一种基于超体聚类和半径曲率特征的目标识别方法及装置与流程
本发明涉及图像分割,尤其涉及一种基于超体聚类和半径曲率特征的目标识别方法及装置。
背景技术:
1、随着科学技术的发展,船舶系统越来越智能,当前船舶系统追求自主性和高智能性。图像分割技术是船舶系统对环境具有识别能力的关键技术。随着激光三维测距技术的快速发展,出现了很多能够采集三维空间场景中三维信息的三维摄像机,以前针对二维图像的分割方法很难适用于基于三维信息的图像分割。因此,更多研究者逐渐投入到基于三维空间信息的图像技术研究中。为了让船舶系统识别视野场景中物体对象并方便后续任务的实施,三维分割并将目标物体建模的研究实现具有巨大的现实意义,未来发展前景十分可观。
2、因此,针对上述问题,业内急需一种基于超体聚类和半径曲率特征的目标识别方法及装置。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是提供一种基于超体聚类和半径曲率特征的目标识别方法及装置,解决场景中目标物体建模中传统分割算法运算量较大的技术问题。
3、(二)技术方案
4、为解决上述技术问题,本发明的第一方面提供了一种基于超体聚类和半径曲率特征的目标识别方法,包括以下步骤:
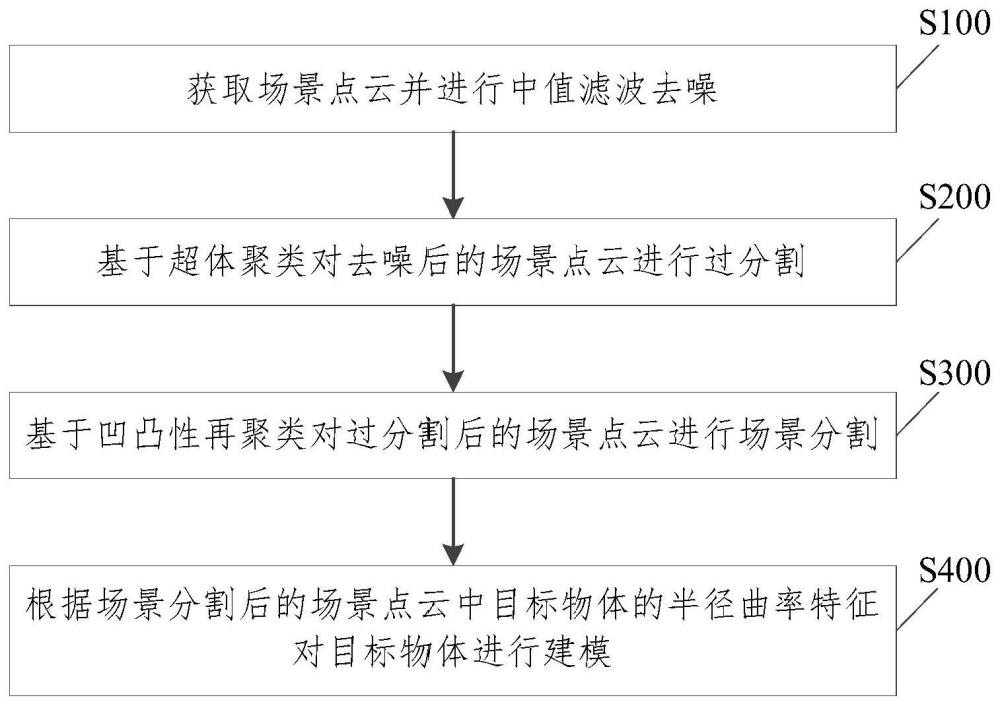
5、获取场景点云并进行中值滤波去噪;
6、基于超体聚类对去噪后的场景点云进行过分割;
7、基于凹凸性再聚类对过分割后的场景点云进行场景分割;
8、根据场景分割后的场景点云中目标物体的半径曲率特征对所述目标物体进行建模。
9、进一步地,所述获取场景点云并进行中值滤波去噪,具体为:
10、利用深度摄像头获取场景点云并通过点云库进行中值滤波去噪。
11、进一步地,所述基于超体聚类对去噪后的场景点云进行过分割,具体为:
12、在去噪后的场景点云基础之上进行超体聚类过分割,控制超体素聚类过程,将整个空间划分开。
13、进一步地,所述在去噪后的场景点云基础之上进行超体聚类过分割,控制超体素聚类过程,将整个空间划分开,具体为:
14、依据第一公式将整个空间划分开,其中,所述第一公式为
15、
16、式中,rseed表示种子的距离,dc表示颜色上的差异,dn表示法线上的差异,ds表示点距离上的差异,wc表示颜色差异在超体素相似度中的权重,ws表示点距离差异在相似度中的权重,wn表示法线上的差异在相似度中的权重。
17、进一步地,所述基于凹凸性再聚类对过分割后的场景点云进行场景分割,具体为:
18、在超体聚类基础之上基于凹凸性再聚类进行局部凸连接分割,完成场景分割。
19、进一步地,两个超体素表面之间的夹角为θ,当θ角越接近90°时,则两个超体素表面是连接的;当θ角越接近0°时,则两个超体素表面是不连接的。
20、进一步地,所述根据场景分割后的场景点云中目标物体的半径曲率特征对所述目标物体进行建模,具体包括如下步骤:
21、拟合出目标点与其领域点所有曲线对应的所有曲率半径,确定其中的最小曲率半径与最大曲率半径为所述目标点的半径曲率特征值;
22、根据所述目标点的曲率半径特征值,利用随机采样一致性去拟合场景中的目标物体。
23、本发明的第二方面提供了一种基于超体聚类和半径曲率特征的目标识别装置,包括:
24、点云获取单元,用于获取场景点云并进行中值滤波去噪;
