一种异质喷药机器人任务分配与调度方法
本发明涉及多机器人任务分配与调度领域,尤其是涉及一种异质喷药机器人任务分配与调度方法。
背景技术:
1、当前,世界农业正在向全球化、标准化、高创新、高价值和高效率的“新型农业”转变。在智能化、无人化技术快速发展的背景下,智慧农业迎来新的机遇和挑战。智慧农业对于解决人口老龄化导致劳动力减少以及各种复杂因素导致农业产品质量低下的问题至关重要。特别是农业机器人的引入,极大地提升了农业作业能力,减少了农药和化肥消耗,并且很大程度上减轻了工作人员的工作量。在这个过程中,对农业机器人资源的正确配置以及任务的合理调度可以进一步增加收入、提高效率并且降低农业过程所需的投入。除草作业是一件苦差事,大多数农民都乐意将其交给机器人干,通过多台喷药机器人在农田中协同作业来完成除草杀虫任务。
2、现有的农业机器人任务分配与调度研究面临着一些问题。其一,未考虑喷药时间对农业机器人执行任务的效率和成本的影响。农作物在苗期容易受杂草、害虫危害,它们会与农作物争水、争肥、争阳光,导致作物营养不良,因此进行除草杀虫作业对提高产量至关重要,除草杀虫常用的药剂有甲草胺、异丙草胺、莠去津、扑草津、苯唑草酮、硝磺草酮等。这些药剂对温度等天气条件的要求较为严苛,过高或者过低的温度等条件均会影响除草杀虫剂的效用,例如,中午光照强,药剂易分解、易挥发,故效果差。因此,一般来说,农作物最佳喷药时间为上午9点至11点,下午4点至7点。上午9点左右,露水才干,此时用药不会被露水冲淡药液,也不会因为温度过高而使药液分解、降低药效。下午4点以后,太阳偏西、光线渐弱,夜出性害虫即将开始活动,这时喷施农药,可有效地杀灭夜出性害虫。其二,未考虑不同类型机器人,即异质机器人之间不同工作效率和能力的影响。在实际环境中,由于技术差异,农机中心往往存在多种类型的喷药机器人,其喷药效率、行驶速度、覆盖范围以及药剂装载量等均可能存在差异。
3、因此,如何提高异质农业机器人喷药任务规划的合理性,进而提高喷药效果、节省喷药成本、降低机器人系统的执行成本、提高农业生产效率和经济效益,成为本领域需要解决的问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的异质机器人喷药任务规划合理性不高,导致喷药效果差、成本高的缺陷而提供一种异质农业机器人任务分配与调度方法,能够在合适的喷药时间区间内,兼顾异质机器人不同性能,高效实现喷药任务的分配与调度。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明提供一种异质喷药机器人任务分配与调度方法,包括以下步骤:
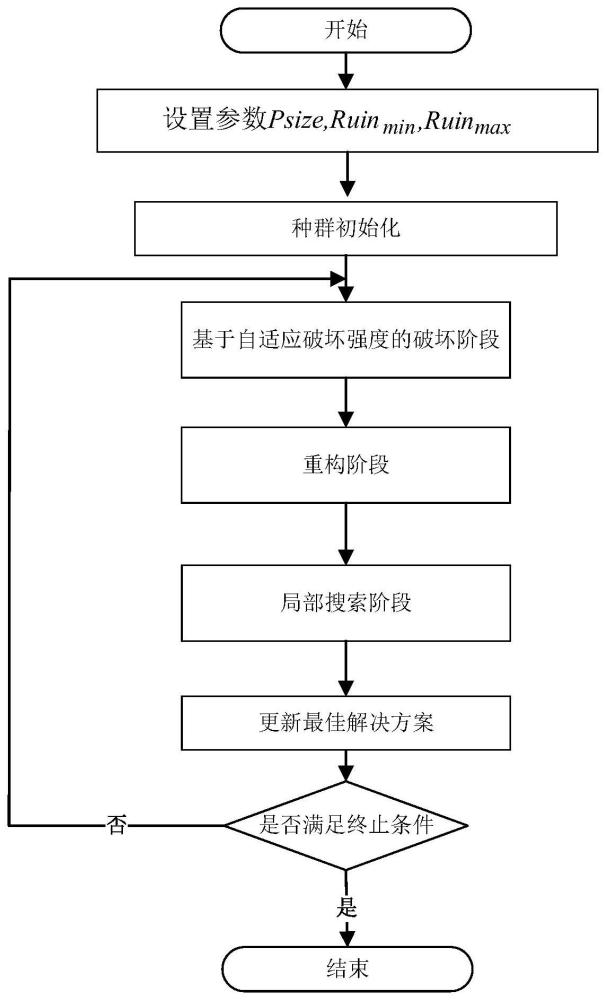
4、数据获取步骤,获取喷药机器人特征数据和任务数据,并初始化种群大小、破坏强度下界、破坏强度上界和停止时间,所述任务数据包括喷药时间窗口,所述破坏强度为移除的任务数量;
