基于大数据分析的田地路线识别系统的制作方法
本发明属于计算机视觉,具体是基于大数据分析的田地路线识别系统。
背景技术:
1、田地路线识别系统是一种用图像采集设备获取田地的图像数据,然后通过数据处理和分析,自动识别和提取田地中的路线信息的系统,旨在帮助规划田地的使用和资源配置,最大限度的提高农作物的产量和质量,同时帮助农业从业者更好的保护环境和进行可持续农业经营。但是现有的田地路线识别技术存在准确的路线识别需要大规模的标注数据集,但是标注田地图像数据耗时且人力成本高,难以应对数据集的更新与变化的技术问题;存在路线识别结果无法及时获得,导致田地管理决策延迟,影响农作物的种植和生长的技术问题;存在田地环境受多种因素影响,导致图像质量下降,干扰路线识别的准确性,非路线数据错误识别为路线,影响田地的正常运营的技术问题;存在田地路线识别可视化不准确,导致无法直观看出田地的路线分布、形状和连接关系,限制对农田管理和作物种植的深入研究和决策支持的技术问题。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供的基于大数据分析的田地路线识别系统,针对存在准确的路线识别需要大规模的标注数据集,但是标注田地图像数据耗时且人力成本高的技术问题,采用半监督数据标注算法,通过数据点之间的相似性进行标签传播,标签经过节点之间的边传递给相邻节点进行数据标注,减少标注大规模数据集的成本,提升模型的泛化能力;针对路线识别需要处理大规模数据集,路线识别速度慢,导致田地管理决策延迟,影响农作物的种植和生长的技术问题,采用轻量化田地路线识别模型,并运用网络剪枝和量化操作来缩小深度神经网络的规模和计算复杂度,使用学习率自适应方法通过反向传播更新模型参数,加快路线识别速度,提高模型的训练稳定性和收敛速度;针对田地环境受多种因素影响,干扰路线识别的准确性,影响田地的正常运营的技术问题,采用路线加权平滑算法对路线进行平滑处理,利用形态学操作来去除细小的边缘连接和孤立的细线,提取出主要的路线形状,提高路线识别的准确性;针对存在田地路线识别可视化不准确,导致无法直观看出田地的路线分布、形状和连接关系,限制对农田管理和农作物种植的深入研究和决策支持的技术问题,采用立体匹配处理和强度自适应滤波进行视差图处理,利用处理后的最佳视差图,使用增量三角分割法结合已知的摄像机参数和田地图像特征进行地形三维重建,实现田地路线的三维场景可视化效果。
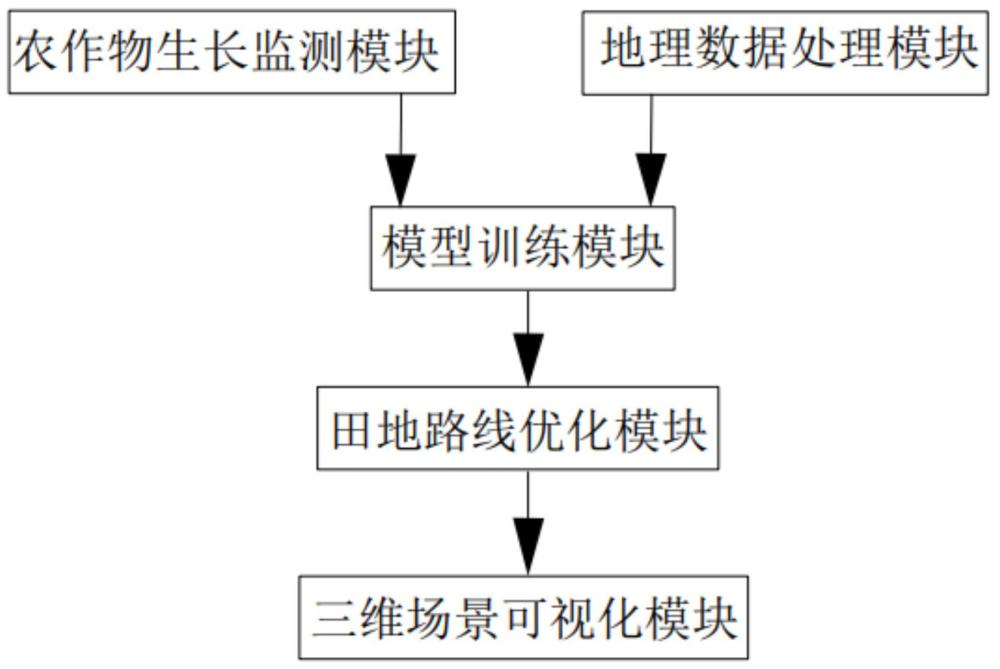
2、本发明提供的基于大数据分析的田地路线识别系统,包括农作物生长监测模块、地理数据处理模块、田地路线识别模型训练模块、田地路线优化模块和三维场景可视化模块;
3、所述农作物生长监测模块利用遥感技术获取农作物监测数据,提取农作物特征;
4、所述地理数据处理模块收集田地道路图像进行数据清洗和图像校正与增强,再使用半监督数据标注算法,通过数据点之间的相似性进行标签传播,标签经过节点之间的边传递给相邻节点进行数据标注,得到标准田地图像数据;
5、所述田地路线识别模型训练模块接收来自地理数据处理模块的标准田地图像数据和农作物生长监测模块的农作物特征作为田地路线识别模型的输入,使用轻量化卷积神经网络结构,并运用网络剪枝和量化操作来缩小深度神经网络的规模和计算复杂度,使用学习率自适应方法通过反向传播更新模型参数,得到田地路线图像;
6、所述田地路线优化模块使用路线加权平滑算法对路线进行平滑处理,并对不必要的细节部分进行过滤操作,利用形态学操作来去除细小的边缘连接和孤立的细线,提取出主要的路线形状,并根据实际情况进行参数调整和优化,得到优化后的田地路线图像;
