相机在线标定方法、装置、设备和介质与流程
本公开涉及图像处理,具体涉及自动驾驶、辅助驾驶、无人驾驶、移动机器人、智能驾驶和云计算等,特别涉及一种相机在线标定方法、装置、设备和介质。
背景技术:
1、在智能驾驶场景中,相机可以为载体提供周围环境丰富的纹理、形状和颜色等信息,是载体获取环境障碍物及标志牌等信息的一种主要方式。为了准确利用相机提供的周围环境信息,需要对相机相对于载体的姿态进行在线标定。
2、目前主流的标定方法通常需要利用特定的标定物(如棋盘格或二维码等)在特定的标定空间中才能实现。
技术实现思路
1、本公开提供了一种用于提高相机在线标定的灵活性以及实时性的相机在线标定方法、装置、设备和介质。
2、根据本公开的一方面,提供了一种相机在线标定方法,包括:
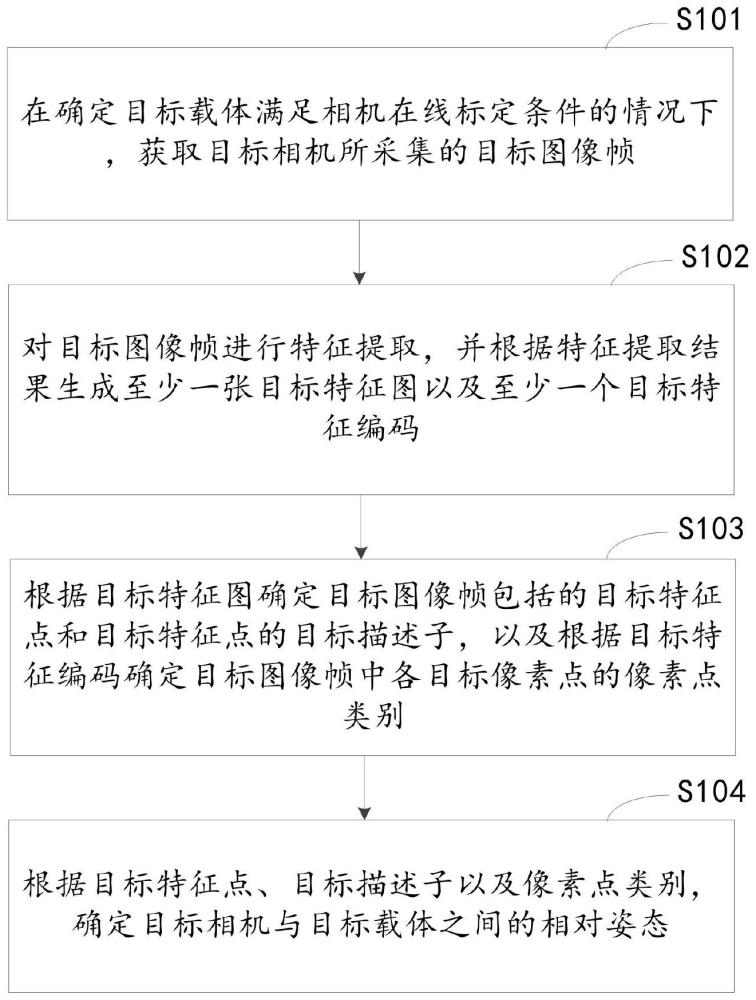
3、在确定目标载体满足相机在线标定条件的情况下,获取目标相机所采集的目标图像帧;其中,所述目标相机搭载于所述目标载体上;
4、对所述目标图像帧进行特征提取,并根据特征提取结果生成至少一张目标特征图以及至少一个目标特征编码;
5、根据所述目标特征图确定所述目标图像帧包括的目标特征点和所述目标特征点的目标描述子,以及根据所述目标特征编码确定所述目标图像帧中各目标像素点的像素点类别;其中,所述像素点类别包括静态像素点和动态像素点;
6、根据所述目标特征点、所述目标描述子以及所述像素点类别,确定所述目标相机与所述目标载体之间的相对姿态。
7、根据本公开的另一方面,提供了一种相机在线标定装置,包括:
8、目标图像帧获取模块,用于在确定目标载体满足相机在线标定条件的情况下,获取目标相机所采集的目标图像帧;其中,所述目标相机搭载于所述目标载体上;
9、特征处理模块,用于对所述目标图像帧进行特征提取,并根据特征提取结果生成至少一张目标特征图以及至少一个目标特征编码;
10、信息确定模块,用于根据所述目标特征图确定所述目标图像帧包括的目标特征点和所述目标特征点的目标描述子,以及根据所述目标特征编码确定所述目标图像帧中各目标像素点的像素点类别;其中,所述像素点类别包括静态像素点和动态像素点;
11、相机标定模块,用于根据所述目标特征点、所述目标描述子以及所述像素点类别,确定所述目标相机与所述目标载体之间的相对姿态。
12、根据本公开的另一方面,提供了一种电子设备,包括:
13、至少一个处理器;以及
14、与至少一个处理器通信连接的存储器;其中,
15、存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行本公开中任一项的方法。
16、根据本公开的另一方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,计算机指令用于使计算机执行本公开中任一项的方法。
17、根据本公开的另一方面,提供了一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行本公开中任一项的方法。
18、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种相机在线标定方法,包括:
2.根据权利要求1所述的方法,其中,所述获取目标相机所采集的目标图像帧,包括:
3.根据权利要求2所述的方法,其中,所述根据所述当前特征图确定所述当前图像帧包括的当前特征点和所述当前特征点的当前描述子,包括:
4.根据权利要求2所述的方法,其中,所述根据所述相邻特征图确定所述相邻图像帧包括的相邻特征点和所述相邻特征点的相邻描述子,包括:
5.根据权利要求3所述的方法,其中,所述在所述当前特征编码的数量至少为个的情况下,对各所述当前特征编码进行特征融合,生成当前融合特征编码,包括:
6.根据权利要求4所述的方法,其中,所述在所述相邻特征编码的数量至少为两个的情况下,对各所述相邻特征编码进行特征融合,生成相邻融合特征编码,包括:
7.根据权利要求1所述的方法,所述在确定目标载体满足相机在线标定条件的情况下,获取目标相机所采集的目标图像帧之前,还包括:
8.根据权利要求7所述的方法,其中,所述相机在线标定条件包括载体直行子条件;
9.根据权利要求7所述的方法,其中,所述相机在线标定条件包括道路平整度子条件;
10.根据权利要求7所述的方法,其中,所述相机在线标定条件包括载体速度子条件;
11.根据权利要求2所述的方法,其中,所述根据所述当前特征点、所述当前描述子、所述当前像素点类别、所述相邻特征点、所述相邻描述子和所述相邻像素点类别,确定所述目标相机与所述目标载体之间的相对姿态,包括:
12.根据权利要求11所述的方法,其中,所述根据所述当前静态描述子和所述相邻静态描述子,对所述当前静态特征点和所述相邻静态特征点进行匹配,得到至少一个静态特征点对,包括:
13.根据权利要求11所述的方法,其中,所述根据所述静态特征点对确定所述目标相机与所述目标载体之间的相对姿态,包括:
14.根据权利要求13所述的方法,其中,所述采用所述目标本质矩阵确定所述目标相机与所述目标载体之间的相对姿态,包括:
15.一种相机在线标定装置,包括:
16.根据权利要求15所述的装置,其中,所述目标图像帧获取模块,具体用于:
17.根据权利要求16所述的装置,其中,所述信息确定模块,具体还用于:
18.根据权利要求16所述的装置,其中,所述信息确定模块,具体还用于:
19.根据权利要求17所述的装置,其中,所述信息确定模块,具体还用于:
20.根据权利要求18所述的装置,其中,所述信息确定模块,具体还用于:
21.根据权利要求15所述的装置,所述装置还包括在线标定条件校验模块,具体用于:
22.根据权利要求21所述的装置,其中,所述相机在线标定条件包括载体直行子条件;
23.根据权利要求21所述的装置,其中,所述相机在线标定条件包括道路平整度子条件;
24.根据权利要求21所述的装置,其中,所述相机在线标定条件包括载体速度子条件;
25.根据权利要求16所述的装置,其中,所述相机标定模块,具体还用于:
26.根据权利要求25所述的装置,其中,所述相机标定模块,具体还用于:
27.根据权利要求25所述的装置,其中,所述相机标定模块,具体还用于:
28.根据权利要求27所述的装置,其中,所述相机标定模块,具体还用于:
29.一种电子设备,包括:
30.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-14中任一项所述的方法。
31.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-14中任一项所述的方法。
技术总结
本公开提供了一种相机在线标定方法、装置、设备和介质,涉及自动驾驶、辅助驾驶、无人驾驶、移动机器人、智能驾驶和云计算等技术领域。具体实现方案为:在确定目标载体满足相机在线标定条件的情况下,获取目标相机所采集的目标图像帧;对目标图像帧进行特征提取,并根据特征提取结果生成至少一张目标特征图以及至少一个目标特征编码;根据目标特征图确定目标图像帧包括的目标特征点和目标特征点的目标描述子,以及根据目标特征编码确定目标图像帧中各目标像素点的像素点类别;根据目标特征点、目标描述子以及像素点类别,确定目标相机与目标载体之间的相对姿态。本公开提高了相机在线标定的灵活性以及实时性。
技术研发人员:刘忠泽,程风,周珣,余东应,李政斌,万国伟,朱振广
受保护的技术使用者:北京百度网讯科技有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!