基于机器视觉的腕带材料精准裁切控制方法与流程
本技术涉及机器视觉,具体涉及基于机器视觉的腕带材料精准裁切控制方法。
背景技术:
1、随着科技的发展,腕带材料的加工逐渐开始采用机械的方式,腕带制作的众多流程都采用机械的方式进行。在裁切流程中,通常会预先设计好腕带的裁切样式,并在待裁切的腕带材料中进行定位点标记,最后裁切机根据拍摄到的腕带材料图像利用机器视觉进行裁切定位,在定位完成后裁切系统对裁切刀发出裁切信号,控制裁切刀根据预设样式进行工作,进而对腕带材料进行精准裁切。而由于裁切机的工作环境不尽相同,在裁切前拍摄腕带材料图像时受到的环境因素影响较大,例如工作间的灰尘堆积、机器和工作人员工作时的倒影、工作间的光源位置影响等,导致拍摄出的腕带材料图像存在较多噪声,从而导致裁切系统对腕带材料裁切点的定位不准确,所以通常情况下会对拍摄出的腕带材料图像利用图像去噪算法进行去噪。
2、目前在众多去噪算法中,nlm算法不仅考虑了图像的局部信息,还利用整个图像的信息进行去噪,有着较好的去噪效果以及较好的细节保留效果,因而被广泛使用。然而,由于nlm算法需要计算更多的图像信息,因而计算量较大,且参数选择的准确性也在很大程度上影响去噪效果。
技术实现思路
1、为了解决上述技术问题,本发明提供基于机器视觉的腕带材料精准裁切控制方法,以解决现有的问题。
2、本发明的基于机器视觉的腕带材料精准裁切控制方法采用如下技术方案:
3、本发明一个实施例提供了基于机器视觉的腕带材料精准裁切控制方法,该方法包括以下步骤:
4、采集待裁切腕带材料图像并进行预处理;
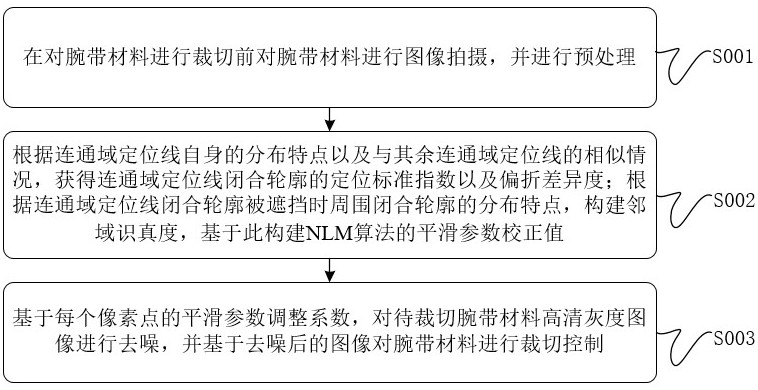
5、对待裁切腕带灰度图像进行边缘检测并轮廓跟踪得到各闭合轮廓;获取各闭合轮廓的分析窗口及窗口中心点的lbp值;根据各闭合轮廓分析窗口中心点的横坐标差异构建横向间隔偏离度;对于纵坐标差异采用横向间隔偏离度的构建方法获取纵向间隔偏离度;根据横向间隔偏离度、纵向间隔偏离度及窗口中心点的lbp值得到各闭合轮廓的定位标准指数;获取各闭合轮廓的各组以及轮廓斜率序列;根据各闭合轮廓的轮廓斜率序列中斜率之间的差异以及各闭合轮廓的组数差异得到各闭合轮廓的偏折差异度;获取各闭合轮廓的八邻域闭合轮廓;根据闭合轮廓的八邻域闭合轮廓的定位标准指数以及偏折差异度得到闭合轮廓的邻域识真度;根据各闭合轮廓的定位标准指数、偏折差异度以及邻域识真度得到各闭合轮廓的平滑参数校正值;预设nlm算法的初始平滑系数,根据平滑参数校正值以及初始平滑系数得到调整后nlm算法去噪过程的平滑参数;
6、结合改进的nlm算法对待裁切腕带灰度图像进行去噪,将去噪后图像中提取的连通域定位线作为bp神经网络的输入,输出裁切刀裁切位移坐标点数据完成腕带材料的裁切控制。
7、优选的,所述获取各闭合轮廓的分析窗口及窗口中心点的lbp值,包括:
8、将各闭合轮廓的最小外接矩形作为各闭合轮廓的分析窗口,将所述最小外接矩形的中心点作为窗口中心点,将分析窗口中各像素点的灰度值作为lbp算法的输入,输出为窗口中心点的lbp值。
9、优选的,所述根据各闭合轮廓分析窗口中心点的横坐标差异构建横向间隔偏离度,包括:
10、分别计算第i个闭合轮廓分析窗口中心点与其他各闭合轮廓中心点的横坐标之间的差值,计算第i个闭合轮廓分析窗口中心点的所有所述差值的均值;分别获取各差值与所述均值的比值,将所述比值的和值作为第i个闭合轮廓分析窗口的横向间隔偏离度。