7、所述三维场景可视化模块获取对应时间段的优化后的田地路线图像,进行立体匹配处理得到视差图,使用强度自适应滤波进行视差图处理,利用处理后的最佳视差图,使用增量三角分割法结合已知的摄像机参数和田地图像特征进行地形三维重建,进行地形渲染,实现田地路线的三维场景可视化效果。
8、进一步地,在农作物生长监测模块中,利用遥感技术获取农作物的监测数据,对采集到的农作物的监测数据进行预处理,包括图像校正、影像配准和去除天气干扰,再从预处理后的遥感数据中提取农作物的特征。
9、进一步地,在地理数据处理模块中,设有数据收集单元、数据筛选单元、图像校正与增强单元、数据标注单元和数据划分单元,所述地理数据处理模块包括以下内容:
10、数据收集单元,使用无人机、卫星影像和地面摄像机收集田地数据,将多种不同来源的数据进行融合,得到田地信息数据;
11、数据筛选单元,对收集的田地信息数据进行数据预处理,并根据道路的特征、杂乱度和光照条件从收集到的数据中筛选出适用于田地路线识别的田地图像数据;
12、图像校正与增强单元,对收集到的田地图像数据进行校正,包括纠正图像倾斜、透视校正,同时进行图像增强操作,得到田地图像数据集;
13、数据标注单元,针对大规模的田地图像数据集,使用半监督数据标注算法进行标注,得到标准田地图像数据,所述数据标注单元包括以下内容:
14、根据田地图像数据集构建一个图模型,图模型中每个数据样本对应一个数据节点,将有标签的数据节点的标签信息初始化为真实标签,无标签的数据节点的标签信息初始化为0;
15、定义相似度矩阵,根据图模型,使用邻接矩阵计算节点之间的相似度,得到相似度矩阵,所用公式如下:
16、;
17、式中,s是相似度矩阵,a是邻接矩阵,表示图模型中节点之间的连接关系,q是度矩阵,度矩阵对角线上的元素表示与节点相连的边的数量;
18、迭代更新标签,根据当前节点的相邻节点的标签信息,计算加权平均值,并将该平均值作为当前节点的新标签;
19、设置终止条件,预设最大迭代次数,达到最大迭代次数时,停止迭代;没有达到最大迭代次数时,继续迭代更新标签;没有达到最大迭代次数,但标签更新达到收敛效果时,停止迭代,迭代结束后,得到每个节点的最终标签。
20、进一步地,在田地路线识别模型训练模块中,设有构建田地路线识别模型单元、网络剪枝与量化单元、前向传播单元、反向传播单元和模型部署单元,所述田地路线识别模型训练模块包括以下内容:
21、构建田地路线识别模型单元,使用轻量化卷积神经网络架构和深度可分离卷积减少参数量和计算量,保持路线识别准确的同时提高实时性能;
22、网络剪枝与量化单元,根据标准田地图像数据设计模型的层数和参数,运用网络剪枝和量化技术删除冗余的连接、神经元节点和不重要参数,并将模型的权重从浮点数表示转换为较低精度的定点数表示;
23、前向传播单元,将标准田地图像数据和农作物特征输入田地路线识别模型中进行前向传播,获取田地图像特征;
24、反向传播单元,在训练过程中,通过反向传播算法不断调整模型权重和偏置,使用学习率自适应方法,提高模型的训练稳定性和收敛速度,所述反向传播单元包括以下内容:
25、对于每个可训练参数a,初始化参数的一阶矩变量m和二阶矩变量n为0,初始化时间t为1,计算当前的梯度g;
26、更新一阶矩变量,通过指数加权平均计算,所用公式如下:
27、m1=ω1×m+(1-ω1)×g;
28、式中,ω1是衰减率一号,取值0.9,g是梯度,m是初始化的一阶矩变量,m1是更新后的一阶矩变量;
29、更新二阶矩变量,通过指数加权平均计算,所用公式如下:
30、n1=ω2×n+(1-ω2)×g2;
31、式中,ω2是衰减率二号,取值0.999,g是梯度,n是初始化的二阶矩变量,n1是更新后的二阶矩变量;
32、纠正偏差,对更新后的一阶矩变量m1和更新后的二阶矩变量n1进行偏差修正,所用公式如下:
33、;
34、;
35、式中,t是时间,mx是修正后的一阶矩变量,nx是修正后的二阶矩变量;
36、更新参数,所用公式如下:
37、;
38、式中,a是可训练参数,a1是更新后的可训练参数,λ是为了数值稳定添加的趋近于0的数,取10-8,θ是学习率;
39、模型部署单元,田地路线识别模型训练完成后,将模型应用在实际的田地路线识别中,对新的田地图像数据进行路线识别,得到田地路线图像。
40、进一步地,在田地路线优化模块中,设有路线平滑单元、细节过滤单元和参数调整和优化单元,所述田地路线优化模块包括以下内容:
41、路线平滑单元,使用路线加权平滑算法对田地路线图像进行平滑处理,所述路线平滑单元包括以下内容:
42、定义二维高斯滤波模版,确定模版的大小和标准差,创建二维矩阵存储高斯滤波模版中各位置的权重值,计算模版中每个像素的高斯权重,对高斯权重进行归一化,最后得到的矩阵就是二维高斯滤波模版,所述定义二维高斯滤波模版包括以下内容:
43、创建一个大小为k×k的二维矩阵,存储高斯滤波模版中各位置的权重值,对于模版中的每个像素(i,j),计算此像素对应的高斯权重w(i,j),所用公式如下:
44、;
45、式中,w(i,j)是模版中位置(i,j)处的权重值,σ是高斯核的标准差,是模版中像素位置(i,j)到模版中心的距离,控制像素的权重值,距离越远,权重值越小;
46、对高斯滤波模版进行归一化,使所有高斯权重之和为1,确保滤波后图像的亮度保持不变,求归一化后的权重值,所用公式如下:
47、;
48、式中,w1(i,j)是归一化后的权重值,∑w(i,j)是所有权重值之和;
49、对田地路线图像进行边界扩展,在图像边界处进行滤波,对图像的每个像素进行滤波操作,将二维高斯滤波模版放置到滤波后的像素的位置上,计算加权平均值作为滤波后的像素值,所用公式如下:
50、;
51、式中,(x,y)是滤波后的像素的位置,ifiltered(x,y)是滤波后的像素值,i(x+i,y+j)是田地路线图像中位置(x+i,y+j)的像素值,w(i,j)是模版中位置(i,j)处的权重值;
52、去除边界扩展部分,恢复田地路线图像的原始大小,得到平滑处理后的田地路线图像;
53、细节过滤单元,对平滑处理后的田地路线图像中不必要的细节部分进行过滤操作,利用形态学操作来去除细小的边缘连接和孤立的细线,提取出主要的路线形状,所述细节过滤单元包括以下内容:
54、对平滑处理后的田地路线图像进行预处理,包括灰度化处理和二值化处理,将平滑处理后的田地路线图像转换为二值图像;
55、使用选择的矩形内核对二值图像进行腐蚀操作,将二值图像中的细小边缘连接和孤立的细线逐渐缩小;
56、对腐蚀操作后的二值图像进行膨胀操作,恢复图像中的主要路线的形状,去除二值图像中的细小边缘连接和孤立的细线;
57、参数调整和优化单元,在路线平滑和细节过滤的过程中,根据实际情况进行内核尺寸调整和内核形状优化。
58、进一步地,在三维场景可视化模块中,设有数据获取与预处理单元、立体匹配单元、视差图处理单元和地形三维重建单元,所述三维场景可视化模块包括以下内容:
59、数据获取与预处理单元,获取对应时间段的优化后的田地路线图像,对数据进行预处理,包括去噪、清洗和辐射矫正;
60、立体匹配单元,将获取到的两张时间段的优化后的田地路线图像进行立体匹配处理,将两张图像对应的像素点进行匹配,得到视差信息,遍历像素点之间的马氏距离,选择马氏距离最小的位置作为视差图的最佳匹配位置,定义进行最佳匹配的视差图为最佳视差图,具体为将像素点表示为特征向量,定义有两个n维特征向量x、y,求x与y之间的马氏距离,所用公式如下:
61、;
62、;
