锥齿轮副传动误差的计算方法、系统、设备及存储介质
本发明涉及锥齿轮副传动误差的计算相关,尤其是涉及锥齿轮副传动误差的计算方法、系统、设备及存储介质。
背景技术:
1、齿轮箱在工业界具有十分广泛的用途,如航空齿轮箱和船用齿轮箱等。随着对齿轮传动系统的研究不断深入,工业界对于齿轮箱提出了高可靠性、高传动精度等更加严格的要求,而描述齿轮啮合性能的各项参数恰恰是反映齿轮传动优劣的重要指标。其中,传动误差是描述齿轮啮合副啮合性能的重要参数,当主动齿轮均匀转动时,被动齿轮实际位置偏离理论位置的大小就是传动误差,传递误差之所以非常重要是因为研究人员发现其与齿轮的振动和噪声具有很强的相关性,因此,计算出存在偏心误差时的齿轮副传动误差一直是业内重点关注的研究课题。
2、目前,计算偏心情况下的齿轮副传动误差包括齿面接触分析技术、有限元方法和实验方法,但齿面接触分析技术的矩阵方程构建复杂,且加入偏心矩阵后计算难度上升,所需计算资源较大;有限元方法的结果准确度取决于网格密度,密度较大的网格所需的计算资源也很大;实验方法耗费人力物力,且准确度取决于试验台传感器的灵敏度。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题。为此,本发明提出一种锥齿轮副传动误差的计算方法、系统、设备及存储介质,能够提高计算效率和计算结果的准确度。
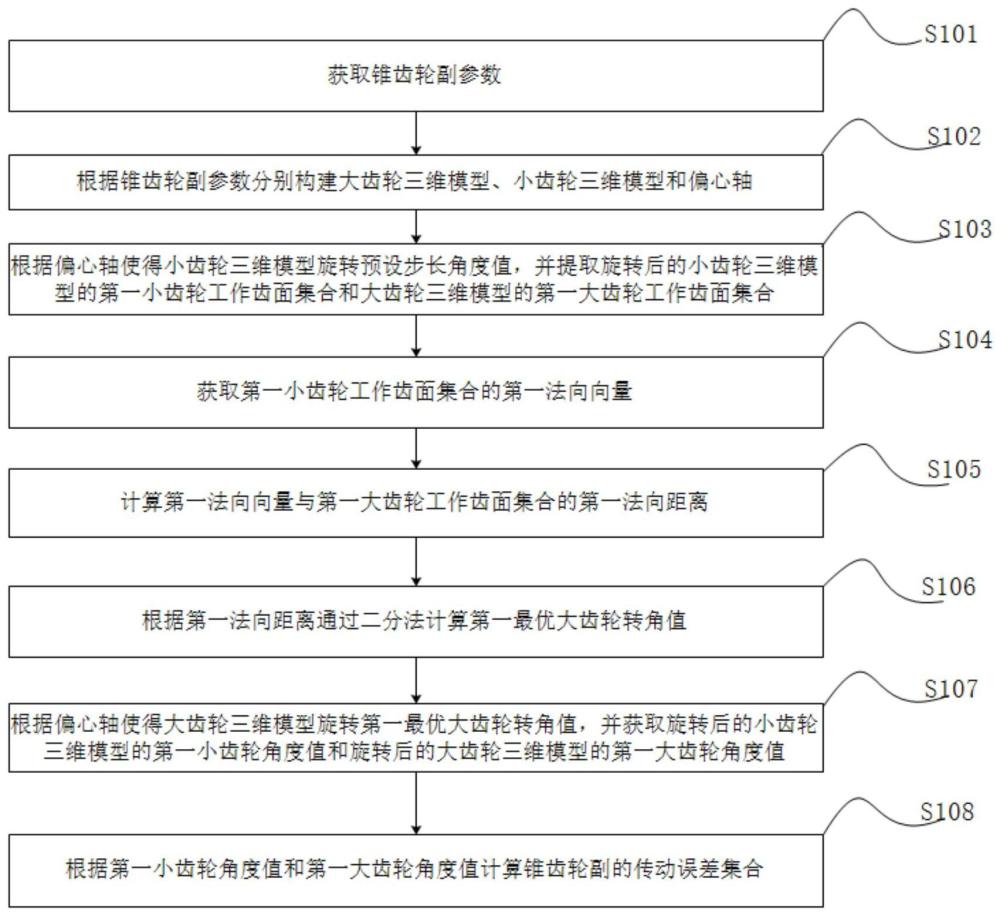
2、本发明的第一方面,提供了一种锥齿轮副传动误差的计算方法,包括如下步骤:
3、获取锥齿轮副参数;
4、根据所述锥齿轮副参数分别构建大齿轮三维模型、小齿轮三维模型和偏心轴;
5、根据所述偏心轴使得所述小齿轮三维模型旋转预设步长角度值,并提取旋转后的小齿轮三维模型的第一小齿轮工作齿面集合和大齿轮三维模型的第一大齿轮工作齿面集合;
6、获取所述第一小齿轮工作齿面集合的第一法向向量;
7、计算所述第一法向向量与所述第一大齿轮工作齿面集合的第一法向距离;
8、根据所述第一法向距离通过二分法计算第一最优大齿轮转角值;
9、根据所述偏心轴使得所述大齿轮三维模型旋转所述第一最优大齿轮转角值,并获取旋转后的小齿轮三维模型的第一小齿轮角度值和旋转后的大齿轮三维模型的第一大齿轮角度值;
10、根据所述第一小齿轮角度值和所述第一大齿轮角度值计算所述锥齿轮副的传动误差集合。
11、根据本发明实施例的控制方法,至少具有如下有益效果:
12、本方法首先根据锥齿轮副参数分别构建大齿轮三维模型、小齿轮三维模型和偏心轴;根据偏心轴使得小齿轮三维模型旋转预设步长角度值,并提取旋转后的小齿轮三维模型的第一小齿轮工作齿面集合和大齿轮三维模型的第一大齿轮工作齿面集合;通过以这两个集合为之后的啮合仿真过程的对象,而不再以大小齿轮的三维实体为对象,从而简化了运算,再获取第一小齿轮工作齿面集合的第一法向向量;计算第一法向向量与第一大齿轮工作齿面集合的第一法向距离;根据第一法向距离通过二分法计算第一最优大齿轮转角值;通过利用迭代计算思想来达到三维模型实时啮合功能,最后根据第一小齿轮角度值和第一大齿轮角度值计算锥齿轮副的传动误差集合,通过以预设步长角度值来逐次计算出偏心情况下的大小轮转过的角度,从而计算传动误差,保证了计算结果的准确率的同时提高了计算速度。
13、根据本发明的一些实施例,所述根据所述第一小齿轮角度值和所述第一大齿轮角度值计算所述锥齿轮副的传动误差集合,包括:
14、获取所述小齿轮三维模型的旋转总角度,并将所述第一小齿轮角度值作为初始小齿轮角度值,所述第一大齿轮角度值作为初始大齿轮角度值;