5、种群初始化步骤,利用启发式方法和随机方法分别生成多种初始解决方案并计算相应的综合成本值,形成初始种群,并从中选出所述综合成本值最小的初始解决方案,所述启发式方法包括,基于所述喷药机器人特征数据和任务数据分配任务,并基于所述喷药时间窗口和所述综合成本值,选取各任务的最佳插入位置,所述综合成本值为喷药机器人拖期惩罚成本、行驶成本以及派发成本之和;
6、自适应破坏步骤,根据当前进化状态,匹配破坏算子与破坏强度初始值,并根据所述破坏算子和当前的破坏强度执行破坏操作,获取当前的剩余任务集和破坏任务集,所述破坏算子与不同喷药机器人的特征数据或任务数据有关;
7、解决方案重构步骤,依次将当前破坏任务集中的所有任务分配至剩余任务集中综合成本值最小的位置,得到当前解决方案;
8、局部搜索优化步骤,通过局部搜索,依次重新分配每台喷药机器人的所有任务,获取综合成本值最小的解决方案;
9、最佳解决方案获取步骤,判断是否到达所述停止时间,若为否,则返回所述自适应破坏步骤,若为是,则输出当前解决方案,得到最佳的异质喷药机器人任务分配与调度方案。
10、作为优选的技术方案,所述启发式方法包括最快到达启发式方法,所述最快到达启发式方法的执行步骤包括:
11、到达时间排序步骤,计算所有任务点位置距离喷药机器人出发位置的距离和喷药机器人的到达时间,按照到达时间从小到大对所有任务排序,所述喷药机器人特征数据包括喷药机器人出发位置和移动速度,所述任务数据包括任务点位置,包括所述到达时间利用所述距离和所述移动速度计算得到;
12、任务分配步骤,逐一提取按照到达时间从小到大排序后的各任务,基于所述喷药时间窗口和所述综合成本值,将每个任务分配至相应的最佳插入位置,直至所有任务分配结束。
13、作为优选的技术方案,所述启发式方法包括最快完成启发式方法,所述最快完成启发式方法的执行步骤包括:
14、喷药时间排序步骤,计算所有任务的喷药时间,按照喷药时间从小到大对所有任务排序,所述任务数据包括任务点药剂需求量,所述喷药时间根据所述任务点药剂需求量确定;
15、任务分配步骤,逐一提取按照喷药时间从小到大排序后的各任务,基于所述喷药时间窗口和所述综合成本值,将每个任务分配至相应的最佳插入位置,直至所有任务分配结束。
16、作为优选的技术方案,所述启发式方法包括max-max启发式方法,所述max-max启发式方法的执行步骤包括:
17、喷药时间排序步骤,计算所有任务的喷药时间,按照喷药时间从大到小对所有任务排序,所述任务数据包括任务点药剂需求量,所述喷药时间根据所述任务点药剂需求量确定;
18、药剂装载量排序步骤,按照药剂装载量从大到小对所有喷药机器人排序,所述喷药机器人特征数据包括药剂装载量;
19、任务分配步骤,逐一提取按照喷药时间从大到小排序后的各任务,将各任务依次分配至从大到小排序后的各喷药机器人,分配时基于所述喷药时间窗口和所述综合成本值,将任务分配相应喷药机器人的最佳插入位置。
20、作为优选的技术方案,所述最佳插入位置的选取过程包括,比较将当前任务分配至每台喷药机器人的所有可插入位置的拖期惩罚成本,选取拖期惩罚成本最小的位置。
21、作为优选的技术方案,所述当前的破坏强度基于前一迭代轮次中的破坏强度产生,所述当前的破坏强度表达式为:
