基于多特征融合的减速机运行状态检测方法、系统、设备及介质与流程
本发明涉及减速机故障诊断,特别涉及一种基于多特征融合的减速机运行状态检测方法、系统、设备及介质。
背景技术:
1、随着工业的快速发展,机械设备趋于大型化、复杂化和重要化。机械设备的健康问题越来越受到人们的关注。减速机广泛应用于风力发电、航空等工业领域,作为旋转机械设备来调节转速和扭矩。由于工业环境的特殊性,减速机的重要部件,如齿轮和轴承,通常在高速、重载的工业环境中长时间运行,经常导致齿轮箱故障。一旦发生故障,长期维护和高昂的维护成本是不可避免的,这将带来巨大的经济损失。
2、减速机及齿轮、齿轮箱、轴承等的故障均可以通过振动现象反映出来。齿轮箱常用的状态检测方法包括油液分析、振动分析、声发射分析等。其中,基于振动分析的方法利用振动信号实现齿轮箱的故障诊断。针对不同行业的减速机选择适合的信号采集传感器以及不同的信号提取方式可以采集和提取到能反映设备故障的振动信号,在这些低频、中频、高频振动信号中,包含了设备运行异常以及各类故障的有用信息,通过分析、处理这些信息,可以确定设备的故障状况。
3、公开号为cn114357663a的专利申请文件,提出了一种训练齿轮箱故障诊断模型方法、齿轮箱故障诊断方法,包括:获取齿轮箱所在机电系统中的电机电流信号;根据电流信号计算表征其复杂与突变程度的特征值;根据随机森林算法对特征值筛选,生成样本数据集;根据该数据集对深度强化学习网络模型训练,生成故障诊断模型,通过计算表征电流信号复杂程度和突变程度的特征值并筛选,提取与故障有关的特征数据;该发明对于原始信号的分析,是频域的单独分析,特征值不够全面,数据分析并不全面,使用傅里叶变换分析,未能考虑干扰分量的影响。
4、公开号为cn106586841a的专利申请文件,提出了一种起重装备减速机运行状态监测方法及系统,包括:采集被监测减速机运行时轴承的加速度信号并存储;根据预设的预警值及所述加速度信号对被监测减速机进行故障诊断,但该发明仅使用简单的预警值进行故障诊断,可能造成误判,故障诊断不够准确。
5、综上,现有技术中故障诊断与状态检测时未能考虑减速机故障的实际情况,训练模型进行故障诊断及状态检测时由于故障信号种类不足,模型泛化能力差,参数影响明显,难以在工厂中大规模应用。
技术实现思路
1、针对上述现有技术的不足,本发明的目的在于提供一种基于多特征融合的减速机运行状态检测方法、系统、设备及介质,利用减速机阈值对减速机实时运行过程中的异常确定,同时有效的利用所选的最优特征分量实现对减速机实时运行状态检测,提高了减速机异常检测与分析的准确率,同时大幅降低了计算机每次检测的计算成本。
2、为了实现上述目的,本发明所采用的技术方案是:
3、基于多特征融合的减速机运行状态检测方法,包括以下步骤:
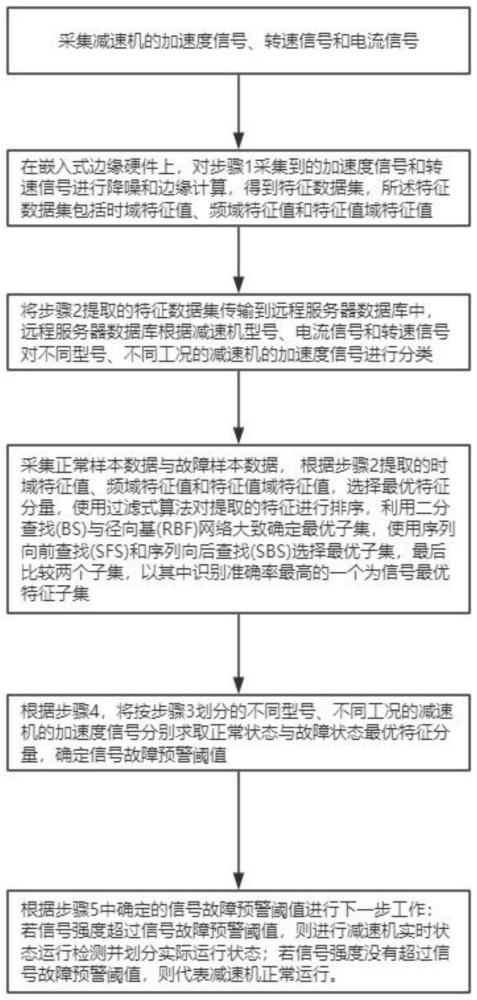
4、步骤1:采集减速机的加速度信号、转速信号和电流信号;
5、步骤2:在嵌入式边缘硬件上,对步骤1采集到的加速度信号和转速信号进行降噪和边缘计算,得到特征数据集,所述特征数据集包括时域特征值、频域特征值和特征值域特征值;
6、步骤3:将步骤2提取的特征数据集传输到远程服务器数据库中,远程服务器数据库根据减速机型号、电流信号和转速信号对不同型号、不同工况的减速机的加速度信号进行分类;
7、步骤4:采集正常样本数据与故障样本数据,根据步骤2提取的时域特征值、频域特征值和特征值域特征值,选择最优特征分量,使用过滤式算法对提取的特征进行排序,利用二分查找(bs)与径向基(rbf)网络大致确定最优子集,使用序列向前查找(sfs)和序列向后查找(sbs)选择最优子集,最后比较两个子集,以其中识别准确率最高的一个为信号最优特征子集;
8、步骤5:根据步骤4,将按步骤3划分的不同型号、不同工况的减速机的加速度信号分别求取正常状态与故障状态最优特征分量,确定信号故障预警阈值;