25、过分割单元,用于基于超体聚类对去噪后的场景点云进行过分割;
26、场景分割单元,用于基于凹凸性再聚类对过分割后的场景点云进行场景分割;
27、目标建模单元,用于根据场景分割后的场景点云中目标物体的半径曲率特征对所述目标物体进行建模。
28、本发明的第三方面提供了一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的基于超体聚类和半径曲率特征的目标识别方法。
29、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述的基于超体聚类和半径曲率特征的目标识别方法。
30、(三)有益效果
31、本发明的上述技术方案具有如下优点:
32、本发明的基于超体聚类和半径曲率特征的目标识别方法,具有计算费时少,场合适用性强的优点。
技术特征:
1.一种基于超体聚类和半径曲率特征的目标识别方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的基于超体聚类和半径曲率特征的目标识别方法,其特征在于,所述获取场景点云并进行中值滤波去噪,具体为:
3.根据权利要求1所述的基于超体聚类和半径曲率特征的目标识别方法,其特征在于,所述基于超体聚类对去噪后的场景点云进行过分割,具体为:
4.根据权利要求3所述的基于超体聚类和半径曲率特征的目标识别方法,其特征在于,所述在去噪后的场景点云基础之上进行超体聚类过分割,控制超体素聚类过程,将整个空间划分开,具体为:
5.根据权利要求1所述的基于超体聚类和半径曲率特征的目标识别方法,其特征在于,所述基于凹凸性再聚类对过分割后的场景点云进行场景分割,具体为:
6.根据权利要求5所述的基于超体聚类和半径曲率特征的目标识别方法,其特征在于,两个超体素表面之间的夹角为θ,当θ角越接近90°时,则两个超体素表面是连接的;当θ角越接近0°时,则两个超体素表面是不连接的。
7.根据权利要求1所述的基于超体聚类和半径曲率特征的目标识别方法,其特征在于,所述根据场景分割后的场景点云中目标物体的半径曲率特征对所述目标物体进行建模,具体包括如下步骤:
8.一种基于超体聚类和半径曲率特征的目标识别装置,其特征在于,包括:
9.一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的基于超体聚类和半径曲率特征的目标识别方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的基于超体聚类和半径曲率特征的目标识别方法。
技术总结
本发明涉及图像分割技术领域,尤其涉及一种基于超体聚类和半径曲率特征的目标识别方法及装置。本发明的基于超体聚类和半径曲率特征的目标识别方法,包括步骤:获取场景点云并进行中值滤波去噪;基于超体聚类对去噪后的场景点云进行过分割;基于凹凸性再聚类对过分割后的场景点云进行场景分割;根据场景分割后的场景点云中目标物体的半径曲率特征对目标物体进行建模。其能够解决场景中目标物体建模中传统分割算法运算量较大的问题,具有计算费时少,场合适用性强的优点。
技术研发人员:王耀增,刘涛,师杰,丰云礼,叶毅
受保护的技术使用者:中国船舶集团有限公司系统工程研究院
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!