22、
23、式中,表示当前的破坏强度;ruinind表示破坏强度初始值,在所述破坏强度下界与所述破坏强度上界之间;ind∈{1,2,…psize},psize为种群大小;en(0,1)是标准正态分布。
24、作为优选的技术方案,所述破坏算子包括机器人最大拖期惩罚成本破坏算子、机器人最大综合成本破坏算子、相关破坏算子和随机破坏算子。
25、作为优选的技术方案,所述机器人最大拖期惩罚成本破坏算子的破坏操作包括,选择拖期惩罚成本最大的喷药机器人,随机破坏该喷药机器人任务列表中个任务,剩余个任务从其它喷药机器人任务列表中随机选择,其中,表示当前的破坏强度。
26、作为优选的技术方案,所述机器人最大综合成本破坏算子的破坏操作包括,选择综合成本值最大的喷药机器人,随机破坏该喷药机器人任务列表中个任务,剩余个任务从其它喷药机器人任务列表中随机选择,其中,表示当前的破坏强度。
27、作为优选的技术方案,所述相关破坏算子的破坏操作包括,
28、第一任务破坏步骤,从所有任务中随机选取当前的第一任务,将当前的第一任务移至破坏任务集;
29、相关度排序步骤,遍历所有第二任务,计算当前的第一任务与各第二任务的相关度,并将所有相关度从小到大排序,所述第二任务是选出所述当前的第一任务后的剩余任务;
30、第二任务破坏步骤,选取最小相关度对应的第二任务,移至破坏任务集,并返回所述第一任务破坏步骤。
31、与现有技术相比,本发明具有以下有益效果:
32、1、本发明通过获取喷药机器人特征数据和任务数据,结合启发式方法和自适应破坏机制,提出了满足全局优化、计算时间、解的质量、收敛速度等综合要求的迭代贪心算法,能够自动计算出异质喷药机器人任务分配与调度的最佳解决方案,并且在生成解决方案时,考虑了实际农业作业过程中的喷药时间约束和农机中心异质喷药机器人的性能约束,能够实现在合适的喷药时间区间内,兼顾异质机器人不同性能,高效完成喷药任务的分配与调度,有效提高异质机器人喷药任务规划的合理性、喷药效果差,降低任务分配和调度成本;
33、2、本发明采用高效的启发式方法产生初始解决方案,该启发式方法在分配任务时考虑异质机器人的性能和喷药时间窗口,选择任务的最佳插入位置,能够克服传统算法随机生成的初始解决方案质量低的缺点;
34、3、本发明对综合成本值的考量,有助于解决异质喷药机器人喷药过程中的各项成本优化问题,尤其是有助于解决多台喷药机器人综合成本问题,综合成本包括过晚完成喷药任务的拖期惩罚成本、喷药机器人行驶成本以及喷药机器人的派发成本,进而显著提高智慧农场的效益;
35、4、本发明采用自适应的破坏强度,并根据进化状态自动匹配破坏算子,避免了单一破坏强度不能适应所有情况的问题,能够进一步提高异质机器人喷药任务分配和调度的解决方案的质量和适应性;
36、5、本发明对喷药时间的考量,与实际农业环境中对农药喷洒时间的限制相契合,能够降低解决异质喷药机器人任务分配与调度问题的综合成本,从而显著提高农药的利用率和智慧农场的生产效率,降低智慧农场的综合成本。
- 还没有人留言评论。精彩留言会获得点赞!