15、当所述小齿轮三维模型的旋转总角度小于预设小轮总旋转角度,根据所述偏心轴使得所述小齿轮三维模型再旋转所述预设步长角度值,并提取旋转后的小齿轮三维模型的第二小齿轮工作齿面集合和大齿轮三维模型的第二大齿轮工作齿面集合;
16、获取所述第二小齿轮工作齿面集合的第二法向向量;
17、计算所述第二法向向量与所述第二大齿轮工作齿面集合的第二法向距离;
18、根据所述第二法向距离通过二分法计算第二最优大齿轮转角值;
19、根据所述偏心轴使得所述大齿轮三维模型旋转所述第二最优大齿轮转角值,并获取再旋转后的小齿轮三维模型的第二小齿轮角度值和旋转后的大齿轮三维模型的第二大齿轮角度值;
20、根据所述初始小齿轮角度值、所述初始大齿轮角度值、所述第二小齿轮角度值和所述第二大齿轮角度值计算所述锥齿轮副的第一传动误差,依次类推,直至所述小齿轮三维模型的旋转总角度等于所述预设小轮总旋转角度,得到传动误差集合。
21、根据本发明的一些实施例,所述根据所述初始小齿轮角度值、所述初始大齿轮角度值、所述第二小齿轮角度值和所述第二大齿轮角度值采用如下公式计算所述锥齿轮副的第一传动误差:
22、
23、其中,δ为第一传动误差,为第二大齿轮角度值,为初始大齿轮角度值,为第二小齿轮角度值,为初始小齿轮角度值,z2为大齿轮齿数,z1为小齿轮齿数。
24、根据本发明的一些实施例,所述根据所述第一法向距离通过二分法计算第一最优大齿轮转角值,包括:
25、当所述第一法向距离的最小值达到预设值,则获取当前时刻所述大齿轮三维模型的第一旋转角度;
26、将所述当前时刻所述大齿轮的第一旋转角度作为所述第一最优大齿轮转角值。
27、根据本发明的一些实施例,所述根据所述第一法向距离通过二分法计算第一最优大齿轮转角值,还包括:
28、当所述第一法向距离的最小值大于所述预设值,则获取当前时刻所述大齿轮三维模型的第二旋转角度,并增大所述第二旋转角度;直至所述大齿轮三维模型旋转至第三旋转角度,以使得第三法向距离的最小值小于所述预设值,其中,所述第三法向距离通过提取旋转后的小齿轮三维模型的第三小齿轮工作齿面集合和大齿轮三维模型的第三大齿轮工作齿面集合,获取所述第三小齿轮工作齿面集合的第三法向向量,并计算所述第三法向向量与所述第三大齿轮工作齿面集合的法向距离得到;
29、根据所述第二旋转角度和所述第三旋转角度通过二分法计算第四旋转角度,以使得所述大齿轮旋转至所述第四旋转角度时的第四法向距离的最小值等于所述预设值,其中,所述第四法向距离通过提取旋转后的小齿轮三维模型的第四小齿轮工作齿面集合和大齿轮三维模型的第四大齿轮工作齿面集合,获取所述第四小齿轮工作齿面集合的第四法向向量,并计算所述第四法向向量与所述第四大齿轮工作齿面集合的法向距离得到;
30、将所述第四旋转角度作为所述第一最优大齿轮转角值。
31、根据本发明的一些实施例,所述根据所述第一法向距离通过二分法计算第一最优大齿轮转角值,还包括:
32、当所述第一法向距离的最小值小于所述预设值,则获取当前时刻所述大齿轮三维模型的第五旋转角度,并增大所述第五旋转角度;直至所述大齿轮三维模型旋转至第六旋转角度,以使得第六法向距离的最小值大于所述预设值,其中,所述第六法向距离通过提取旋转后的小齿轮三维模型的第六小齿轮工作齿面集合和大齿轮三维模型的第六大齿轮工作齿面集合,获取所述第六小齿轮工作齿面集合的第六法向向量,并计算所述第六法向向量与所述第三大齿轮工作齿面集合的法向距离得到;
