一种分布式电动汽车功能Agent行为意图一致性判定方法
本发明涉及汽车智能交互领域与车辆自动驾驶领域,特别是涉及一种分布式电动汽车功能agent行为意图一致性判定方法。
背景技术:
1、当前,汽车智能底盘电控系统发展日趋多样化,然而,由于缺乏一个合理的整体模型和控制架构,各基本控制单元功能矛盾愈加明显,即当前车辆的各种电控功能往往采用相对独立的开发模式,所以难以完成分布式电动汽车的“智能”协调控制。在车辆自动驾驶过程中底盘各功能单元的执行意图产生冲突时,往往会造成分布式电动汽车执行冗余或者各自为政的情况,因此准确识别控制单元的功能意图,对于为自动驾驶汽车综合的“智能”协调汽车底盘在各种环境要求下的各种控制功能和更为舒适的运动控制具有极为重要的作用。特别是将分布式电动汽车的整个底盘系统的电控单元进行合理的功能划分,并采用agent语言进行描述,构建系统集成控制的最小单元,从而更好的识别功能单元执行意图,能够保障车辆的安全高效行驶。
2、申请号为201910730626.0的中国专利,公开了“一种无人驾驶操控系统的驾驶员意图理解模块”;论述了基于无人驾驶系统的驾驶员意图理解方法,能够显著降低操控系统的数据运算量,提高处理效率。其存在只通过信号采集模块采集驾驶员意图,由于所获取意图的单一性以及获取数据的不便性,使得该方法无法更好的满足汽车底盘在各种环境要求下的各种控制功能,并且存在智能层级不高的问题。
技术实现思路
1、本发明要解决的技术问题是提供一种够准确识别功能单元的行为意图,有效消除执行单元的耦合冲入,可执行效率高,实用性强的分布式电动汽车功能agent行为意图一致性判定方法。
2、为了解决上述技术问题,本发明采用如下技术方案:
3、一种分布式电动汽车功能agent行为意图一致性判定方法,包含以下步骤:
4、(1)针对分布式驱动电动汽车按照电控单元进行功能划分,将划分出的功能区域采用agent语言进行描述;
5、(2)针对不同的功能agent系统构建表征功能系统执行操作的动力学方程;
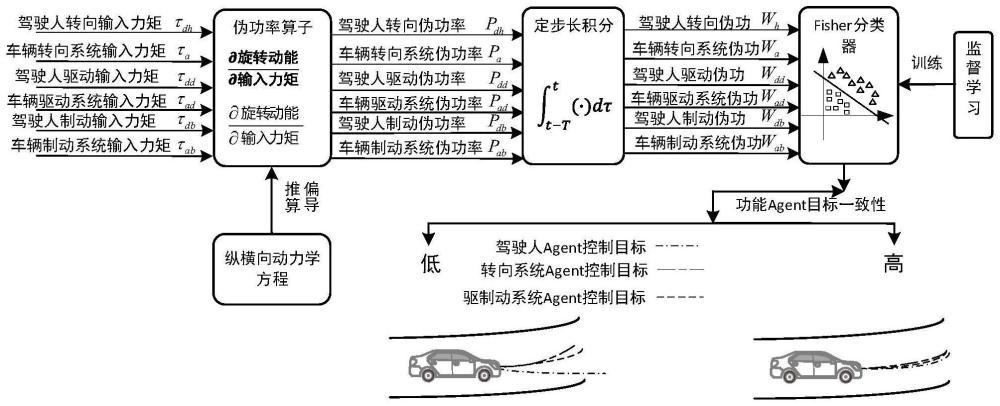
6、(3)利用分布式电动汽车纵横向动力学方程构建功能agent系统伪功率算子,实时求解;
7、(4)建立基于fisher线性判别算法建立功能agent一致性的线性分类器,判定功能agent行为意图判定一致性等级。
8、步骤(2)针对不同的功能agent单元,构建表征功能agent单元执行操作的动力学方程,包括:
9、(21)构建驾驶人agent动力学方程,驾驶人的行为意图由其对分布式电动汽车的操纵输入力矩τd表示,其中包含转向力矩输入τdh、驱动力矩输入τdd、制动力矩输入τdb。
10、首先确定驾驶人转向力矩输入,将驾驶人与线控转向系统结合,可以得到驾驶人手力矩输入的动力学表达式:
11、
12、其中,jdam为转向系统的等效惯性、binter为转向系统阻尼,τf为转向系统摩擦力矩,τe为电机提供的转向阻力矩,δ为方向盘转角,sign()为符号函数,用于指出参数的正负号。
13、针对分布式电动汽车采用电子踏板对车辆驱制动进行控制,可根据不同的电子踏板开度确定车辆的驱制动力矩,因此驱/制动力矩的表达公式为:
14、
15、其中,δld为真实油门踏板开度δld-real与目标油门踏板开度δld-target的差值,δlb为真实制动踏板开度δlb-real与目标制动踏板开度δlb-target的差值,kb,ab,bb为制动力矩优化系数,kd,ad,bd为驱动力矩优化系数。根据车辆的控制需求,驾驶人输入驱制动力矩与电子踏板开度差值的增大关系分为三个阶段:1.驱制动力矩轻微增加阶段,对此开度曲线进行加权移动平均法平滑处理,改善电子踏板开度特性曲线的变化率,保证更好的驾驶体验感,2.线性增加驱制动力矩阶段,对电子踏板开度曲线进行简单平移法进行平滑处理,3.驱制动力矩增加饱和阶段
