一种磁悬浮转子不对中振动的谐波抑制方法及系统
本技术涉及磁悬浮轴承的振动控制,特别涉及一种磁悬浮转子不对中振动的谐波抑制方法及系统。
背景技术:
1、据统计,旋转机械中大约70%以上的故障来源于转子不对中。由于转子不可避免存在加工误差和装配误差的问题,包括磁悬浮转子间静态偏心质量激励的影响,所以会使转子产生较大的动态偏心以及磁悬浮轴承之间产生一定的不对中量,势必会导致转子不对中振动现象的发生。
2、经前期检测发现,转子存在不对中时,导致系统振动最明显的谐波成分主要为转子转速的2倍频谐波分量。在实际应用中,这种谐波干扰会极大的影响工作效率和设备的稳定性,严重时甚至诱发安全事故。因此,由磁悬浮转子不对中引发的谐波振动是丞待解决的重要问题。
3、根据不同的控制策略,磁悬浮轴承的振动控制主要从两方面展开研究:零位移控制和零电流控制。零位移控制就是通过控制算法转化成补偿电流,进入磁悬浮轴承后产生相应的控制力来抵消不对中激振力的影响,使转子强行围绕惯性主轴旋转,从而减小转子的振动位移。零电流控制也被称为零轴承力控制,就是通过合适的滤波算法将反馈信号里的不对中量滤除,消除或减小控制电流中不对中力的同频量,最终使转子始终不偏离预设轨迹转动,从而达到自动平衡作用目的。上述两类控制方法实现的途径和目的不尽相同。
技术实现思路
1、本技术提供了一种磁悬浮转子不对中振动的谐波抑制方法及系统,其优点是基于零电流控制原理对磁悬浮转子不对中振动产生的转速高频和2倍频谐波干扰进行分频次、分阶段抑制,按照先高频后低频的滤波顺序,从而大大降低由转子不对中振动产生的谐波成分对磁悬浮系统造成的不利影响,最终实现转子的稳定悬浮旋转。
2、本技术的技术方案如下:
3、一方面,本技术提供一种磁悬浮转子不对中振动的谐波抑制方法,包括以下步骤:
4、采集由磁悬浮转子不对中引起的转子径向振动信号;
5、通过频率自适应作用对转子径向振动信号中存在的高频谐波成分进行滤波,并构造一对正交信号即正负序分量,输出含有转速2倍频谐波的转子径向振动信号;
6、将含有转速2倍频谐波的转子径向振动信号进行park变换,将转子径向振动信号由αβ静止坐标系中转换到dq旋转坐标系下,输出含有转速2倍频谐波的转子径向振动信号直流量;
7、将含有转速2倍频谐波的转子径向振动信号直流量进行延时信号消除dsc滤波,对转子径向振动信号中的转速2倍频谐波进行滤除;
8、将不含转速2倍频谐波的转子径向振动信号进行park反变换,输出不包含转速2倍频谐波干扰的转子径向振动信号并反馈至磁轴承闭环系统中。
9、进一步的,对转子不对中径向振动力中存在的高频谐波成分进行滤波步骤中,两相传递函数表达式为:
10、
11、其中,ω′为输入信号的频率估计值,d(s)为中心频率是ω′的带通滤波器,q(s)为中心频率是ω′的低通滤波器,s为拉普拉斯算子,k为滤波带宽调节系数;
12、对转子不对中振动信号v=vsin(ωt+δ),两相输出表示为:
13、
14、
15、其中,vα、ψα和vβ、ψβ分别表示d(s)和q(s)输出响应的幅值和相位。
16、进一步的,所述park变换的数值运算表达式为:
17、
18、其中,iα、iβ和id、iq分别为三相交流信号转化为两相直流信号按其空间角度的合成矢量在αβ坐标系和dq坐标系下的投影,θ为αβ坐标系和dq坐标系之间的角度差。
19、进一步的,dq坐标系下延时信号消除dsc滤波步骤中单个dsc环节在s域的传递函数表达式为:
20、
21、其中,t为转子不对中径向振动信号的基波周期,n为谐波次数,s为拉普拉斯算子。
22、进一步的,对转速2倍频谐波进行滤除时的整个dqdsc环节滤波的一阶传递函数表达式为:
23、
24、其中,根据需要滤除谐波的次数来设定td的值,s为拉普拉斯算子,可见dsc算子能够滤除频率为的谐波,i=0,±1,±2,…。
