一种基于力反馈技术的虚拟触觉签字平台及方法
本发明涉及力反馈,具体为一种基于力反馈技术的虚拟触觉签字平台及方法。
背景技术:
1、近年来,随着计算机技术和人工智能的快速发展,虚拟现实和增强现实技术已经逐渐融入了人们的日常生活。其中,力反馈技术作为一项关键技术,可以让用户在虚拟环境中感受到真实的触觉反馈,进一步增强了虚拟现实的沉浸感。然而,尽管力反馈技术已经取得了一定的进展,但在虚拟触觉签字平台及方法方面的应用还尚未普及,无法满足人们对安全、高效、便捷的签字需求。
2、传统的签字方式通常是在纸质或电子屏幕上进行,但这些方式存在一些固有的问题。例如,纸质签字容易被伪造,而电子屏幕签字只能采集平面的签字数据并且缺乏真实的触感,使得签字过程显得不够庄重和安全。此外,传统的签字过程往往需要消耗大量的时间和资源,不符合现代社会的快节奏生活方式。
3、因此,开发一种基于力反馈技术的虚拟触觉签字平台及方法显得尤为重要。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于力反馈技术的虚拟触觉签字平台及方法,解决了上述背景技术中提出的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:一种基于力反馈技术的虚拟触觉签字方法,包括:
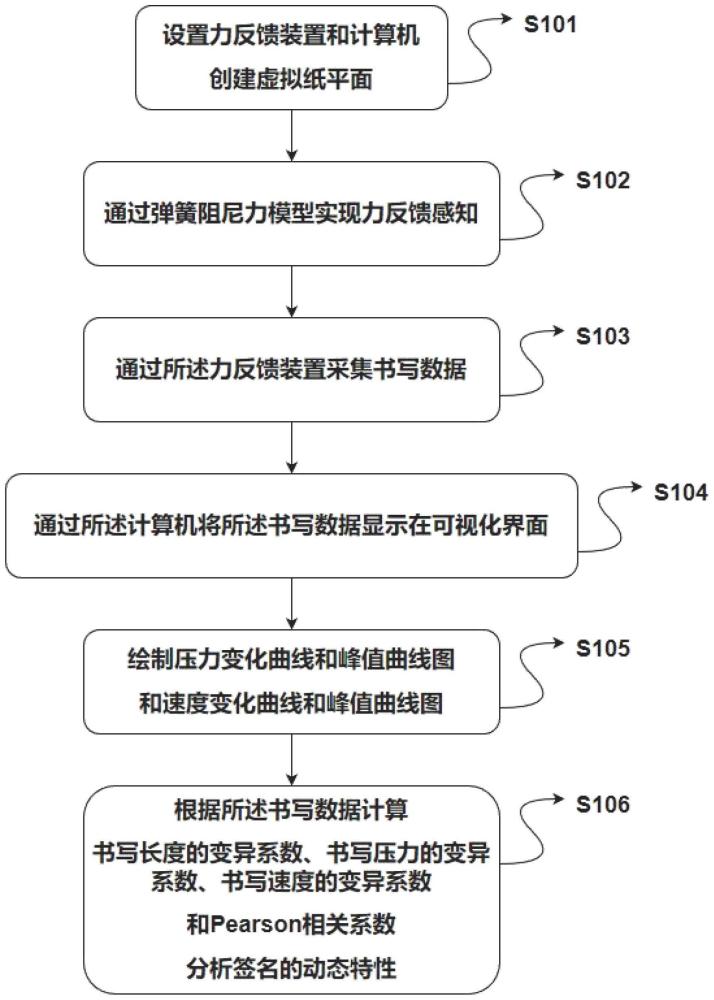
5、s101、设置力反馈装置和计算机,并创建虚拟纸平面;
6、s102、通过弹簧阻尼力模型实现力反馈感知;
7、s103、通过所述力反馈装置采集书写数据;
8、s104、通过所述计算机将所述书写数据显示在可视化界面;
9、s105、绘制压力变化曲线和峰值曲线图和速度变化曲线和峰值曲线图;
10、s106、根据所述书写数据计算书写长度的变异系数、书写压力的变异系数、书写速度的变异系数和pearson相关系数,并分析签名的动态特性。
11、优选的,所述s101具体包括:
12、s1011、所述力反馈装置和所述计算机通讯连接;
13、s1012、通过openhaptics库创建并设置所述虚拟纸平面的大小、摩擦力和弹性;
14、s1013、通过openhaptics库中的碰撞模型定义所述虚拟纸平面的形状和碰撞行为;
15、s1014、通过openhaptics库中的纹理和颜色设置为所述虚拟纸平面添加视觉效果,所述视觉效果包括纹理宽度、纹理高度和颜色。
16、优选的,所述s102具体包括:
17、s1021、通过所述力反馈装置建立弹簧阻尼力模型;
18、s1022、结合所述s101创建的所述虚拟纸平面设置所述弹簧阻尼力模型的刚度、阻尼系数、质量、作用点和方向。
19、优选的,所述s103具体包括:
20、s1031、所述力反馈装置包括手持触控笔,所述力反馈装置提供3d输入,所述3d输入包括测量所述手持触控笔的3d空间位置和运动方向,所述3d空间位置包括x轴、y轴和z轴,所述运动方向包括上下翻转、左右摇动和横向移动;
