一种集气站智能巡检方法、装置、设备及存储介质与流程
本技术涉及智能巡检,具体涉及一种集气站智能巡检方法、装置、设备及存储介质。
背景技术:
1、在石油和天然气行业,集气站是一个至关重要的设施,负责收集、处理和储存来自多个气井的天然气。为了确保集气站的正常运行和安全,需要定期对集气站内的各种设备进行巡检。
2、随着科技进步,采用机器人代替人力进行集气站巡检维护已经逐渐成为行业发展方向。机器人可以在预设路线上移动巡视设施,并将巡检结果发送给远程控制中心。但这类巡检机器人的路线都是人工预先设置好的,无法根据实际情况智能规划路线,巡检路线不灵活。
技术实现思路
1、本技术提供一种集气站智能巡检方法、装置、设备及存储介质,用于根据实际情况进行智能规划路线,巡检路线灵活多变。
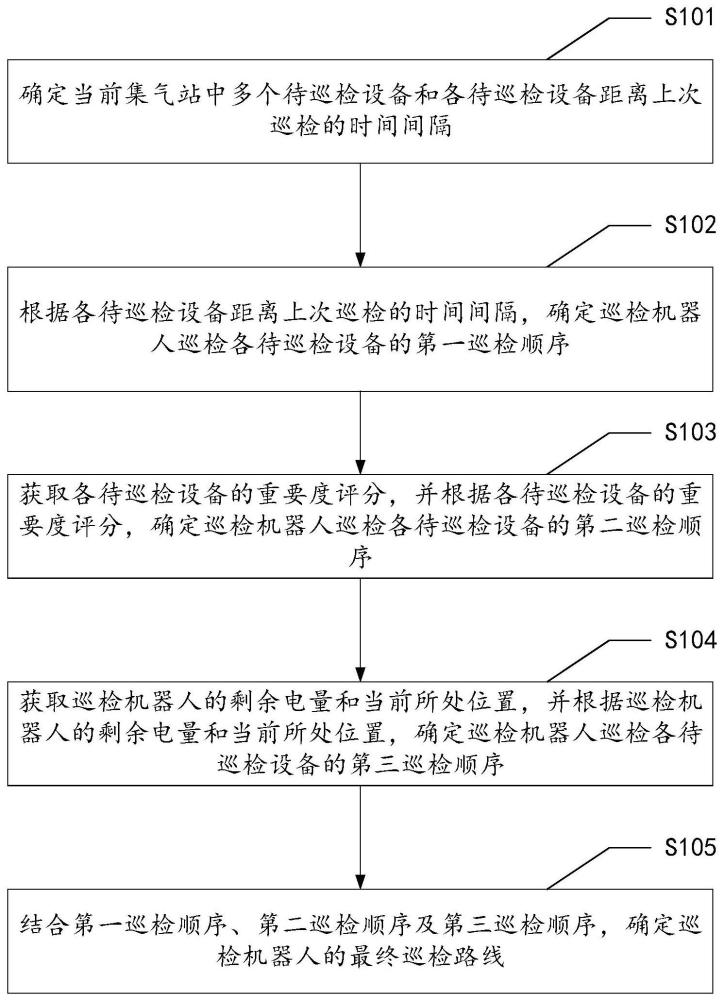
2、第一方面,本技术提供了一种集气站智能巡检方法,所述方法包括:确定当前集气站中多个待巡检设备和各所述待巡检设备距离上次巡检的时间间隔;根据各所述待巡检设备距离上次巡检的时间间隔,确定巡检机器人巡检各所述待巡检设备的第一巡检顺序;获取各所述待巡检设备的重要度评分,并根据各所述待巡检设备的重要度评分,确定所述巡检机器人巡检各所述待巡检设备的第二巡检顺序;获取所述巡检机器人的剩余电量和当前所处位置,并根据所述巡检机器人的剩余电量和当前所处位置,确定所述巡检机器人巡检各所述待巡检设备的第三巡检顺序;结合所述第一巡检顺序、所述第二巡检顺序及所述第三巡检顺序,确定所述巡检机器人的最终巡检路线。
3、通过采用上述技术方案,首先,考虑了设备客观状态,时间间隔可以评估故障风险,重要度评分可以评估设备对系统影响程度。这些指标的综合应用可以对设备进行全面评估,实现更智能化的巡检顺序规划,有效解决预设路线不灵活的问题。其次,方法还结合了机器人的电量和位置信息,可以规划出更经济有效的路线,避免了电量耗尽等风险,提高了巡检效率。最后,根据设备的实时反馈状态动态调整路线,动态调整实现了闭环控制,保证了巡检的实效性。综上,该方法实现了智能规划和动态调整相结合的最优巡检路线,相比预设路线提高了巡检质量和效率,对增强集气站安全运行具有重要意义。
4、可选的,所述根据各所述待巡检设备距离上次巡检的时间间隔,确定巡检机器人巡检各所述待巡检设备的第一巡检顺序,包括:获取所述待巡检设备的预设巡检间隔;计算各所述待巡检设备的所述预设巡检间隔和距离上次巡检的时间间隔的差值;根据所述差值大小,确定巡检机器人巡检各所述待巡检设备的第一巡检顺序,其中,所述差值大的待巡检设备的巡检优先级高于所述差值小的待巡检设备。
5、通过采用上述技术方案,获取了设备的预设巡检间隔,这是每个设备的标准巡检周期,可以根据设备属性配置。然后计算实际间隔与标准间隔差值,差值直接反映设备巡检的紧迫程度。根据差值高低确定巡检顺序,差值大意味着设备长时间未被巡检,故障风险更高,应该优先巡检。实现了按设备客观状态确定优先级,有效解决预设路线不合理的问题。基于设备时间间隔智能确定巡检顺序的技术手段,可以充分利用设备自身状态信息进行合理规划,使有限资源更集中地检查故障风险更高的设备,对保证集气站安全运行具有重要意义。
