一种基于YUV色彩空间和梯度特征相融合的阴影检测方法
本发明属于阴影检测领域,具体地说,本发明涉及一种基于yuv色彩空间和梯度特征相融合的阴影检测方法。
背景技术:
1、阴影是图像和视频中广泛存在的一种物理现象,是因为物体表面和光源之间存在了不透明遮挡物,导致物体表面上存在亮度低于相邻区域亮度而产生的一个黑暗的区域。在该区域中,来自光源的直接光会完全或部分地被遮挡物遮挡。如果光线被全部遮挡,阴影边界轮廓会比较清晰,这种阴影被称为本影。如果光线被部分遮挡,阴影区域轮廓模糊,呈现一种晕染的效果,这种阴影被称为半影。所以阴影分为两部分,即本影和半影。在实际的阴影图像中两类阴影一般都会存在。
2、阴影作为一个普遍存在的自然现象,一直是图像处理中的重点和难点。近些年来,阴影处理技术在计算机视觉领域已经取得了很大的进步。作为计算机视觉领域的一个重要的预处理步骤,阴影处理在目标检测、医学图像、航空影像等各个领域均有广泛的应用。
3、目前,针对单一光源产生的阴影处理算法研究是最多的,出现了许多经典算法。然而在实际图像处理中往往会遇到多个光源的情况,甚至还会出现半阴影和彩色阴影这种复杂情况,这种情况下经典算法将无能为力,然而值得一提的是如今几乎所有算法的提出都借用到经典算法的思路。其中,基于模型的方法需要对成像要素建模,通常需要对预先设置好的相机传感器响应参数建模。基于本征图像的阴影检测是把图像原有的rgb颜色空间转换到光照不敏感空间,光照不敏感空间变换后的图像在某种程度上对图像成像更容易检测到阴影区域。常见的光照不敏感空间有ycbcr颜色空间,hsv颜色空间和his颜色空间等。在hsv颜色空间中,阴影区域的亮度变化很大,但是色度和饱和度的变化并不明显,通过应用低频特征对阴影进行检测,可以获得良好的区分运动物体和阴影的效果。利用单一的色度空间检测阴影鲁棒性较差,本发明采用yuv色彩空间和梯度特征相融合的方法检测阴影能够提高阴影检测的精度。
4、对比文件(cn101236606a)公开了一种视频监控中的阴影消除方法及系统。本发明利用摄像头捕获的yuv图像直接进行运动检测和阴影检测,避免了常用的阴影检测方法中的色彩空间转化或者边缘检测操作,进一步提高了阴影检测的运算速度,有利于实时应用。
5、上述专利也是在yuv色彩空间中进行阴影检测,说明yuv色彩空间对于阴影检测具有重要作用,但是随着时代的发展,对于阴影检测的精度要求不断提高,为此本发明提供了一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,提高了阴影检测的精度。
技术实现思路
1、本发明旨在克服现有技术的不足,提供了一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,以达到提高阴影检测的精度和鲁棒性的目的。
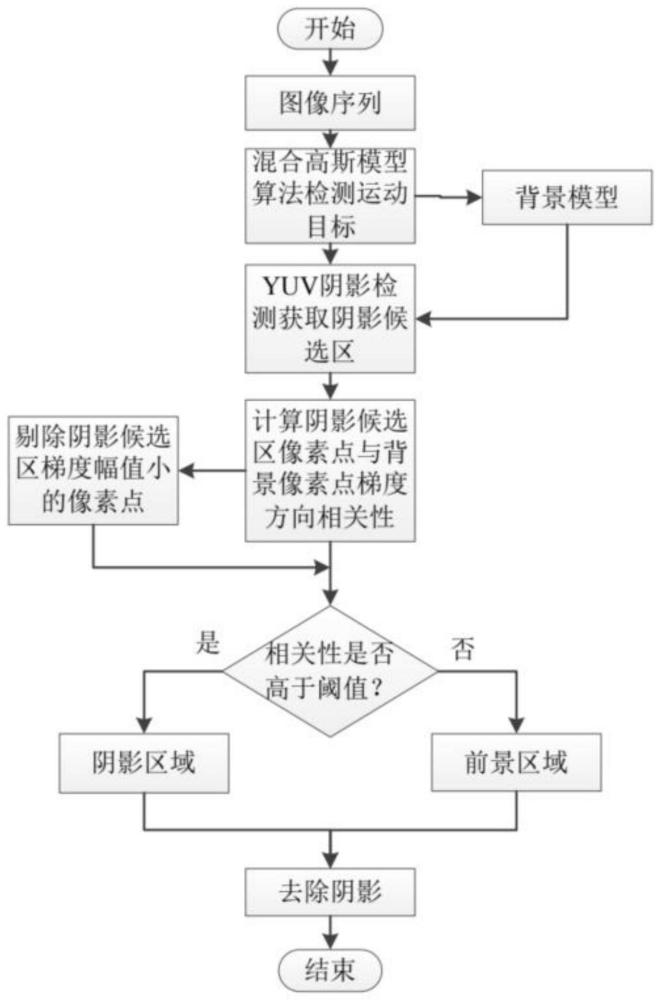
2、为了实现上述目的,本发明采取的技术方案为:一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,所述方法包括以下步骤:
3、(1)输入含阴影的图像,提取所述图像yuv色彩空间的三通道分量值;
4、(2)通过含有阴影的前景图像和不含前景的背景图像yuv分量变化比率来检测阴影像素点的位置;
5、(3)在yuv色彩空间利用亮度和色度信息筛选出候选阴影像素点;
6、(4)从所述候选阴影像素点中寻找像素连接的部分,每个部分分别对应不同的候选阴影区域;
7、(5)计算所述候选阴影区域的像素点的梯度和方向;
8、(6)计算背景和前景图像之间的梯度方向差值;
9、(7)根据所述梯度方向差值计算出所述候选阴影区域像素点与背景像素点的梯度方向相关性;
10、(8)根据所述梯度方向相关性判断所述候选阴影区域是阴影区域还是前景区域。
11、进一步,在所述步骤(1)中,通过下列公式提取yuv色彩空间的三通道分量值:
12、
13、其中,fy、fu、fv分别表示yuv色彩空间三通道分量值,fr、fg、fb表示rgb颜色空间的各通道分量值。
14、进一步,在所述步骤(2)中,所述阴影像素点的位置通过下列公式进行检测:
15、
16、其中,g(x,y)表示检测出的阴影像素点,和分别表示图像的前景像素和背景像素在yuv色彩空间下的各分量值,和对应图像中前景和背景颜色空间三分量的阴影检测阈值。
17、在所述步骤(3)中,通过设置前景阈值和背景阈值筛选出候选阴影像素点,所述前景阈值和背景阈值根据背景和前景的光照、噪声情况进行调整。