25、进一步的,所述park反变换步骤的数值运算表达式为:
26、
27、其中,iα、iβ和id、iq分别为三相交流信号转化为两相直流信号按其空间角度的合成矢量在αβ坐标系和dq坐标系下的投影,θ为αβ坐标系和dq坐标系之间的角度差。
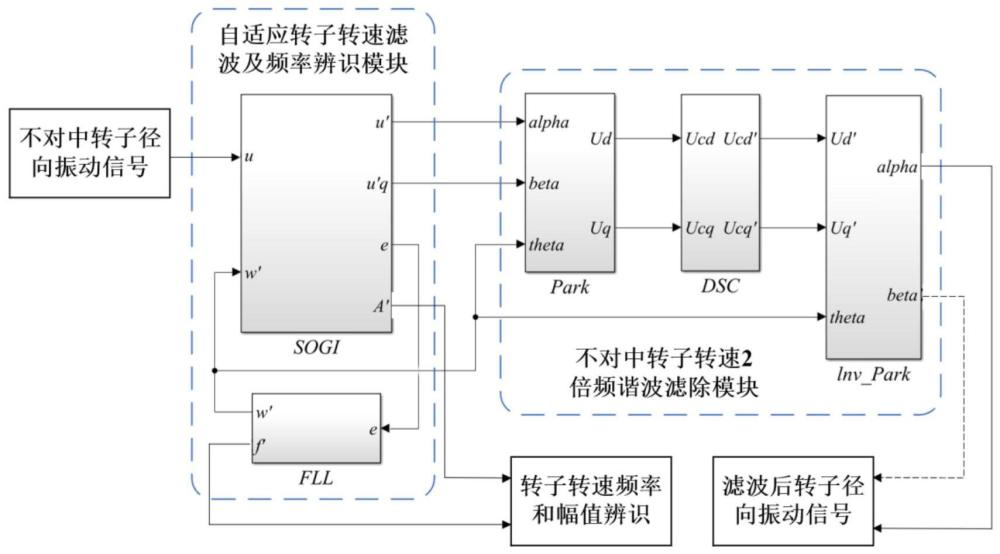
28、另一方面,本技术提供一种磁悬浮转子不对中振动的谐波抑制系统,包括二阶广义积分锁频环自适应滤波辨识模块sogi-fll、park变换模块、延时信号消除dsc滤波模块和park反变换模块,所述二阶广义积分锁频环自适应滤波辨识模块sogi-fll包括sogi滤波模块和fll频率辨识模块;
29、所述sogi滤波模块的输出端与所述park变换模块的三相交流输入端相连,所述sogi滤波模块的误差输出端e与所述fll频率辨识模块相连,所述fll频率辨识模块的弧度制频率ω′输出端分别与所述sogi滤波模块、所述park变换模块和所述park反变换模块相连,构成不对中转子转速同频量实时自适应辨识;所述延时信号消除dsc滤波模块的输入端与所述park变换模块的输出端相连;所述park反变换模块的两相直流输入端与所述延时信号消除dsc滤波模块的输出端相连。
30、进一步的,所述二阶广义积分锁频环自适应滤波辨识模块sogi-fll两相输出的传递函数表达式为:
31、
32、其中,ω′为输入信号的频率估计值,d(s)为中心频率是ω′的带通滤波器,q(s)为中心频率是ω′的低通滤波器,s为拉普拉斯算子,k为滤波带宽调节系数;
33、对转子不对中振动信号v=vsin(ωt+δ),两相输出表示为:
34、
35、
36、其中,vα、ψα和vβ、ψβ分别表示d(s)和q(s)输出响应的幅值和相位。
37、进一步的,所述park变换模块的数值运算表达式为:
38、
39、其中,iα、iβ和id、iq分别为三相交流信号转化为两相直流信号按其空间角度的合成矢量在αβ坐标系和dq坐标系下的投影,θ为αβ坐标系和dq坐标系之间的角度差;
40、dq坐标系下所述延时信号消除dsc滤波模块中单个dsc环节在s域的传递函数表达式为:
41、
42、其中,t为转子不对中径向振动信号的基波周期,n为谐波次数,s为拉普拉斯算子;
43、所述延时信号消除dsc滤波模块对转速2倍频谐波进行滤除时的整个dqdsc环节滤波的一阶传递函数表达式为:
44、
45、其中,根据需要滤除谐波的次数来设定td的值,s为拉普拉斯算子,可见dsc算子能够滤除频率为的谐波,i=0,±1,±2,…;
46、所述park反变换模块的数值运算表达式为:
47、
48、其中,iα、iβ和id、iq分别为三相交流信号转化为两相直流信号按其空间角度的合成矢量在αβ坐标系和dq坐标系下的投影,θ为αβ坐标系和dq坐标系之间的角度差。
49、综上所述,本技术的有益效果有:
50、1.本发明基于零电流控制原理对磁悬浮转子不对中振动产生的谐波干扰进行分频次、分阶段抑制,按照先高频后低频的滤波顺序,从而大大降低由转子不对中振动产生的谐波成分对磁悬浮系统造成的不利影响,最终实现转子的稳定悬浮旋转;
51、2.本发明的磁悬浮转子不对中振动的谐波抑制方法可通过matlab/simulink软件搭建算法后直接写入半实物仿真控制器中,即可实施对磁悬浮系统的实时在线控制,操作便捷,算法简单且兼容性强;
52、3.本发明利用各算法模块的有益特点,尤其在sogi滤波模块中引入fll频率辨识模块,增强了磁悬浮谐波抑制系统在滤波和控制时的准确性。通过park变换将交流信号转换成直流量后,延时信号消除dsc滤波模块能够在滤波效果较好的同时避免了直接采用低通滤波器带来的动态响应差的问题。
- 还没有人留言评论。精彩留言会获得点赞!