21、s1032、所述手持触控笔的笔尖和所述虚拟纸平面的接触距离小于0时,所述力反馈装置采集所述手持触控笔的笔尖和所述虚拟纸平面的接触时间作为书写时间,采集所述手持触控笔的笔尖在所述虚拟纸平面内运动的3d空间位移坐标和所述手持触控笔的笔尖所受压力的动态数据;
22、s1033、所述手持触控笔的笔尖和所述虚拟纸平面的接触距离大于0时,所述力反馈装置中止采集;
23、s1034、所述手持触控笔的笔尖和所述虚拟纸平面的接触距离再次小于0时,所述力反馈装置恢复采集。
24、优选的,s104具体包括:
25、s1041、所述力反馈装置将采集的所述书写数据共享至所述计算机;
26、s1042、所述计算机通过图形渲染程序根据所述书写数据实时渲染书写图像;
27、s1043、将所述书写图像显示在所述可视化界面,所述可视化界面包括所述计算机的显示装置。
28、优选的,s105具体包括:
29、s1051、根据所述力反馈装置采集的3d空间位移坐标和写入时间计算得到每一刻的写入速度,
30、
31、上述式中,v为写入速度,δd为连续两个采样点之间的位移距离,δt为和δd同样的连续两个采样点之间的位移时间;
32、s1052、提取所述书写数据的速度和压力峰值;
33、s1053、绘制压力变化曲线和峰值曲线图和速度变化曲线和峰值曲线图。
34、优选的,所述s106具体包括:
35、s1061、采用动态时间翘曲(dtw)算法并根据最大相似度原则对所述s105得到的任意两条曲线进行压缩和扩展并以最小化总距离对齐,以获得两条相同长度的曲线;
36、s1062、分别计算书写长度、书写压力和书写速度的平均值(μ)和标准差(σ);
37、s1063、计算书写长度、书写压力和书写速度的变异系数,计算方法一致,
38、
39、上述式中,cv为变异系数,μ为平均值,σ为标准差;
40、s1064、计算压力变化曲线和速度变化曲线的pearson相关系数,
41、
42、上述式中,为pi样本的标准分数,为pi样本平均值,σp为pi样本标
43、准差,为vi样本的标准分数,为vi样本平均值,σv为vi样本标准差,n为样本数量;
44、s1065、真实签名书写长度的变异系数在15%以内,平均压力和平均速度的变异系数在15%以内,写入压力变化曲线与写入速度的平均相关系数书写压力曲线和书写速度曲线的平均相关系数均大于0.8,则说明笔迹相似;
45、s1066、根据变异系数和pearson相关系数分析同一人的签名动态特征的稳定性和不同人的签名动态特征的可变性。
46、优选的,所述s1061具体包括:
47、s10611、定义欧几里得距离相似度函数,
48、
49、上述式中,p(t)为压力变化曲线在时间点t的值,v(t)为速度变化曲线在时间点t的值,i为时间序列中的第i个时间点;
50、s10612、定义压缩函数和扩展函数,其中压缩函数为,