16、(22)构建转向功能agent动力学方程
17、针对分布式电动汽车线控转向系统,其转向agent的动力学表征可以采用转向执行电机的力矩输出作为表征转向控制行为意图的关键参数,其动力学表达式为:
18、τa=iaktη (3)
19、其中,τa为转向系统控制输出,ia为转向电机真实电流,kt为转向电机的转矩系数,η为机械效率。
20、(23)驱/制动功能agent动力学方程
21、针对分布式电动汽车四个车轮均独立可控,其驱制动力矩可由全矢量力矩控制,将驱动电机力矩响应作为表征驱/制动行为意图的关键参数,其动力学表达式为:
22、
23、其中,τall表示轮毂电机总输出力矩;τt为电机目标输出力矩;τmax为电机当前转速下最大输出力矩;τ为时间常数,可由驱动电机的力矩响应数据辨识获得。
24、步骤(3)中,基于伪功率算子设计包含如下:
25、(31)试验数据采集,应用车载传感器,针对分布式电动汽车功能agent,采集实试验数据,包括驾驶人手力矩、转向控制力矩、驱动踏板行程、制动踏板行程、方向盘转角、方向盘转速、轮毂电机制动力矩、轮毂电机驱动力矩、车速。
26、(32)实验数据处理,由于是通过不同传感器进行数据采集,采集到的部分数据不易直观的理解与观察,因此需要对数据进行单位转换,将方向盘转角与转速从弧度制转换为角度制,速度从m/s转换成km/h,将数据分为四类,驾驶人操纵数据、转向功能数据、驱动功能数据、制动功能数据,便于以后输入到四个功能agent区域进行识别。其中将各组数据里面的数据进行分段,每个时间段代表功能agent一段时间内的操纵行为,针对每个数据段,采用自适应卡尔曼滤波算法,剔除每个数据段中的异常值;
27、(33)针对执行单元的行为意图,需要对驾驶人agent、转向agent、驱/制动agent系统的瞬时伪功率进行计算。
28、驾驶人agent转向操纵瞬时伪功率表达式:
29、
30、其中,wh(t)为驾驶人转向操纵的瞬时伪功率,tw为周期时间,vy为车辆行驶的横向速度,t为运行时间;
31、驾驶人agent驱动操纵伪功率计算方法为:
32、
33、其中,wdd(t)为驾驶人的驱动操作瞬时伪功率,vx为车辆行驶的纵向速度;
34、驾驶人agent制动操纵伪功率计算方法为:
35、
36、其中,wdb(t)为驾驶人制动操纵瞬时伪功率;
37、转向系统agent瞬时伪功率计算方法为:
38、
39、其中,wa(t)为车辆辅助转向系统瞬时伪功率。
40、制/驱动系统agent瞬时伪功率计算方法为:
41、
42、其中,wab(t)为车辆驱动辅助系统瞬时伪功率,wad(t)为车辆制动辅助系统瞬时伪功率。
43、步骤(4)建立基于fisher线性判别算法建立功能agent一致性的线性分类器,判定功能agent行为意图判定一致性等级,包括:
44、(41)首先划分功能agent行为意图为转向意图、驱动意图、制动意图;选取功能agent行为意图判定关键参数为:转向意图参数wh,wa,驱动意图参数wdd,wad,制动意图参数wdb,wab。评判等级为两级(高、低)。
45、(42)对实验测得的3对行为意图判定关键参数,在2个等级标准范围内生成40组数据,其中每个等级的数据随机提取20组,前15组数据用于模型训练,后5组数据用于模型测试。