33、根据所述第五旋转角度和所述第六旋转角度通过二分法计算第七旋转角度,以使得所述大齿轮旋转至所述第七旋转角度时的第七法向距离的最小值等于所述预设值,其中,所述第七法向距离通过提取旋转后的小齿轮三维模型的第七小齿轮工作齿面集合和大齿轮三维模型的第七大齿轮工作齿面集合,获取所述第七小齿轮工作齿面集合的第七法向向量,并计算所述第七法向向量与所述第七大齿轮工作齿面集合的法向距离得到;
34、将所述第七旋转角度作为所述第一最优大齿轮转角值。
35、根据本发明的一些实施例,所述获取锥齿轮副参数,包括:
36、获取锥齿轮副的大小轮齿数、轴交角、偏置距、小轮水平轮位误差、大轮水平轮位误差、垂直轮位误差、轴交角误差、大小齿轮的偏心轴在各自体坐标系中的位置坐标、小轮转过的总角度和小轮每步旋转的角度步长。
37、本发明的第二方面,提供一种锥齿轮副传动误差的计算系统,所述锥齿轮副传动误差的计算系统包括:
38、数据获取模块,用于获取锥齿轮副参数;
39、模型构建模块,用于根据所述锥齿轮副参数分别构建大齿轮三维模型、小齿轮三维模型和偏心轴;
40、齿面集合提取模块,用于根据所述偏心轴使得所述小齿轮三维模型旋转预设步长角度值,并提取旋转后的小齿轮三维模型的第一小齿轮工作齿面集合和大齿轮三维模型的第一大齿轮工作齿面集合;
41、第一法向向量获取模块,用于获取所述第一小齿轮工作齿面集合的第一法向向量;
42、第一法向距离计算模块,用于计算所述第一法向向量与所述第一大齿轮工作齿面集合的第一法向距离;
43、第一最优大齿轮转角值计算模块,用于根据所述第一法向距离通过二分法计算第一最优大齿轮转角值;
44、齿轮角度值获取模块,用于根据所述偏心轴使得所述大齿轮三维模型旋转所述第一最优大齿轮转角值,并获取旋转后的小齿轮三维模型的第一小齿轮角度值和旋转后的大齿轮三维模型的第一大齿轮角度值;
45、传动误差计算模块,用于根据所述第一小齿轮角度值和所述第一大齿轮角度值计算所述锥齿轮副的传动误差集合。
46、本系统首先根据锥齿轮副参数分别构建大齿轮三维模型、小齿轮三维模型和偏心轴;根据偏心轴使得小齿轮三维模型旋转预设步长角度值,并提取旋转后的小齿轮三维模型的第一小齿轮工作齿面集合和大齿轮三维模型的第一大齿轮工作齿面集合;通过以这两个集合为之后的啮合仿真过程的对象,而不再以大小齿轮的三维实体为对象,从而简化了运算,再获取第一小齿轮工作齿面集合的第一法向向量;计算第一法向向量与第一大齿轮工作齿面集合的第一法向距离;根据第一法向距离通过二分法计算第一最优大齿轮转角值;通过利用迭代计算思想来达到三维模型实时啮合功能,最后根据第一小齿轮角度值和第一大齿轮角度值计算锥齿轮副的传动误差集合,通过以预设步长角度值来逐次计算出偏心情况下的大小轮转过的角度,从而计算传动误差,保证了计算结果的准确率的同时提高了计算速度。
47、本发明的第三方面,提供了一种锥齿轮副传动误差的计算电子设备,包括至少一个控制处理器和用于与所述至少一个控制处理器通信连接的存储器;所述存储器存储有可被所述至少一个控制处理器执行的指令,所述指令被所述至少一个控制处理器执行,以使所述至少一个控制处理器能够执行上述的锥齿轮副传动误差的计算方法。
48、本发明的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行上述的锥齿轮副传动误差的计算方法。
49、需要注意的是,本发明的第二方面至第四方面与现有技术之间的有益效果与上述的一种锥齿轮副传动误差的计算系统与现有技术之间的有益效果相同,此处不再细述。
50、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!