6、可选的,所述根据各所述待巡检设备的重要度评分,确定所述巡检机器人巡检各所述待巡检设备的第二巡检顺序,包括:获取各所述待巡检设备的历史故障次数,根据所述历史故障次数,确定各所述待巡检设备的故障率评分;获取工作人员根据各所述待巡检设备的重要程度对各所述待巡检设备预先设定的评分,得到各所述待巡检设备的关键性评分;结合所述关键性评分和所述故障率评分,得到各所述待巡检设备的重要度评分;根据所述重要度评分,确定所述巡检机器人巡检各所述待巡检设备的第二巡检顺序。
7、通过采用上述技术方案,获取每个设备的历史故障统计数据,计算出故障率评分,直接反映故障发生概率,还获取关键性评分,反映设备对系统的重要程度。通过算法计算出综合两个评分的重要度评分,可以对设备重要性进行全面评判,重要设备的评分更高。最后按重要度评分高低确定第二巡检顺序,重要设备排前面。基于设备属性智能规划顺序的技术手段,可以驱动有限资源更集中地巡检对系统影响大的重要设备,对提高巡检效率和质量具有重要意义。
8、可选的,所述根据所述重要度评分,确定所述巡检机器人巡检各所述待巡检设备的第二巡检顺序,包括:获取各所述巡检机器人的所述关键性评分对应的第一权重参数,及所述故障率评分对应的第二权重参数;将所述关键性评分与所述第一权重参数进行算术相乘,得到第一分数,将所述故障率评分与所述第二权重参数进行算术相乘,得到第二分数;结合所述第一分数和所述第二分数,得到各所述巡检机器人的所述重要度评分;根据所述重要度评分,确定各所述巡检机器人巡检各所述待巡检设备的第二巡检顺序,其中,所述重要度评分大的待巡检设备的巡检优先级高于所述重要度评分小的待巡检设备的巡检优先级。
9、通过采用上述技术方案,设置两个评分指标的权重参数,可以区分两者不同程度的重要性,赋予不同权值。采用了加权算法,即将评分与对应的权重相乘,可以使评分体现权重差异,实现精确的重要性计算。还根据加权综合评分结果动态确定巡检顺序,重要设备得分高,对应的优先级高。这种运用加权法的技术手段,使评估更加全面和精确,规划结果更加合理。
10、可选的,所述结合所述第一巡检顺序、所述第二巡检顺序及所述第三巡检顺序,确定所述巡检机器人的最终巡检路线,包括:根据所述第一巡检顺序,确定各所述待巡检设备对应的第一顺序评分;根据所述第二巡检顺序,确定各所述待巡检设备对应的第二顺序评分;根据所述第三巡检顺序,确定各所述待巡检设备对应的第三顺序评分;分配所述第一巡检顺序为第一权重占比、所述第二巡检顺序为第二权重占比及所述第三巡检顺序为第三权重占比;将所述第一顺序评分与所述第一权重占比进行算术相乘,得到各所述待巡检设备对应的第一评分;将所述第二顺序评分与所述第二权重占比进行算术相乘,得到各所述待巡检设备对应的第二评分;将所述第三顺序评分与所述第三权重占比进行算术相乘,得到各所述待巡检设备对应的第三评分;将各所述待巡检设备对应的所述第一评分、所述第二评分及所述第三评分进行算术相加,得到各所述待巡检设备的最终评分;根据各所述待巡检设备的最终评分,确定所述巡检机器人的最终巡检路线。
11、通过采用上述技术方案,为三个巡检顺序配置了不同的权重占比,反映它们在最终路线选择上的重要性。其次,按顺序为每个设备计算权重评分,并将三个顺序的权重评分累加求和,得到设备的最终综合评分。最后根据最终评分高低动态确定最终路线,使路线综合平衡了三个顺序的优化考量。这种多阶段加权算法的技术手段,可以实现不同因素的平衡与优化,使最终路线更加合理化。
12、可选的,所述结合所述第一巡检顺序、所述第二巡检顺序及所述第三巡检顺序,确定所述巡检机器人的最终巡检路线之后,还包括:若所述巡检机器人按照所述最终巡检路线巡检时,监测到至少一个所述待巡检设备存在异常状态,则根据存在异常状态的待巡检设备所处的位置调整所述最终巡检路线。
