一种曲面轮廓线的确定方法及装置与流程
本发明涉及曲面轮廓线确定,特别是涉及一种曲面轮廓线的确定方法及装置。
背景技术:
1、目前有很多场合,都需要确定曲面在某一视场方向下的轮廓线,比如,在采用cad的线宽模式时,必须要先确定曲面的轮廓线才能进一步显示/隐藏线宽。但是,现在常用的曲面轮廓线的确定方法是将曲面一次直接划分为多个网格,对于每一网格,均进行轮廓点的判定和选取,以确定曲面轮廓线,如果划分得到的网格过多,则计算量大,如果划分得到的网格过少,则计算精度低。基于此,亟需一种新的曲面轮廓线的确定技术,以同时兼顾计算精度和计算效率。
技术实现思路
1、本发明的目的是提供一种曲面轮廓线的确定方法及装置,可同时兼顾计算精度和计算效率。
2、为实现上述目的,本发明提供了如下方案:
3、一种曲面轮廓线的确定方法,所述确定方法包括:
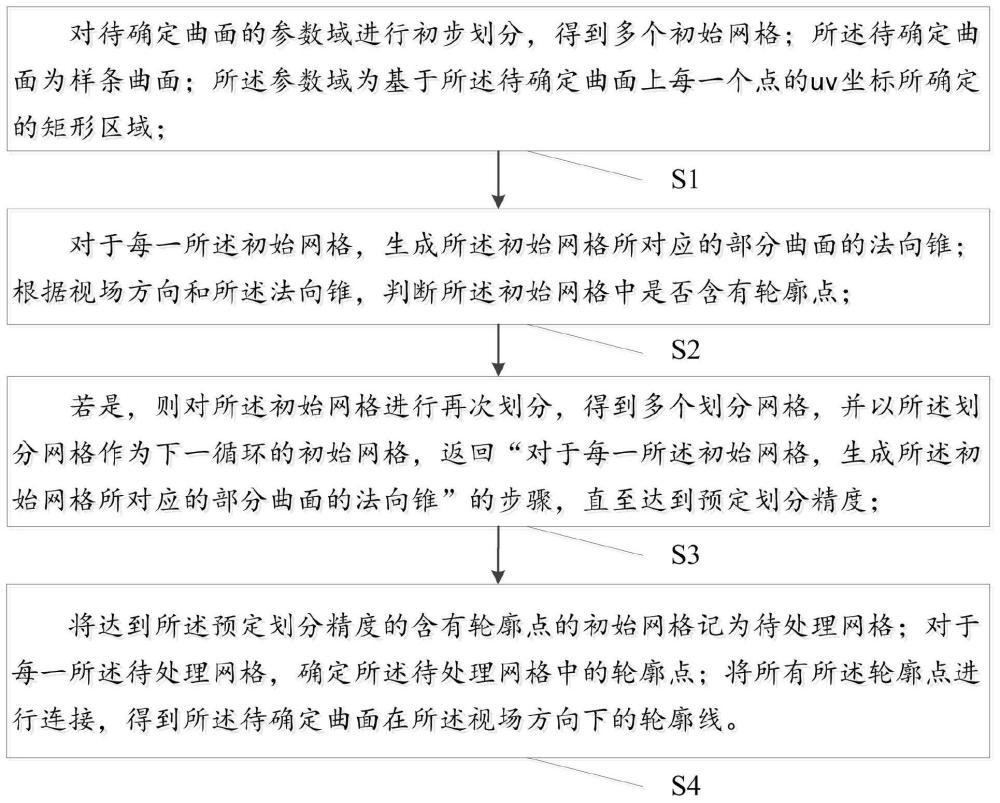
4、对待确定曲面的参数域进行初步划分,得到多个初始网格;所述待确定曲面为样条曲面;所述参数域为基于所述待确定曲面上每一个点的uv坐标所确定的矩形区域;
5、对于每一所述初始网格,生成所述初始网格所对应的部分曲面的法向锥;根据视场方向和所述法向锥,判断所述初始网格中是否含有轮廓点;
6、若是,则对所述初始网格进行再次划分,得到多个划分网格,并以所述划分网格作为下一循环的初始网格,返回“对于每一所述初始网格,生成所述初始网格所对应的部分曲面的法向锥”的步骤,直至达到预定划分精度;
7、将达到所述预定划分精度的含有轮廓点的初始网格记为待处理网格;对于每一所述待处理网格,确定所述待处理网格中的轮廓点;将所有所述轮廓点进行连接,得到所述待确定曲面在所述视场方向下的轮廓线。
8、在一些实施例中,所述生成所述初始网格所对应的部分曲面的法向锥,具体包括:
9、生成所述初始网格所对应的部分曲面的控制网格;
10、对于所述控制网格中的每一个网格,基于所述网格的相邻两条边确定一个三角面,并确定所述三角面的法向量,得到所述网格对应的4个法向量;
11、将所有所述网格对应的4个法向量的起点重合放置,生成法向锥。
12、在一些实施例中,所述根据视场方向和所述法向锥,判断所述初始网格中是否含有轮廓点,具体包括:
13、根据视场方向和所述法向锥的轴线方向确定一个划分平面;
14、对所述划分平面和所述法向锥进行求交运算,得到两条交线;
15、对于每一条所述交线,计算所述交线对应的方向向量与所述视场方向对应的方向向量的点乘,得到所述交线对应的点乘结果;
16、基于两条所述交线对应的点乘结果判断所述初始网格中是否含有轮廓点。
17、在一些实施例中,所述基于两条所述交线对应的点乘结果判断所述初始网格中是否含有轮廓点,具体包括:
18、计算两条所述交线对应的点乘结果的第一乘积,若所述第一乘积小于0,则所述初始网格中含有轮廓点,若所述第一乘积大于或者等于0,则所述初始网格中不含有轮廓点,以判断所述初始网格中是否含有轮廓点。
19、在一些实施例中,所述确定所述待处理网格中的轮廓点,具体包括:
20、对于所述待处理网格的每一条边,计算所述边的两个顶点中每一所述顶点的法向量;计算所述顶点的法向量与所述视场方向对应的方向向量的点乘,得到所述顶点对应的点乘结果;基于两个所述顶点对应的点乘结果判断所述边是否含有轮廓点;若所述边含有轮廓点,则以两个所述顶点对应的点乘结果为输入,利用线性插值的方法确定所述边上点乘结果为0的点,所述点乘结果为0的点即为所述边的轮廓点;所有所述边的轮廓点构成所述待处理网格中的轮廓点,以确定所述待处理网格中的轮廓点。
