一种混合动力系统动态协调控制方法
本发明涉及一种混合动力系统动态协调控制方法,属于混合动力系统;尤其涉及一种基于混合动力系统的模式切换协调控制方法。
背景技术:
1、混合动力汽车在行驶时可以根据不同的工况选择合适的工作模式,以此减少排放提高燃油经济性。针对混合动力系统,在纯电动模式和混合动力模式之间切换时,发动机的响应速度较慢,电机的响应速度相对较快,常常伴随着转矩波动。此外,发动机转矩的实时数据难以获取,动力源的转矩波动全部传递到输出轴,容易产生巨大的纵向冲击。因此,针对模式切换过程产生的纵向冲击需要设计合适的动态协调控制方法,使车辆在各种工况行驶时满足整车驾驶平顺性、动力性等性能。
技术实现思路
1、本发明的目的是提供一种混合动力系统动态协调控制方法,用以解决现有混合动力系统模式切换过程存在纵向冲击的问题。
2、为实现上述目的,本发明的方案包括:
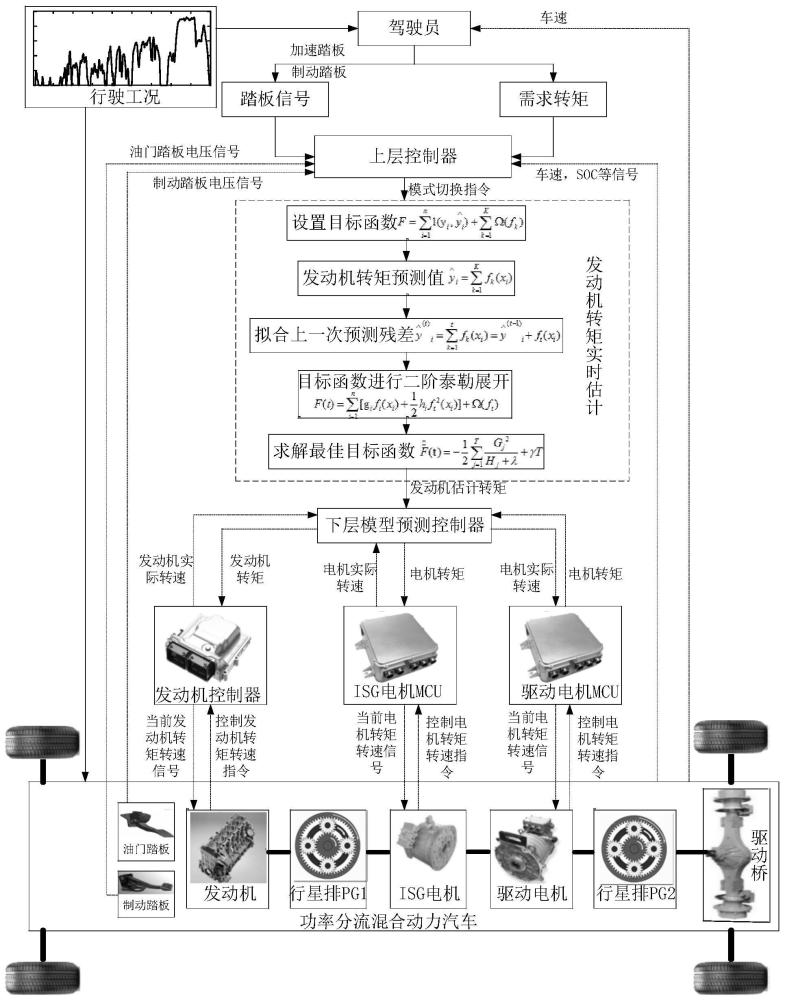
3、本发明的一种混合动力系统动态协调控制方法,包括如下步骤:
4、1)预测混合动力系统中发动机转矩的实时估计值;
5、2)根据模型预测协调控制策略得到发动机转速、电机转矩及电机转矩变化率的约束关系,通过将控制目标及约束关系转化为二次规划问题,以跟踪发动机转速;所述模型预测协调控制策略是基于所述发动机转矩的实时估计值与传动系统的运动学、动力学关系得到的;
6、3)将理想的发动机转速输入到pid控制器,计算出补偿转矩,对发动机进行补偿。
7、本发明提出一种全新的混合动力系统动态协调控制方法,基于实时估计的转矩值搭建模型预测控制器使发动机快速平稳地启动,减小输出轴的转矩波动,获得预测的发动机转速,并根据发动机转矩估计值和发动机转速预测值通过pid控制器计算出电机补偿转矩,用于在纯电动与混合动力模式之间的切换中对发动机进行补偿,降低切换时间的基础上有效降低了模式切换过程中的整车纵向冲击度,提高了驾驶平顺性。
8、进一步地,步骤1)中,通过如下步骤预测混合动力系统发动机转矩的实时估计值:实时采集发动机转矩关键特征变量,输入到预先建立的用于发动机转矩估计的预测模型,得到混合动力系统发动机转矩的实时估计值;所述发动机转矩关键特征变量包括发动机转速、发动机转速变化率、节气门开度、节气门开度变化率。
9、本发明根据混合动力系统行驶数据,获取影响发动机转矩关键特征变量的历史运行数据;具体包括:发动机转速、发动机转速变化率、节气门开度、节气门开度变化率。行驶数据包括车速和电池荷电状态信息。
10、进一步地,所述预测模型通过如下步骤建立:
11、利用所述发动机转矩关键特征变量的历史运行数据,训练构建的xgboost回归模型,通过调节xgboost回归模型的函数和参数,直至xgboost回归模型输出最优转矩,完成所述预测模型的建立。
12、将发动机转速、发动机转速变化率、节气门开度、节气门开度变化率关键特征变量划分为训练集和验证集,将70%的数据用于训练,30%的数据用于验证。训练集输入至构建的发动机转矩估计的xgboost回归模型,验证集对训练完成的xgboost回归模型的预测准确性进行验证。
13、本发明采用xgboost算法对发动机转矩进行实时估计,运算速度较快,减少了模式切换的时间。
