图像处理方法、点云生成方法、电子设备及存储介质与流程
本公开涉及图像处理、点云生成,本公开尤其涉及图像处理方法、点云生成方法、电子设备及存储介质。
背景技术:
1、在基于条纹投影(相移编码图+格雷码图)的三维重建方案当中,展开相位的解算精度将直接影响点云的重建效果,从而影响后续基于点云的匹配识别抓取等工序。
2、由于被测物体(各种工件等)所处场景的环境光影响、被测物体表面形态的不同复杂程度,会使得对展开相位图的相位解算存在不同程度的错误,进而引起点云噪声,对这些错误的相位进行修正或者滤除显得至关重要。
技术实现思路
1、本公开提供了一种图像处理方法、点云生成方法、电子设备及存储介质。
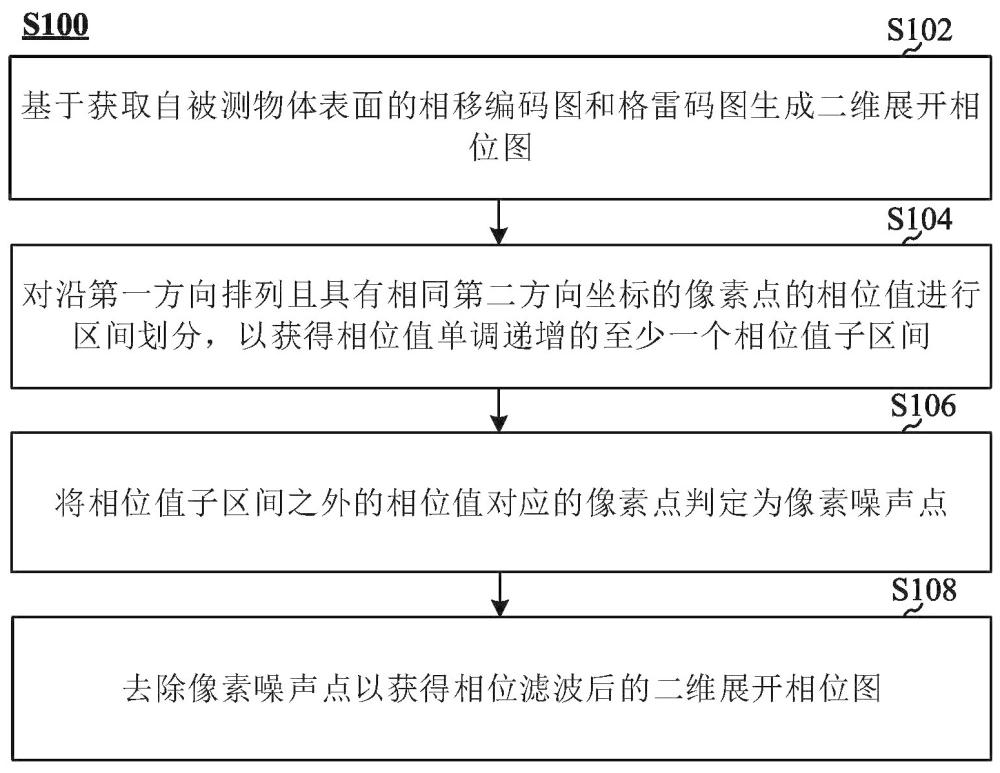
2、根据本公开的一个方面,提供一种图像处理方法,包括:基于获取自被测物体表面的相移编码图和格雷码图生成二维展开相位图,所述二维展开相位图中的像素点呈二维分布,沿第一方向排列的像素点的相位值在第一方向上变化;
3、对沿第一方向排列且具有相同第二方向坐标的像素点的相位值进行区间划分,以获得相位值单调递增的至少一个相位值子区间,所述第一方向垂直于所述第二方向;将所述相位值子区间之外的相位值对应的像素点判定为像素噪声点;去除所述像素噪声点以获得相位滤波后的二维展开相位图。
4、根据本公开的至少一个实施方式的图像处理方法,还包括:判断所述相位值子区间的相位值数量是否大于或大于等于相位值数量阈值;如果是,则不将所述相位值子区间中的相位值对应的像素点判定为像素噪声点;如果否,则将所述相位值子区间中的相位值对应的像素点判定为像素噪声点。
5、根据本公开的至少一个实施方式的图像处理方法,还包括:对所述相位滤波后的二维展开相位图进行像素缺失判断,对缺失像素进行基于邻域像素点相位值的像素补偿以获得像素补偿后的二维展开相位图。
6、根据本公开的至少一个实施方式的图像处理方法,对所述相位滤波后的二维展开相位图进行像素缺失判断,对缺失像素进行基于邻域像素点相位值的像素补偿,包括:沿第一方向进行像素缺失判断,将缺失像素点数量大于或大于等于阈值数量的域判断为第一方向像素缺失域;获取所述相位滤波后的二维展开相位图的所有第一方向像素缺失域;以及基于第一方向像素缺失域的邻域像素点相位值对所述第一方向像素缺失域进行所述像素补偿。
7、根据本公开的至少一个实施方式的图像处理方法,基于第一方向像素缺失域的邻域像素点相位值对所述第一方向像素缺失域进行所述像素补偿,包括:沿所述第一方向依次地对第一方向像素缺失域进行基于邻域像素点相位值的像素补偿。
8、根据本公开的至少一个实施方式的图像处理方法,沿所述第一方向依次地对第一方向像素缺失域进行基于邻域像素点相位值的像素补偿,包括:基于第一方向像素缺失域的第一方向邻域内的相位值差别在预设差别范围内的像素点的相位值对所述第一方向像素缺失域进行保证相位值沿第一方向单调递增的插值补偿。
