染区域信号;若灰度值大于第一灰度阈值,则输出正常区域信号;
44、步骤s807,收集所有污染区域信号,将输出污染区域信号的像素点整合并标记为最终污染区域,同时获取无人机坐标,将其标记为污水坐标;
45、步骤s808,将污染坐标与污水坐标的经纬度进行距离计算,将计算结果标记为坐标距离,将坐标距离与第一误差阈值进行比对,若坐标距离小于等于第一误差阈值,则输出实际污染区信号;若坐标距离大于第一误差阈值,则输出误差较大信号;
46、步骤s809,若输出实际污染区信号,则将最终污染区域标记为河湖污染区域,将污水坐标标记为河湖污染区坐标,统计所有河湖污染区坐标保存至污染区数据库;若输出误差较大信号,则重新对河湖排污动向进行分析。
47、本发明的有益效果:本发明通过对检测区域进行拍摄后对其进行初步分析,分析其是否为河湖污染区域或初步污染区域,再通过对河湖的流速、流量以及流动方向进行分析,找到河湖的污染水域后再对其进行图像采集,通过图像对其具体的污染区域进行分析,再通过与初步污染区域的位置信息进行比对,得到河湖最终的河湖污染区域,优势在于,通过初步分析以及根据河湖数据对其污染水域的位置进行分析,可以减小因光照问题导致的图像分析不准确的问题,提高了河湖排污动向分析的准确性;
48、本发明通过对河湖进行图像识别,通过识别图像中的藻类植物判断河湖污染区域的位置,并通过轮廓提取得到河湖污染区域的具体范围,优势在于,可以快速准确地对河湖排污导致的污染水域进行识别,提高了河湖排污动向分析的及时性以及分析结果的准确性。
49、本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术了解。本技术的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!