11、优选的,所述根据横向间隔偏离度、纵向间隔偏离度及窗口中心点的lbp值得到各闭合轮廓的定位标准指数,包括:
12、对于第i个闭合轮廓分析窗口,将横向间隔偏离度与纵向间隔偏离度的乘积作为以自然常数为底数的指数函数的负指数;分别计算第i个闭合轮廓分析窗口的lbp值与其他各窗口中心点的lbp值的比值,分别获取1减去各所述比值的计算结果,将所有所述计算结果的和值作为分母,将所述指数函数的计算结果作为分子,分子与分母的比值作为第i个闭合轮廓的定位标准指数。
13、优选的,所述获取各闭合轮廓的各组以及轮廓斜率序列,包括:
14、以闭合轮廓的中心点为起点向右做水平线,将与闭合轮廓的交点作为起始点,获取所述起始点的下方且与起始点相邻的闭合轮廓像素点,将起始点和所述与起始点相邻的闭合轮廓像素点作为一组,将所述与起始点相邻的闭合轮廓像素点作为新的起始点,继续遍历闭合轮廓的各像素点,获取闭合轮廓的各组;
15、结合各组内像素点的坐标计算各组的斜率,将闭合轮廓所有组的斜率组成闭合轮廓的轮廓斜率序列。
16、优选的,所述各闭合轮廓的偏折差异度,包括:
17、对于第i个闭合轮廓;
18、计算第i个闭合轮廓与其余所有闭合轮廓的组数差值绝对值的和值,记为第一和值;
19、计算第i个闭合轮廓与其他任一闭合轮廓的轮廓斜率序列中对应斜率的差值绝对值的和值,记为和值因子,获取第i个闭合轮廓与其他所有闭合轮廓的所述和值因子的和值,记为第二和值;
20、将第一和值与第二和值的乘积作为第i个闭合轮廓的偏折差异度。
21、优选的,所述获取各闭合轮廓的八邻域闭合轮廓,包括:
22、将各闭合轮廓作为当前闭合轮廓,计算当前闭合轮廓分析窗口中心点与其余各闭合轮廓分析窗口中心点的欧式距离,将欧式距离从小到大排序对应的前八个闭合轮廓作为当前闭合轮廓的八邻域闭合轮廓。
23、优选的,所述根据闭合轮廓的八邻域闭合轮廓的定位标准指数以及偏折差异度得到闭合轮廓的邻域识真度,包括:
24、获取第i个闭合轮廓的各八邻域闭合轮廓的定位标准指数、偏折差异度,第i个闭合轮廓的领域识真度表达式为:
25、;
26、式中,为第i个闭合轮廓的邻域识真度,分别为第i个闭合轮廓的第q个八邻域闭合轮廓的定位标准指数、偏折差异度,分别为第i个闭合轮廓的第o个八邻域闭合轮廓的定位标准指数、偏折差异度,是第i个闭合轮廓的八邻域闭合轮廓数量。
27、优选的,所述各闭合轮廓的平滑参数校正值,包括:
28、获取闭合轮廓的定位标准指数与领域识真度的乘积,将所述乘积与闭合轮廓的偏折差异度的比值作为闭合轮廓的平滑参数校正值。
29、优选的,所述根据平滑参数校正值以及初始平滑系数得到调整后的nlm算法去噪过程的平滑参数,包括:
30、将闭合轮廓的平滑参数校正值作为闭合轮廓上各闭合轮廓像素点的平滑参数调整系数,将非闭合轮廓上的各像素点的平滑参数调整系数设置为1;
31、将各像素点的平滑参数调整系数与初始平滑系数的乘积作为调整后的nim算法去噪过程的平滑参数。
32、本发明至少具有如下有益效果:
33、本发明通过分析腕带材料在裁切前连通域定位线的分布特点,构建定位标准指数以及偏折差异度,分析噪声遮挡时连通域定位线的周围图像特征,构建邻域识真度,最后改进nlm算法中权重公式内的平滑参数,使得在采用nlm算法对待裁切腕带材料高清灰度图像进行去噪时能够自适应地调整去噪强度,在减少计算量的同时获得更好的去噪效果,提高腕带材料裁切时的准确度。
- 还没有人留言评论。精彩留言会获得点赞!