9、根据本公开的至少一个实施方式的图像处理方法,所述基于第一方向像素缺失域的邻域像素点相位值对所述第一方向像素缺失域进行所述像素补偿,还包括:当所述第一方向像素缺失域的第一方向邻域内的相位值差别在预设差别范围之外,则基于所述第一方向像素缺失域的第二方向邻域内的相位值差别在预设差别范围内的像素点的相位值对所述第一方向像素缺失域进行保证相位值沿第一方向单调递增的插值补偿。
10、根据本公开的至少一个实施方式的图像处理方法,还包括:对所述像素补偿后的二维展开相位图进行基于图像形态的二次噪声点去除。
11、根据本公开的至少一个实施方式的图像处理方法,对所述像素补偿后的二维展开相位图进行基于图像形态的二次噪声点去除,包括:为像素补偿后的二维展开相位图生成匹配掩模图;将像素补偿后的二维展开相位图中有相位值的位置映射至匹配掩模图的对应位置并标记为1,无相位值的位置映射至匹配掩模图的对应位置并标记为0,以获得匹配二值相位图;对匹配二值相位图进行形态学开运算以与所述匹配掩模图进行比较,定位出二维展开相位图中的像素噪声点并去除。
12、根据本公开的另一个方面,提供一种点云生成方法,包括:获取被测物体表面的相移编码图和格雷码图;基于二维展开相位图获取表征被测物体表面形貌特征的点云数据;其中,所述二维展开相位图为基于本公开任一个实施方式的图像处理方法生成及处理的二维展开相位图。
13、根据本公开的又一个方面,提供一种图像处理装置,包括:二维展开相位图生成模块,所述二维展开相位图生成模块基于获取自被测物体表面的相移编码图和格雷码图生成二维展开相位图,所述二维展开相位图中的像素点呈二维分布,沿第一方向排列的像素点的相位值在第一方向上变化;相位值子区间生成模块,所述相位值子区间生成模块对沿第一方向排列且具有相同第二方向坐标的像素点的相位值进行区间划分,以获得相位值单调递增的至少一个相位值子区间,所述第一方向垂直于所述第二方向;噪声点判定模块,所述噪声点判定模块将所述相位值子区间之外的相位值对应的像素点判定为像素噪声点;以及相位滤波模块,所述相位滤波模块去除所述像素噪声点以获得相位滤波后的二维展开相位图。
14、根据本公开的至少一个实施方式的图像处理装置,还包括:像素缺失判断及补偿模块,所述像素缺失判断模块对所述相位滤波后的二维展开相位图进行像素缺失判断,对缺失像素进行基于邻域像素点相位值的像素补偿以获得像素补偿后的二维展开相位图。
15、根据本公开的至少一个实施方式的图像处理装置,还包括:二次滤波模块,所述二次滤波模块对所述像素补偿后的二维展开相位图进行基于图像形态的二次噪声点去除。
16、根据本公开的又一个方面,提供一种点云生成装置,包括:图像获取模块,所述图像获取模块获取被测物体表面的相移编码图和格雷码图;以及点云数据生成模块,所述点云数据生成模块基于二维展开相位图获取表征被测物体表面形貌特征的点云数据;其中,所述二维展开相位图为基于本公开任一个实施方式的图像处理装置生成及处理的二维展开相位图。
