低空无人机监管系统及其方法
本申请涉及智能监管领域,且更为具体地,涉及一种低空无人机监管系统及其方法。
背景技术:
1、低空无人机也称为无人航空器或遥控驾驶航空器,是一种由无线电遥控设备控制,或由预编程序操纵的非载人飞行器。在低空无人机进行作业时,无人机在低空飞行时可能与其他飞行器、建筑物、人员或交通工具发生碰撞,造成人员伤亡和财产损失,也可能会在飞行过程中发生一些故障,导致无人机时空或坠毁,可能会砸伤人。无人机的飞行活动还可能还会导致空域混乱,干扰其他航空器的正常飞行。
2、但由于现有技术中无人机监管通常依赖于人工操作或间歇性的监测,无法提供对大规模无人机活动的实时监控。这可能导致监管盲区,无法及时发现无人机的异常行为或事故。另外,传统监管通常局限于特定区域,例如机场周边或特定活动场所而在其他地区,特别是在城市郊区或农村地区,监管能力可能不足。其次,监管通常需要人工干预,包括发现异常情况、报警、并等待应急人员到达现场。这可能导致反应速度较慢,无法及时采取措施应对潜在的风险。
3、因此,期待一种优化的低空无人机监管方案。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种低空无人机监管系统及其方法,其采用基于深度神经网络模型的人工智能技术,获取预定时间段的低空无人机的飞行视频,提取关键帧后通过使用多分支感知域模块从多个角度获取飞行状态信息,计算差分后通过使用残差双注意力机制模型提取并强化飞行状态中的关键信息,以得到用于表示无人机是否发生故障的分类结果。进而,可以实现自动化的无人机监管系统,降低人工监管成本,提高监管效果和准确性。
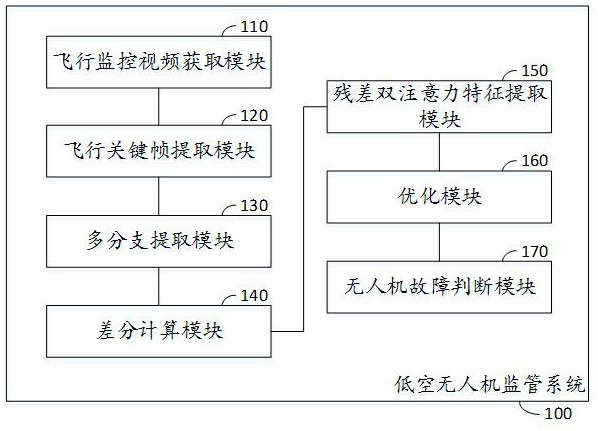
2、根据本申请的一个方面,提供了一种低空无人机监管系统,其包括:
3、飞行监控视频获取模块,用于获取预定时间段的低空无人机的飞行视频;
4、飞行关键帧提取模块,用于从所述预定时间段的低空无人机的飞行视频中提取多个飞行监控关键帧;
5、多分支提取模块,用于将所述多个飞行监控关键帧通过多分支感知域模块以得到多个飞行状态特征图;
6、差分计算模块,用于计算所述多个飞行状态特征图之间相邻两个时间点的差分以得到多个飞行状态差分特征图;
7、残差双注意力特征提取模块,用于将所述多个飞行状态差分特征图通过残差双注意力机制模型以得到分类特征图;
8、优化模块,用于提取所述分类特征图的相对于目标分类函数的运动分布模型的隐特征表达以得到优化分类特征图;
9、无人机故障判断模块,用于将所述优化分类特征图通过分类器以得到分类结果,所述分类结果用于表示无人机是否发生故障。
10、在上述低空无人机监管系统中,所述飞行关键帧提取模块,用于:以预定采样频率从所述预定时间段的低空无人机的飞行视频中提取多个飞行监控关键帧。
11、在上述低空无人机监管系统中,所述多分支提取模块,包括:第一点卷积单元,用于将所述飞行监控关键帧输入所述多分支感知域模块的第一点卷积层以得到卷积特征图;多分支感知单元,用于分别将所述卷积特征图通过所述多分支感知域模块的第一分支感知域单元、第二分支感知域单元和第三分支感知域单元以得到第一分支感知特征图、第二分支感知特征图和第三分支感知特征图,其中,所述第一分支感知域单元、所述第二分支感知域单元和所述第三分支感知域单元具有并行结构;融合单元,用于将所述第一分支感知特征图、所述第二分支感知特征图和所述第二分支感知特征图进行级联以得到融合感知特征图;第二点卷积单元,用于将所述融合感知特征图输入所述多分支感知域模块的第二点卷积层以得到通道校正融合感知特征图;以及,残差级联单元,用于计算所述通道校正融合感知特征图和所述卷积特征图的按位置点加以得到所述飞行状态特征图。
12、在上述低空无人机监管系统中,所述残差双注意力特征提取模块,包括:空间特征提取单元,用于将所述飞行状态差分特征图通过所述残差双注意力机制模型的空间注意力模块以得到空间注意力图;通道特征提取单元,用于将所述飞行状态差分特征图通过所述残差双注意力机制模型的通道注意力模块以得到通道注意力图;融合单元,用于融合所述空间注意力图和所述通道注意力图以得到加权特征图;加权单元,用于融合所述飞行状态差分特征图和所述加权特征图以得到所述增强飞行状态差分特征图;以及,级联单元,用于将所述多个增强飞行状态差分特征图进行级联以得到所述分类特征图。