51、com(p(t),r)=p(t)×r
52、上述式中,p(t)为原始时间序列在时间点t的值,r为缩放因子,压缩函数将p(t)的值乘以r,得到压缩后的值,
53、扩展函数为,
54、
55、上述式中,p(t)表示原始时间序列的时间点t的值,r为缩放因子,扩展函数将p(t)的值除以r,得到扩展后的值;
56、s10613、初始化动态时间翘曲矩阵,根据给定的两条曲线,初始化一个动态时间翘曲矩阵,所述动态时间翘曲矩阵的行数为两条曲线的长度之和,列数为两条曲线的长度之和,矩阵中的每个元素表示两条曲线在相应位置上的距离;
57、s10614、计算距离矩阵,对于动态时间翘曲矩阵中的每个元素,计算两条曲线在相应位置上的距离,对于每个时间点i,计算压力变化曲线p(t)和速度变化曲线v(t)在该时间点上的值,然后使用欧几里得距离公式计算它们之间的距离;
58、s10615、动态规划求解,从所述动态时间翘曲矩阵的左上角开始,沿着所述动态时间翘曲矩阵的边缘依次计算每个位置的最小距离,具体来说,对于每个位置(i,j),计算从左上角到该位置的最小距离,并更新该位置的值,在计算过程中,可以选择是否使用“打洞”操作(即删除某个时间点的值),和是否使用“跳过”操作(即跳过某个时间段的值);
59、s10616、路径回溯,根据动态规划求解的结果,回溯得到最小距离的路径,所述路径对应了最佳的对齐方式,即将压力变化曲线和速度变化曲线进行压缩和扩展后的结果;
60、s10617、调整路径,在得到最小距离的路径后,对该路径进行调整,以获得更好的结果,可以尝试删除某个“打洞”操作,或者将某个“跳过”操作替换为其他操作,通过不断调整路径,可以得到更符合实际情况的结果;
61、s10618、对齐曲线,根据调整后的路径,对压力变化曲线和速度变化曲线进行压缩和扩展,以得到两条相同长度的曲线。
62、一种基于力反馈技术的虚拟触觉签字平台,包括力反馈装置、虚拟纸平面和计算机,所述力反馈装置和所述计算机通讯连接,所述力反馈装置包括手持触控笔,所述手持触控笔由使用者握住使用,所述力反馈装置通过力反馈提供3d输入,所述3d输入测量所述手持触控笔的3d空间位置和运动方向,所述虚拟纸平面通过弹簧阻尼力模型实现力反馈感知,所述力反馈装置将所采集的数据实时共享至所述计算机,所述计算机通过图形渲染程序将所述手持触控笔的书写内容显示在可视化界面,所述计算机根据所述力反馈装置共享的3d空间坐标和写入时间得出每一刻的写入速度并根据时间序列的速度和压力变化数据绘制曲线。
63、(三)有益效果
64、本发明提供了一种基于力反馈技术的虚拟触觉签字平台及方法。具备以下有益效果:
65、1、本方案通过力反馈技术、创建虚拟纸平面和弹簧阻力力模型构建了一个虚拟触觉签字平台,并通过计算签字时的长度、压力和速度的变异系数及pearson相关系数,进而分析稳定签名笔迹动态特性,可应用于收集3d签名数据和笔迹相似度判断。
- 还没有人留言评论。精彩留言会获得点赞!