变电站设备的元器件状态识别方法、装置、设备及介质与流程
本技术涉及电力运维,尤其是涉及变电站设备的元器件状态识别方法、装置、设备及介质。
背景技术:
1、在变电站这一特殊场景中,随着城市化进程的不断推进,城市面积不断扩大,为了满足日益增长的电力需求,城市中修建了大量的变电站。然而,随之而来的是变电站的维护操作和巡检工作任务数量的逐渐增加。当前操作维护的工作人员数量已经难以满足这些不断增加的任务需求。面对这一情况,提高相关操作和巡检工作的效率成为当务之急。为保障变电站的安全运行,遵循安全生产方针十分关键。在这种要求下,一个高效、安全、稳定的面板状态识别系统助力工作人员提高操作巡检效率,更好地维护变电站的安全运行。然而,在实际的变电站环境中,高压配电箱现有数十至上百种型号,每种型号的开关位置及标识不一致。面板中元件外观丰富多样,状态呈现方式五花八门,不同配电房光照条件不一致,这使得面板状态识别带来一定的难度。所以,如何提高变电站设备的元器件状态识别的准确性成为了不容小觑的技术问题。
技术实现思路
1、有鉴于此,本技术的目的在于提供变电站设备的元器件状态识别方法、装置、设备及介质,利用变电站设备关闭状态的图像对变电站设备进行背景建模,利用工作状态的图像以及背景建模快速准确地确定出变电站设备的元器件实际坐标信息,然后再对元器件的工作状态进行分类识别,进而提高了元器件状态识别的准确性。
2、本技术实施例提供了一种变电站设备的元器件状态识别方法,所述元器件状态识别方法包括:
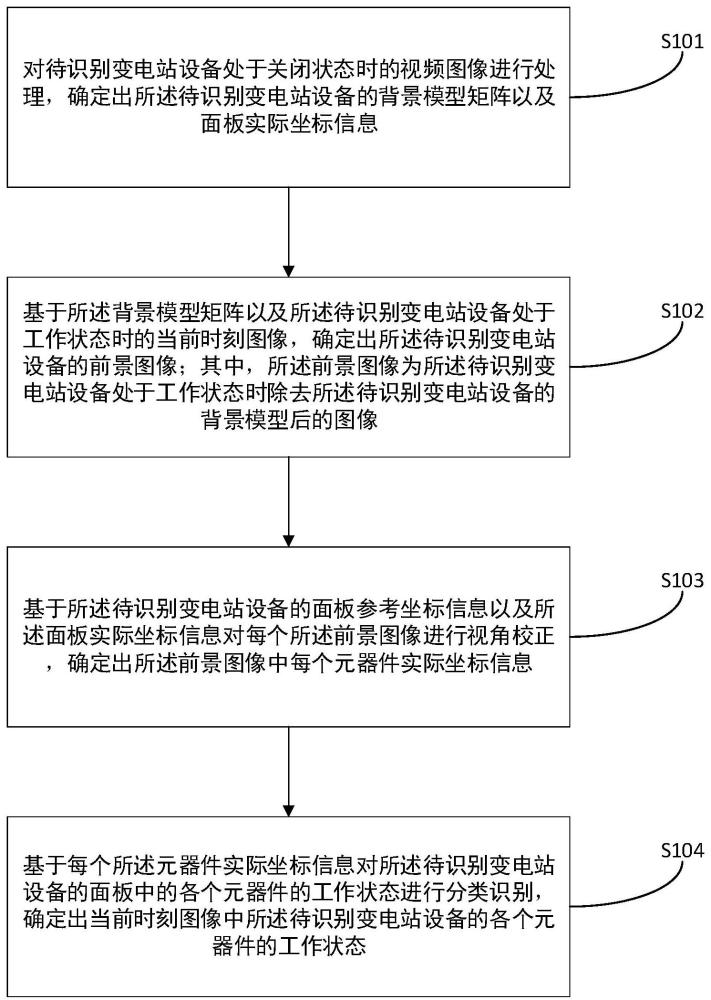
3、对待识别变电站设备处于关闭状态时的视频图像进行处理,确定出所述待识别变电站设备的背景模型矩阵以及面板实际坐标信息;
4、基于所述背景模型矩阵以及所述待识别变电站设备处于工作状态时的当前时刻图像,确定出所述待识别变电站设备的前景图像;其中,所述前景图像为所述待识别变电站设备处于工作状态时除去所述待识别变电站设备的背景模型后的图像;
5、基于所述待识别变电站设备的面板参考坐标信息以及所述面板实际坐标信息对每个所述前景图像进行视角校正,确定出所述前景图像中每个元器件实际坐标信息;
6、基于每个所述元器件实际坐标信息对所述待识别变电站设备的面板中的各个元器件的工作状态进行分类识别,确定出当前时刻图像中所述待识别变电站设备的各个元器件的工作状态。
7、在一种可能的实施方式之中,所述对待识别变电站设备处于关闭状态时的视频图像进行处理,确定出所述待识别变电站设备的背景模型矩阵以及面板实际坐标信息,包括:
8、将所述视频图像之中的每一图像帧进行灰度转换,确定出多个第一灰度图像;
9、将每一所述第一灰度图像转换成一列图像向量,基于多列所述图像向量,确定出所述背景模型矩阵;
10、基于所述视频图像,确定出所述面板实际坐标信息。
11、在一种可能的实施方式之中,所述基于所述背景模型矩阵以及所述待识别变电站设备处于工作状态时的当前时刻图像,确定出所述待识别变电站设备的前景图像,包括:
12、对所述当前时刻图像进行灰度转换处理,确定出第二灰度图像;
13、将所述第二灰度图像转换成目标向量,并将所述目标向量添加至所述背景模型矩阵之中,确定出目标矩阵;
14、基于前景提取算法对所述目标矩阵进行处理,确定出所述目标矩阵之中的稀疏矩阵;其中,所述稀疏矩阵是由所述当前时刻图像与所述视频图像的多个图像帧之间的元器件所在位置的四周像素坐标值构成的;
15、在所述稀疏矩阵之中确定出所述目标向量,将所述目标向量恢复至二维矩阵后,确定出所述前景图像。
16、在一种可能的实施方式之中,所述基于所述待识别变电站设备的面板参考坐标信息以及所述面板实际坐标信息对所述前景图像进行视角校正,确定出所述前景图像中每个元器件实际坐标信息元器件实际坐标信息,包括:
17、基于所述面板参考坐标信息以及所述面板实际坐标信息,确定出视角校正的单应矩阵;
18、基于所述视角校正的单应矩阵对所述前景图像进行视觉校正,确定出每个所述元器件实际坐标信息。
19、在一种可能的实施方式之中,所述基于每个所述元器件实际坐标信息对所述待识别变电站设备的面板中的各个元器件的工作状态进行分类识别,确定出当前时刻图像中所述待识别变电站设备的各个元器件的工作状态,包括:
20、基于每个所述元器件实际坐标信息对所述待识别变电站设备的面板中的各个元器件的图像进行分割,确定出分割后的多个元器件图像;
21、基于分割后的多个所述元器件图像,确定出当前时刻图像中所述待识别变电站设备的各个元器件的工作状态。
22、在一种可能的实施方式之中,针对于所述元器件的类别为指示灯器件,所述基于分割后的多个所述元器件图像,确定出当前时刻图像中所述待识别变电站设备的各个元器件的工作状态,包括:
23、检测该元器件图像的灰度阈值是否超过预设灰度阈值;
24、若是,则当前时刻图像中该元器件处于亮灯的工作状态;
25、若否,则当前时刻图像中该元器件处于灭灯的工作状态。
26、在一种可能的实施方式之中,针对于所述元器件的类别为旋钮器件,所述基于分割后的多个所述元器件图像,确定出当前时刻图像中所述待识别变电站设备的各个元器件的工作状态,包括:
27、基于该元器件图像,确定出该元器件的指示矩形轮廓;
28、基于所述指示矩形轮廓,确定出该元器件的角度信息;
29、基于所述角度信息,确定出当前时刻图像中该元器件的工作状态。
30、在一种可能的实施方式之中,通过以下步骤确定出所述面板参考坐标信息:
31、获取多个样本图片,对所述样本图片中的各个样本面板的四周像素坐标值以及面板类型进行标注,以及对各个样本面板中的样本元器件的四周像素坐标值以及元器件类型进行标注;
32、将所述待识别变电站设备与每个所述样本图片进行匹配,将匹配成功的所述样本图片的样本面板的四周像素坐标值确定为所述面板参考坐标信息。
33、本技术实施例还提供了一种变电站设备的元器件状态识别装置,所述元器件状态识别装置包括:
34、第一确定模块,用于对待识别变电站设备处于关闭状态时的视频图像进行处理,确定出所述待识别变电站设备的背景模型矩阵以及面板实际坐标信息;
35、第二确定模块,用于基于所述背景模型矩阵以及所述待识别变电站设备处于工作状态时的当前时刻图像,确定出所述待识别变电站设备的前景图像;其中,所述前景图像为所述待识别变电站设备处于工作状态时除去所述待识别变电站设备的背景模型后的图像;
36、校正模块,用于基于所述待识别变电站设备的面板参考坐标信息以及所述面板实际坐标信息对每个所述前景图像进行视角校正,确定出所述前景图像中每个元器件实际坐标信息;
37、状态确定模块,用于基于每个所述元器件实际坐标信息对所述待识别变电站设备的面板中的各个元器件的工作状态进行分类识别,确定出当前时刻图像中所述待识别变电站设备的各个元器件的工作状态。
38、本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的变电站设备的元器件状态识别方法的步骤。
39、本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的变电站设备的元器件状态识别方法的步骤。
40、本技术实施例提供的变电站设备的元器件状态识别方法、装置、设备及介质,所述元器件状态识别方法包括:对待识别变电站设备处于关闭状态时的视频图像进行处理,确定出所述待识别变电站设备的背景模型矩阵以及面板实际坐标信息;基于所述背景模型矩阵以及所述待识别变电站设备处于工作状态时的当前时刻图像,确定出所述待识别变电站设备的前景图像;其中,所述前景图像为所述待识别变电站设备处于工作状态时除去所述待识别变电站设备的背景模型后的图像;基于所述待识别变电站设备的面板参考坐标信息以及所述面板实际坐标信息对每个所述前景图像进行视角校正,确定出所述前景图像中每个元器件实际坐标信息;基于每个所述元器件实际坐标信息对所述待识别变电站设备的面板中的各个元器件的工作状态进行分类识别,确定出当前时刻图像中所述待识别变电站设备的各个元器件的工作状态。利用工作状态的图像以及背景建模快速准确地确定出变电站设备的元器件实际坐标信息,然后再对元器件的工作状态进行分类识别,进而提高了元器件状态识别的准确性。
41、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!