13、在上述低空无人机监管系统中,所述通道特征提取单元,用于:对所述飞行状态差分特征图的沿通道维度的各个特征矩阵进行全局均值池化以得到通道特征向量;将所述通道特征向量通过softmax函数以得到归一化通道特征向量;以及,以所述归一化通道特征向量中各个位置的特征值作为权重对所述飞行状态差分特征图的沿通道维度的特征矩阵进行加权以得到通道注意力图。
14、在上述低空无人机监管系统中,所述无人机故障判断模块,包括:展开单元,用于将所述优化分类特征图展开为分类特征向量;全连接编码单元,用于使用所述分类器的全连接层对所述分类特征向量进行全连接编码以得到编码分类特征向量;以及,分类结果单元,用于将所述编码分类特征向量通过所述分类器的softmax分类函数以得到所述分类结果。
15、根据本申请的另一方面,提供了一种低空无人机监管方法,其包括:
16、获取预定时间段的低空无人机的飞行视频;
17、从所述预定时间段的低空无人机的飞行视频中提取多个飞行监控关键帧;
18、将所述多个飞行监控关键帧通过多分支感知域模块以得到多个飞行状态特征图;
19、计算所述多个飞行状态特征图之间相邻两个时间点的差分以得到多个飞行状态差分特征图;
20、将所述多个飞行状态差分特征图通过残差双注意力机制模型以得到分类特征图;
21、提取所述分类特征图的相对于目标分类函数的运动分布模型的隐特征表达以得到优化分类特征图;
22、将所述优化分类特征图通过分类器以得到分类结果,所述分类结果用于表示无人机是否发生故障。
23、与现有技术相比,本申请提供的一种低空无人机监管系统及其方法,其采用基于深度神经网络模型的人工智能技术,获取预定时间段的低空无人机的飞行视频,提取关键帧后通过使用多分支感知域模块从多个角度获取飞行状态信息,计算差分后通过使用残差双注意力机制模型提取并强化飞行状态中的关键信息,以得到用于表示无人机是否发生故障的分类结果。进而,可以实现自动化的无人机监管系统,降低人工监管成本,提高监管效果和准确性。
技术特征:
1.一种低空无人机监管系统,其特征在于,包括:
2.根据权利要求1所述的低空无人机监管系统,其特征在于,所述飞行关键帧提取模块,用于:
3.根据权利要求2所述的低空无人机监管系统,其特征在于,所述多分支提取模块,包括:
4.根据权利要求3所述的低空无人机监管系统,其特征在于,所述残差双注意力特征提取模块,包括:
5.根据权利要求4所述的低空无人机监管系统,其特征在于,所述通道特征提取单元,用于:
6.根据权利要求5所述的低空无人机监管系统,其特征在于,所述优化模块,用于:
7.根据权利要求6所述的低空无人机监管系统,其特征在于,所述无人机故障判断模块,包括:
8.一种低空无人机监管方法,其特征在于,包括:
9.根据权利要求8所述的低空无人机监管方法,其特征在于,从所述预定时间段的低空无人机的飞行视频中提取多个飞行监控关键帧,包括:
10.根据权利要求9所述的低空无人机监管方法,其特征在于,将所述多个飞行监控关键帧通过多分支感知域模块以得到多个飞行状态特征图,包括:
技术总结
本申请涉及智能监管领域,其具体地公开了一种低空无人机监管系统及其方法,其采用基于深度神经网络模型的人工智能技术,获取预定时间段的低空无人机的飞行视频,提取关键帧后通过使用多分支感知域模块从多个角度获取飞行状态信息,计算差分后通过使用残差双注意力机制模型提取并强化飞行状态中的关键信息,以得到用于表示无人机是否发生故障的分类结果。进而,可以实现自动化的无人机监管系统,降低人工监管成本,提高监管效果和准确性。
技术研发人员:黄煜栋,陈彦佐
受保护的技术使用者:杭州科技职业技术学院
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!