9、步骤6:根据步骤5中确定的信号故障预警阈值进行下一步工作:若信号强度超过信号故障预警阈值,则进行减速机实时状态运行检测并划分实际运行状态;若信号强度没有超过信号故障预警阈值,则代表减速机正常运行。
10、所述步骤1中,通过在减速机的输入轴的轴承座和输出轴的轴承座上安装边缘节点,高精度加速度传感器集成在边缘节点内部来采集加速度信号;通过将光电转速计外接在减速机的输入轴轴承座的边缘节点上采集转速信号;通过将电流传感器外接在单独的边缘节点上采集电流信号。
11、所述步骤4中信号最优特征子集提取具体为:
12、步骤4.1:采集每类减速机在正常工作下和在不同故障情况下的特征数据集,使用费舍尔分值法(fs)、距离评估技术(det)、信息增益(mi)和皮尔逊(person)相关系数这4种过滤式算法分别从距离测度、信息测度和相关性测度对故障特征进行评价,得到4组特征得分;
13、费舍尔分值法(fs)的计算公式:
14、
15、其中,x+、x-分别表示正样本和负样本,l+、l-分别表示正样本和负样本的个数;
16、距离评估技术(det):
17、欧氏距离
18、其中,qi表示最优特征子集的平均距离,pi表示最优特征子集的各个特征的距离;
19、信息增益(mi):基于信息测度对特征进行评价,是对特征的先验不确定性和预期的后验不确定性之间差异的度量,计算公式:
20、i(x;y)=h(y)-h(y|x),
21、其中,h(y)表示信息熵,h(x|y)表示条件熵;给定特征x和其对应的标签y;
22、皮尔逊(person)相关系数衡量特征和类之间的相关性,计算公式:
23、
24、其中,x和y分别对给定特征及其对应的标签;
25、步骤4.2:按照步骤4.1得出的特征得分对特征进行排序,选取排名最高的前n个特征输入径向基(rbf)网络进行分类,然后将识别错误率作为权值,与每个特征排名的乘积作为对应特征的新得分,对4组特征得分重复上述操作后,每个特征均得到4个新得分,将新得分求和作为该特征的加权得分结果,加权机制如下式所示,最后按照由小到大的顺序重新排序;
26、snew=rfsefs+rdetedet+rmiemi+rpccepcc
27、其中,snew表示某个特征的加权得分,rfs和efs分别表示费舍尔分值法(fs)模型在对应模型的评价结果中该特征的排名和识别错误率,rdet和edet分别表示距离评估技术(det)在对应模型的评价结果中该特征的排名和识别错误率,rmi和emi分别表示信息增益(mi)在对应模型的评价结果中该特征的排名和识别错误率,rpcc和epcc分别表示在对应模型的评价结果中该特征的排名和识别错误率;
28、步骤4.3:通过二分查找(bs)快速筛除排名靠后的冗余和无关特征,大致确定最优子集,然后以二分查找(bs)获得的子集为起点,分别使用序列向前查找(sfs)和序列向后查找(sbs)选择最优子集,最后比较两个子集,以其中识别准确率最高的一个为最优子集。
29、所述步骤5的具体过程为:在各个工况下分别求取正常状态与故障状态特征分量,各个特征分量在径向基网络的正确率作为固定权重,将各个特征分量融合后,取正常状态特征最大值作为减速机基于工况的动态阈值,将原始信号分成连续的小段滑动窗口,如果某小段内的信号强度超过了正常状态下的最高信号强度的110%,则认为这段信号表示存在故障。
30、所述步骤6的具体过程为:通过加速度传感器获取减速机实时加速度信号,提取最优特征分量,计算每段实际特征与最优特征之间的差值并将其归一化,计算归一化以后各特征值差值的隶属度,利用熵权法计算归一化以后各特征值差值的动态权重,设备实时状态分数=隶属度*动态权重,按照隶属度区间将减速机实际运行状态划分为健康,亚健康,故障,报废,其中健康的设备实时状态分数为1.0-0.8,亚健康的设备实时状态分数为0.8-0.6,故障的设备实时状态分数为0.6-0.4,报废的设备实时状态分数为0.4-0。
31、所述高精度加速度传感器的型号为608a11,频率范围为0.5000-10000hz。