14、进一步地,所述xgboost回归模型的目标函数为:
15、
16、其中,l为凸损失函数,yi表示发动机转矩真实值,表示发动机转矩预测值,n是样本总数,ω(fk)表示规则惩罚项,k是决策树的数量。
17、进一步地,所述规则惩罚项通过如下公式计算:
18、
19、其中,t表示树中的叶子节点个数,ω是节点上的预测值,γ表示惩罚系数,λ是正则项系数。
20、进一步地,构建的xgboost回归模型的训练包括:
21、发动机转矩预测值为:
22、
23、其中,fk是回归决策树,表示每棵树都有与之对应的数据进行输出;
24、进行迭代:
25、
26、对目标函数进行二阶泰勒展开:
27、
28、其中,是一阶导数,是二阶导数;
29、最佳分裂特征:
30、
31、利用公式验证所选发动机转矩值是否合适。
32、进一步地,步骤2)中,所述模型预测协调控制策略的步骤包括:
33、基于动力系统的运动学和动力学关系,搭建状态空间方程:
34、
35、其中:x为状态变量,a为系统状态矩阵,b为系统控制矩阵,c为系统输出矩阵,d为系统扰动矩阵,y为输出变量,u为控制变量,d为扰动变量;
36、将上述状态空间方程按采样周期t离散化,得到离散状态方程:
37、
38、定义控制时域v小于预测时域n,设:控制变量在控制时域外不变并且测量到的扰动在k时刻后保持不变;
39、可以得到预测时域内的输出预测公式为:
40、
41、式中:
42、考虑系统的控制要求,则优化目标函数可描述为:
43、
44、其中,j是总的优化目标,优化目标的第一项表示模式切换时发动机快速启动要求,第二项表示isg电机的转矩变化;yref(k+1)=[yref(k+1)yref(k+2)…yref(k+n)]t,yref为参考输出,即发动机目标转速;qy为系数加权矩阵;ru为权重矩阵;
45、所述混合动力系统中电机的转矩u(k)约束关系:
46、umin(k+i)<u(k+i)<umax(k+i)
47、所述混合动力系统中电机的转矩变化量δu(k)约束关系:
48、δumin(k+i)<δu(k+i)<δumax(k+i)
49、所述混合动力系统中发动机转速y(k)约束关系:
50、ymin(k+i)<y(k+i)<ymax(k+i)。
51、进一步地,将控制目标及约束关系转化为二次规划问题求解:
52、
53、控制混合动力系统中电机响应所需转矩以控制发动机转速,并输出下一时刻发动机转速预测值。
54、进一步地,步骤3)中,在一个控制周期,将实时发动机转速作为待控变量,则理想的发动机转速为:
55、
56、其中,为发动机预测转速,ωe为发动机实际转速;
57、本发明理想的发动机转速由mpc控制器输出的发动机转速预测值与发动机转速实际值求出;
58、所述补偿转矩为:
59、
60、其中,kp为发动机转速误差的比例系数,ki为发动机转速误差的积分系数,kd为发动机转速误差的微分系数。
61、本发明提出的一种基于机器学习的混合动力系统模式切换动态协调控制方法,利用xgboost算法对发动机转矩进行实时观测,观测精度高并且避免了过拟合问题,同时兼顾了发动机转矩响应的滞后性,降低了整车纵向冲击度,缩短了模式切换时间。
- 还没有人留言评论。精彩留言会获得点赞!