63、式中,d(x,y)是x和y之间的马氏距离,c是协方差矩阵,cov是协方差运算符,c-1是协方差矩阵的逆矩阵;
64、视差图处理单元,对最佳视差图进行处理,包括去除噪声和填充缺失数据,得到处理后的最佳视差图,所述视差图处理单元包括以下内容:
65、使用强度自适应滤波去除噪声,所述去除噪声包括以下内容:
66、根据图像细节保留程度和图像平滑程度,确定强度自适应滤波器的大小,对于最佳视差图内的每个像素点,取其周围邻域内的像素值,并计算邻域内的像素值的均值和方差,根据像素值的强度差异进行权重计算,根据得到的权重值对邻域内的像素值进行加权平均,将加权平均后的像素值作为当前像素点的新像素值,更新对应位置的最佳视差图像素值,直到遍历完整个最佳视差图;
67、使用无效值区域填充算法处理最佳视差图中的缺失数据,所述填充缺失数据包括以下内容:
68、通过预设的空洞检测阈值检测出最佳视差图中视差值为无效值的区域,选择基于优化的填充算法,通过最小化能量函数对视差值为无效值的区域进行填充,根据空洞边界条件进行填充迭代,直至空洞全部填充完毕,修复填充后的最佳视差图,得到处理后的最佳视差图;
69、地形三维重建单元,利用处理后的最佳视差图,使用增量三角分割法结合已知的摄像机参数和田地图像特征进行地形三维重建,所述地形三维重建单元包括以下内容:
70、将所有田地图像特征放入一个超级三角形,建立空的三角形列表t-list,对于每个要加入的田地图像的特征点p,找到包含特征点p的三角形t,删除三角形t,再连接特征点p与三角形t的每个边,形成三个新的三角形,检查新生成的三角形是否满足增量三角分割规则,如果不满足,进行局部修复操作调整三角形的连接关系,将修复后的三角形加入三角形列表t-list中,重复此过程直至所有特征点都被处理,得到三角形网格;
71、重建地形高程,根据已知的摄像机参数和处理后的最佳视差图,通过三角网络中的相邻三角形之间的视差差异计算相应点的三维坐标,根据三维坐标,重建地形高程,进行地形高程重建后,进行补全和平滑处理,并根据地形设置合适的材质、纹理和光照的参数,进行地形渲染,实现田地路线的三维场景可视化效果。
72、采用上述方案本发明取得的有益效果如下:
73、(1)针对存在准确的路线识别需要大规模的标注数据集,但是标注田地图像数据耗时且人力成本高,限制数据的规模和多样性,难以应对数据集的更新与变化的技术问题,采用半监督数据标注算法,通过数据点之间的相似性进行标签传播,标签经过节点之间的边传递给相邻节点进行数据标注,减少标注大规模数据集的成本,提升模型的泛化能力;
74、(2)针对路线识别结果无法及时获得,导致田地管理决策延迟,影响农作物的种植和生长的技术问题,采用田地路线识别模型,使用轻量化卷积神经网络结构,并运用网络剪枝和量化操作来缩小深度神经网络的规模和计算复杂度,使用学习率自适应方法通过反向传播更新模型参数,加快路线识别速度,提高模型的训练稳定性和收敛速度;
75、(3)针对存在田地的场景和环境受多种因素影响,导致田地图像质量下降,干扰路线识别的准确性,非路线数据错误识别为路线,影响田地的正常运营的技术问题,采用路线加权平滑算法对路线进行平滑处理,利用形态学操作来去除细小的边缘连接和孤立的细线,提取出主要的路线形状,简化田地路线,突出主要线段;
76、(4)针对存在田地路线识别可视化不准确,导致无法直观看出田地的路线分布、形状和连接关系,限制对农田管理和农作物种植的深入研究和决策支持的技术问题,采用立体匹配处理得到视差图,使用强度自适应滤波进行视差图处理,利用处理后的最佳视差图,使用增量三角分割法结合已知的摄像机参数和田地图像特征进行地形三维重建,进行地形渲染,实现田地路线的三维场景可视化效果。
- 还没有人留言评论。精彩留言会获得点赞!