18、进一步,在所述步骤(5)中,所述候选阴影区域像素点的梯度和方向通过以下公式得到:
19、
20、
21、其中,和θxy分别表示像素点(x,y)的的梯度大小和方向。考虑噪声影响,根据前景图像噪声的情况设置梯度阈值,将和梯度阈值进行比较,保留大于梯度阈值的阴影像素点。
22、进一步,在所述步骤(6)中,通过将梯度方向转换为角的距离计算背景和前景图像之间的梯度方向差值,公式表示如下:
23、
24、其中,和分别表示前景图像和背景图像中像素点x和y方向的梯度值,表示梯度方向差值。
25、进一步,在所述步骤(7)中,所述梯度方向相关性通过下述公式得到:
26、
27、其中,c为梯度方向相关性,n表示所述候选阴影区域中的总像素个数,
28、表示当梯度方向差值小于阈值τ时结果为1,反之则为0。
29、进一步,在所述步骤(8)中,当所述梯度方向相关性大于选定的阴影区域像素点占候选阴影区域中的总像素个数的比值时,则所述候选阴影区域为阴影区域;当所述梯度方向相关性小于等于选定的阴影区域像素点占候选阴影区域中的总像素个数的比值时,则所述候选阴影区域为前景区域,所述选定的阴影区域像素点占候选阴影区域中的总像素个数的比值由人为提前设定。
30、本发明的技术效果为:(1)基于yuv色彩空间获取阴影区域,提高阴影检测鲁棒性;(2)结合梯度特征进行阴影检测,提高了阴影检测的精度。
技术特征:
1.一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:所述方法包括以下步骤:
2.根据权利要求1所述的一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:在所述步骤(1)中,通过下列公式提取yuv色彩空间的三通道分量值:
3.根据权利要求1所述的一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:在所述步骤(2)中,所述阴影像素点的位置通过下列公式进行检测:
4.根据权利要求1所述的一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:在所述步骤(3)中,通过设置前景阈值和背景阈值筛选出候选阴影像素点,所述前景阈值和背景阈值根据背景和前景的光照、噪声情况进行调整。
5.根据权利要求1所述的一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:在所述步骤(5)中,所述候选阴影区域像素点的梯度和方向通过以下公式得到:
6.根据权利要求5所述的一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:根据前景图像噪声的情况设置梯度阈值,将和梯度阈值进行比较,保留大于梯度阈值的阴影像素点。
7.根据权利要求1所述的一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:在所述步骤(6)中,通过将梯度方向转换为角的距离计算背景和前景图像之间的梯度方向差值,公式表示如下:
8.根据权利要求1所述的一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:在所述步骤(7)中,所述梯度方向相关性通过下述公式得到:
9.根据权利要求1所述的一种基于yuv色彩空间和梯度特征相融合的阴影检测方法,其特征在于:在所述步骤(8)中,当所述梯度方向相关性大于选定的阴影区域像素点占候选阴影区域中的总像素个数的比值时,则所述候选阴影区域为阴影区域;当所述梯度方向相关性小于等于选定的阴影区域像素点占候选阴影区域中的总像素个数的比值时,则所述候选阴影区域为前景区域,所述选定的阴影区域像素点占候选阴影区域中的总像素个数的比值由人为提前设定。
技术总结
本发明公开了一种基于YUV色彩空间和梯度特征相融合的阴影检测方法,属于阴影检测领域。本发明通过YUV色彩空间从输入的图像中获取了候选阴影区域,再结合梯度特征计算出了所述候选阴影区域像素点与背景像素点的梯度相关性,最后根据所述梯度方向相关性判断所述候选阴影区域是阴影区域还是前景区域。本发明基于YUV色彩空间和梯度特征的融合,提高了阴影检测的精度和鲁棒性。
技术研发人员:李胜,朱佳伟,刘正男,潘玥,李津津
受保护的技术使用者:安徽信息工程学院
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!