32、基于多特征融合的减速机运行状态检测系统,包括:
33、采集信号模块:采集减速机的加速度信号、转速信号和电流信号;
34、信号处理模块:对采集到的加速度信号与转速信号进行降噪和边缘计算,得到特征数据集,所述特征数据集包括时域特征值、频域特征值和特征值域特征值;
35、传输与分类模块:将数据处理后提取的特征数据集通过无线传输到远程服务器数据库中,远程服务器数据库根据减速机型号、电流信号和转速信号对不同型号、不同工况的减速机的加速度信号进行分类;
36、最优特征子集模块:采集正常样本数据与故障样本数据,提取时域特征值、频域特征值和特征值域特征值,选择最优特征分量,使用过滤式算法对提取的特征进行排序,利用二分查找(bs)与径向基(rbf)网络大致确定最优子集,使用序列向前查找(sfs)和序列向后查找(sbs)选择最优子集,最后比较两个子集,以其中识别准确率最高的一个为信号最优特征子集;
37、阈值确定模块:根据划分的不同型号、不同工况的减速机的加速度信号分别求取正常状态与故障状态最优特征分量,确定信号故障预警阈值;
38、运行状态检测模块:根据动态阈值确定模块中初步划分的信号故障预警阈值,若超过阈值,则进行运行状态检测并划分实际运行状态;若信号强度没有超过信号故障预警阈值,则代表减速机正常运行。
39、基于多特征融合的减速机运行状态检测设备,包括:
40、存储器:用于存储所述一种基于多特征融合的减速机运行状态检测方法的计算机程序;
41、处理器:用于执行所述计算机程序时实现一种基于多特征融合的减速机运行状态检测方法。
42、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时能够实现一种基于多特征融合的减速机运行状态检测方法。
43、相对于现有技术,本发明的有益效果在于:
44、(1)相对于现有的原始加速度信号的分析,本方法不局限于时域或频域的单独分析,而是使用时域、频域和特征值域特征的多重分析,信号的特征值选取更加全面,对故障识别更加精确,所确定的阈值也越发精确。
45、(2)本发明所涉及的特征提取算法复杂度低,可在目前市场上主流的绝大部分嵌入式硬件节点中完成。
46、(3)采用高精度的传感器硬件采集加速度信号,采样率达到10khz,采集数据精确,可以覆盖减速机典型故障频率范围,减速机典型故障频率分布在1-10khz之间,现有的有线系统,会带来通信数据量大和价格昂贵的问题,无法大规模普及,而将高精度的加速度传感器集成在边缘节点硬件中,并使用边缘节点硬件中的中央处理单元进行特征提取计算,提取加速度信号的核心特征,有效降低了通信量和成本,可大规模实际应用。
47、(5)采用边缘计算的降噪算法使特征值受噪声以及其他干扰分量影响大幅减少,特征提取时间缩短的同时大幅度提高了所选特征质量。
48、(6)特征选择方法使特征个数大幅减少,分类训练的时间缩短的同时大幅度提高了准确率。
49、(7)故障预警阈值确定基于对减速机故障较为敏感的多个特征值按照不同的权重融合确定,大幅提高了故障预警阈值的准确性,同时采用滑动窗口的方式,降低了阈值的误报警率。
50、(8)减速机实时状态的检测基于故障阈值的确定,采用隶属度函数以及动态权重的方式使所得的减速机实时状态分数更加精确,有助于提高减速机使用寿命。
51、综上所述,本发明采用传感器硬件节点实现高精度加速度信号采集;在嵌入式边缘硬件上,用时域、频域和特征域的信号处理算法,压缩数据量,实现特征值提取;将核心特征数据通过无线传输到远程服务器;服务器对不同型号、不同工况减速机的加速度数据进行分类;采集正常样本数据与故障样本数据,通过特征排序,特征选择,得到最优特征分量,得到减速机故障预警阈值,接着利用故障预警阈值计算得到减速机实时运行状态,提高减速机异常检测与分析的准确率,提高减速机的使用寿命,同时大幅降低计算机每次检测的计算成本。
- 还没有人留言评论。精彩留言会获得点赞!