46、(43)根据(42)中的模型数据,选用fisher判定分析法对功能agent行为意图进行分类判定:
47、将(42)中的每对参数的行为意图一致性等级均分为2类,定义为和其中,i=1,2,3分别表示转向行为意图、制动行为意图和驱动行为意图。采用fisher判定方法对转向行为意图一致性进行分类。
48、给定转向行为数据集为yj瞬时功率所在的时刻,j=1,2,…,n,n表示总的样本个数,为转向瞬时功率。
49、设th表示转向行为意图一致性等级高类别的样例的集合,样本集合th的均值向量表示为设tl表示转向行为意图一致性等级低类别的样本集合,样本集合tl的均值向量表示为
50、假定分类直线为:
51、
52、其中,表示转向行为意图一致性判定样本的投影向量;表示转向行为意图一致性判定样本数据集;
53、转向行为意图一致性判定的样本类间散度为:
54、
55、sb表示向量与他自身的外积,也就是转向行为意图一致性判定的样本类间散度;
56、转向行为意图一致性判定的样本类内散度为:
57、
58、其中,sw为转向行为一致性判定样本的类内散度;
59、线性判别分析最大化目标为:
60、
61、其中,js为样本类间散度sb与样本类内散度sw的广义瑞利商。
62、重复步骤(54)得到制动判定样本的广义瑞利商jb和驱动样本的广义瑞利商jd。
63、通过上述理论,分别输入功能agent行为意图判定关键参数为:转向意图参数wh,wa,驱动意图参数wdd,wad,制动意图参数wdb,wab。通过fisher判定理论求解最优解,当且仅当转向意图、驱动意图、制动意图均一致时可判定当前各功能agent单元行为意图一致,判定行为意图一致性等级为高;否则判定行为意图一致性等级为低,此时需要个功能agent单元进行自主调节,直到得到行为意图一致性判定为高时进行机构执行,完成分布式电动汽车的智能协调控制。
64、以上设计,同时考虑了分布式电动汽车智能协调控制需求,根据需要对个功能agent进行调整,能够有效保证车辆安全。
65、与现有技术相比,本发明的有益效果是:
66、本发明在对分布式电动汽车电控单元行为意图进行一致性判定时,对分布式电动汽车电控单元进行合理的功能划分,并将其转换为agent语言进行描述,从而构建系统集成控制的最小单元,基于瞬时伪功率算子对功能agent单元行为意图进行识别解决了传统算法实时性差的问题,利用fisher判定分析法对功能agent行为意图进行一致性判定具有计算量小,实时性强,判定的行为意图结果比传统方法更安全、准确,能够为分布式电动汽车的高效、智能协调控制提供技术支持,同时在能准确识别功能单元行为意图的基础上,能够有效消除电控单元的执行耦合冲突,实用性强。
67、本发明分布式电动汽车功能agent行为意图一致性判定方法中划分功能区域,将不同功能单元的的功能区域划分为驾驶人功能区、转向功能区、驱/制动功能区,基于其功能区域建立对应的功能agent单元,其中驾驶人agent为能够精确表征驾驶人特性的智能体,包含思维特性和操纵特性;转向agent为能够自主控制转向以及精确响应的智能体,具有主动转向以及执行精度高的特性;驱/制动agent为能够分布式驱/制动控制的智能体,具有高效、分布式协同控制的特性。单个的功能agent是多agent系统的微观层次,具有反应性、自治性和灵活性;而功能agent之间的关系构成多agent系统的宏观层次,能够通过各层级的组织与协作,完成更高灵活性、环境适应性以及可扩展性的综合功能,这种协调控制思想非常适合分布式电动汽车的智能控制。
- 还没有人留言评论。精彩留言会获得点赞!