21、在一些实施例中,所述基于两个所述顶点对应的点乘结果判断所述边是否含有轮廓点,具体包括:
22、计算两个所述顶点对应的点乘结果的第二乘积,若所述第二乘积小于0,则所述边含有轮廓点,若所述第二乘积大于或者等于0,则所述边不含有轮廓点,以判断所述边是否含有轮廓点。
23、在一些实施例中,若所述待确定曲面部分被遮挡,则所述确定方法还包括:基于所述待确定曲面在所述视场方向下的轮廓线确定所述待确定曲面中未被遮挡的部分曲面的轮廓线,具体包括:
24、对所述待确定曲面在所述视场方向下的轮廓线和所述待确定曲面中未被遮挡的部分曲面的部分参数域的边界进行求交运算,得到若干个交点;
25、基于所述交点将所述轮廓线划分为多条线段;
26、对于每一条所述线段,利用射线法确定所述线段是否在所述部分参数域内;在所述部分参数域内的线段即为所述待确定曲面中未被遮挡的部分曲面的轮廓线。
27、在一些实施例中,所述利用射线法确定所述线段是否在所述部分参数域内,具体包括:
28、在所述线段上任意取一个点,将所述点沿任意方向作射线;
29、确定所述射线与所述部分参数域的交点的个数,若所述个数为偶数,则所述线段位于所述部分参数域外,若所述个数为奇数,则所述线段位于所述部分参数域内,以确定所述线段是否在所述部分参数域内。
30、在一些实施例中,在确定所述射线与所述部分参数域的交点的个数之前,所述确定方法还包括:
31、判断所述射线是否穿过所述部分参数域的顶点;若是,则将所述点沿另一方向作射线。
32、一种曲面轮廓线的确定装置,所述确定装置包括:
33、初始划分模块,用于对待确定曲面的参数域进行初步划分,得到多个初始网格;所述待确定曲面为样条曲面;所述参数域为基于所述待确定曲面上每一个点的uv坐标所确定的矩形区域;
34、再次划分模块,用于对于每一所述初始网格,生成所述初始网格所对应的部分曲面的法向锥;根据视场方向和所述法向锥,判断所述初始网格中是否含有轮廓点;若是,则对所述初始网格进行再次划分,得到多个划分网格,并以所述划分网格作为下一循环的初始网格,返回“对于每一所述初始网格,生成所述初始网格所对应的部分曲面的法向锥”的步骤,直至达到预定划分精度;
35、轮廓线生成模块,用于将达到所述预定划分精度的含有轮廓点的初始网格记为待处理网格;对于每一所述待处理网格,确定所述待处理网格中的轮廓点;将所有所述轮廓点进行连接,得到所述待确定曲面在所述视场方向下的轮廓线。
36、根据本发明提供的具体实施例,本发明公开了以下技术效果:
37、本发明用于提供一种曲面轮廓线的确定方法及装置,先对待确定曲面的参数域进行初步划分,得到多个初始网格,再生成初始网格所对应的部分曲面的法向锥,根据视场方向和法向锥,判断初始网格中是否含有轮廓点,如果是,则对初始网格进行再次划分,直至达到预定划分精度。然后确定达到预定划分精度的含有轮廓点的待处理网格中的轮廓点,并将所有轮廓点进行连接,得到待确定曲面在视场方向下的轮廓线。本发明基于法向锥判断是否含有轮廓点,并只对含有轮廓点的网格进行再次划分,相较于现有技术对曲面进行一次直接划分,并对划分得到的每一网格均进行轮廓点的判定和选取的方式,能够在计算精度相同的条件下,显著减少计算量,提高计算效率,在计算量相同的条件下,显著提高计算精度,从而达到兼顾计算精度和计算效率的目的。
- 还没有人留言评论。精彩留言会获得点赞!