13、通过采用上述技术方案,机器人在执行巡检任务时,,可以实时监测设备参数,检测是否存在异常,一旦检测到设备异常,会自动判定该设备优先级最高,需要提前检查。然后快速重新规划路线,实现了对设备状态变化的主动控制,使巡检更加智能化和灵活。
14、可选的,所述结合所述第一巡检顺序、所述第二巡检顺序及所述第三巡检顺序,确定所述巡检机器人的最终巡检路线之后,还包括:获取各所述待检测设备的检测数据;判断各所述待检测设备的检测数据是否符合预设要求,若不符合,则发送报警信息至维修人员的终端设备,以使所述维修人员对异常设备进行维修。
15、通过采用上述技术方案,机器人收集每个设备的检测数据,提取各项运行参数,通过判断参数是否符合预设的正常范围,可以快速检测出设备异常。一旦判断出异常,会立即自动发送报警信息给维修人员,使后者可以及时前往处理。实现了对设备状态的主动监测,并可以迅速响应故障隐患,大大缩短了响应时间,避免了严重事故的发生。
16、第二方面,本技术提供一种集气站智能巡检装置,所述装置包括:确定模块、第一制定模块、第二制定模块、第三制定模块及结合模块;其中,所述确定模块,用于确定当前集气站中多个待巡检设备和各所述待巡检设备距离上次巡检的时间间隔;所述第一制定模块,用于根据各所述待巡检设备距离上次巡检的时间间隔,确定巡检机器人巡检各所述待巡检设备的第一巡检顺序;所述第二制定模块,用于获取各所述待巡检设备的重要度评分,并根据各所述待巡检设备的重要度评分,确定所述巡检机器人巡检各所述待巡检设备的第二巡检顺序;所述第三制定模块,用于获取所述巡检机器人的剩余电量和当前所处位置,并根据所述巡检机器人的剩余电量和当前所处位置,确定所述巡检机器人巡检各所述待巡检设备的第三巡检顺序;所述结合模块,用于结合所述第一巡检顺序、所述第二巡检顺序及所述第三巡检顺序,确定所述巡检机器人的最终巡检路线。
17、通过采用上述技术方案,首先,考虑了设备客观状态,时间间隔可以评估故障风险,重要度评分可以评估设备对系统影响程度。这些指标的综合应用可以对设备进行全面评估,实现更智能化的巡检顺序规划,有效解决预设路线不灵活的问题。其次,方法还结合了机器人的电量和位置信息,可以规划出更经济有效的路线,避免了电量耗尽等风险,提高了巡检效率。最后,根据设备的实时反馈状态动态调整路线,动态调整实现了闭环控制,保证了巡检的实效性。综上,该方法实现了智能规划和动态调整相结合的最优巡检路线,相比预设路线提高了巡检质量和效率,对增强集气站安全运行具有重要意义。
18、第三方面,本技术提供一种电子设备,采用如下技术方案:包括处理器、存储器、用户接口及网络接口,所述存储器用于存储指令,所述用户接口和网络接口用于给其他设备通信,所述处理器用于执行所述存储器中存储的指令,以使所述电子设备执行如上述任一种集气站智能巡检方法的计算机程序。
19、第四方面,本技术提供一种计算机可读存储介质,采用如下技术方案:存储有能够被处理器加载并执行上述任一种集气站智能巡检方法的计算机程序。
20、综上所述,本技术包括以下至少一种有益技术效果:
21、1.该方法实现了智能规划和动态调整相结合的最优巡检路线,相比预设路线提高了巡检质量和效率,对增强集气站安全运行具有重要意义;
22、2.可以实现不同因素的平衡与优化,使最终路线更加合理化。
- 还没有人留言评论。精彩留言会获得点赞!