17、根据本公开的又一个方面,提供一种电子设备,包括:存储器,所述存储器存储执行指令;以及处理器,所述处理器执行所述存储器存储的执行指令,使得所述处理器执行本公开任一个实施方式的图像处理方法和/或执行本公开任一个实施方式的点云生成方法。
18、根据本公开的再一个方面,提供一种可读存储介质,所述可读存储介质中存储有执行指令,所述执行指令被处理器执行时用于实现本公开任一个实施方式的图像处理方法和/或执行本公开任一个实施方式的点云生成方法。
19、本公开的一些实施方式的图像处理方法,通过对展开相位图滤波,既降低相位噪声,又最大程度地保留相位数据的完整性,从而降低点云噪声,能够提高点云数据的信噪比。
技术特征:
1.一种图像处理方法,其特征在于,包括:
2.根据权利要求1所述的图像处理方法,其特征在于,还包括:
3.根据权利要求1或2所述的图像处理方法,其特征在于,还包括:
4.根据权利要求3所述的图像处理方法,其特征在于,对所述相位滤波后的二维展开相位图进行像素缺失判断,对缺失像素进行基于邻域像素点相位值的像素补偿,包括:
5.根据权利要求4所述的图像处理方法,其特征在于,基于第一方向像素缺失域的邻域像素点相位值对所述第一方向像素缺失域进行所述像素补偿,包括:
6.根据权利要求5所述的图像处理方法,其特征在于,沿所述第一方向依次地对第一方向像素缺失域进行基于邻域像素点相位值的像素补偿,包括:
7.根据权利要求4至6中任一项所述的图像处理方法,其特征在于,所述基于第一方向像素缺失域的邻域像素点相位值对所述第一方向像素缺失域进行所述像素补偿,还包括:
8.一种点云生成方法,其特征在于,包括:
9. 一种电子设备,其特征在于,包括:
10.一种可读存储介质,其特征在于,所述可读存储介质中存储有执行指令,所述执行指令被处理器执行时用于实现权利要求1至7中任一项所述的图像处理方法和/或执行权利要求8所述的点云生成方法。
技术总结
本公开提供了一种图像处理方法、点云生成方法、电子设备及存储介质。本公开的图像处理方法,包括:基于获取自被测物体表面的相移编码图和格雷码图生成二维展开相位图,二维展开相位图中的像素点呈二维分布,沿第一方向排列的像素点的相位值在第一方向上变化;对沿第一方向排列且具有相同第二方向坐标的像素点的相位值进行区间划分,以获得相位值单调递增的至少一个相位值子区间,第一方向垂直于第二方向;将相位值子区间之外的相位值对应的像素点判定为像素噪声点;以及去除像素噪声点以获得相位滤波后的二维展开相位图。
技术研发人员:邓小婷,李宏坤,樊钰
受保护的技术使用者:北京迁移科技有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!