基于时空特征自适应共享网络的无人机故障诊断方法
本发明涉及无人机故障诊断,具体涉及一种基于时空特征自适应共享网络的无人机故障诊断方法。
背景技术:
1、无人机因其具有体积小、成本低等的特点,广泛应用在商业、军事和民用等领域。而随着无人机应用领域的扩大和任务复杂性的增加,故障诊断方法的创新对于确保无人机的安全性和可靠性至关重要。只有了解无人机故障原因,才能更好地处理与预测无人机的故障。
2、现有的无人机故障诊断方法有很多种,常见的有基于专家系统的经验方法,以及基于模型的方法等。当前,利用深度学习技术进行无人机故障诊断成为了最有潜力的新型诊断方法,该类方法相较于前者,具有更为强大的非线性特征提取能力,能够达到更高的无人机故障诊断精度。具体地,在深度学习方法的运作中,需要依赖大量的故障数据以供诊断模型学习。然而,现实世界中可用的故障数据非常有限,这大大限制了深度学习的进一步应用。
技术实现思路
1、本发明意在提供一种基于时空特征自适应共享网络的无人机故障诊断方法,能够从有限的样本中获取丰富的故障诊断知识,能够达到较高的诊断精准度和完善度。
2、本发明提供的基础方案为:基于时空特征自适应共享网络的无人机故障诊断方法,包括以下步骤:
3、步骤1,采集无人机飞行数据;
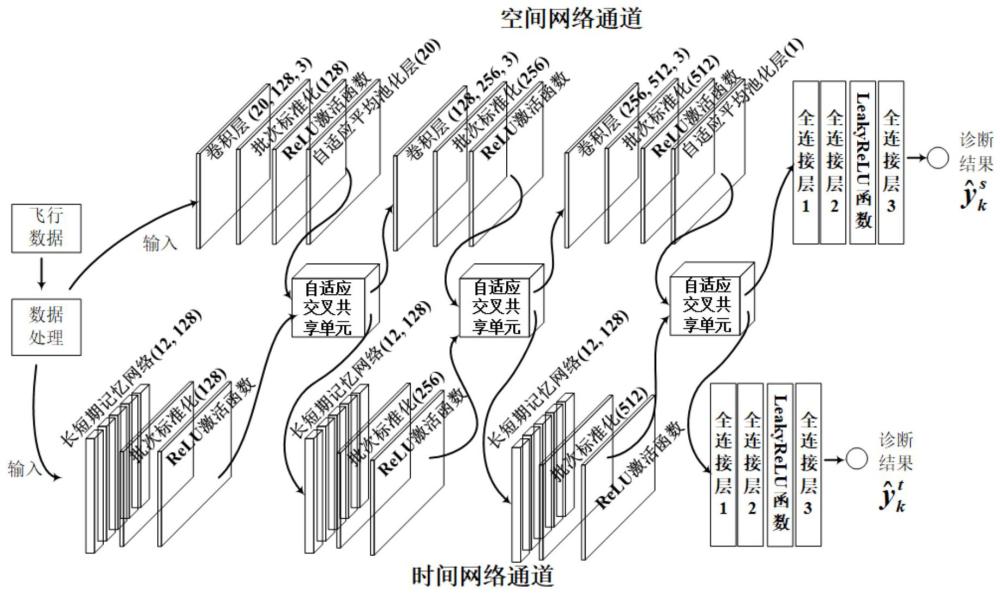
4、步骤2,将无人机飞行数据输入到预设的stasn网络中;所述stasn网络中设有用于提取空间特征的空间网络通道和用于提取时间特征的时间网络通道;并且,空间网络通道与时间网络通道中的特征信息经过acsu单元共享,以实现知识互补;
5、步骤3,由stasn网络输出故障诊断结果;
6、其中,在stasn网络的空间网络通道和时间网络通道中均设有全连接层和输出层;stasn网络的空间网络通道输出故障诊断结果时,按照下述步骤输出:
7、;
8、其中,是输出层的输入,表示第3次共享后的空间特征;是预测为故障类别1的概率,fc1、fc2、fc3是全连接层计算操作,leakyrelu指修正线性单元函数;、、分别是全连接层fc1、全连接层fc2和全连接层fc3的权重矩阵;
9、=max;
10、其中,则是max函数选出概率最大的故障类别,即为空间网络通道输出的故障诊断结果;
11、stasn网络的时间网络通道输出故障诊断结果时,按照下述步骤输出:
12、;
13、其中,是输出层的输入,表示第3次共享后的空间特征;是预测为故障类别1的概率,fc1、fc2、fc3是全连接层计算操作,、、是全连接层fc1、全连接层fc2和全连接层fc3的权重矩阵;
14、=max;
15、其中,则是max函数选出概率最大的故障类别,即为时间网络通道输出的故障诊断结果。
16、本发明的工作原理及优点在于:
17、本发明提供的基于时空特征自适应共享网络的无人机故障诊断方法,利用预设的stasn网络对无人机飞行数据进行处理。其中,stasn网络中设有的空间网络通道和时间网络通道能够自无人机飞行数据(即样本)中,分别提取飞行数据中的空间特征和时间特征。其空间特征包含局部信息,时间特征则反映了长距离依赖关系。再通过将空间网络通道与时间网络通道中的特征信息进行共享;本stasn网络能够通过此种将时间与空间特征共享的方式,捕获到更加丰富的故障诊断相关信息,进而能够在有限的样本条件下,获取更丰富的故障诊断知识,并达到较优的故障分析能力和诊断能力。
18、特别的是,本方案与常规的如数据扩充等方法不同,常规方案往往局限于样本量本身的扩充,通过解决样本稀少的问题来提升诊断性能,但此种方式的可靠度有限。本方案则不同于此类扩充式的处理方法,而是提出了一种新的在小样本条件下通过深度挖掘故障诊断知识的方法,所设置的stasn网络通过共享具有不同属性的空间特征和时间特征,以获得更加丰富的故障诊断知识从而提高性能,并且,获得的故障诊断知识信息真实可靠。
技术特征:
1.基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,所述空间网络通道设有cnn、batchnorm层、relu层和adaavgpool层。
3.根据权利要求1所述的基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,所述时间网络通道设有lstm、batchnorm层和relu层。
4.根据权利要求1所述的基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,所述空间网络通道与时间网络通道中的特征信息经过三次自适应交叉共享。
5.根据权利要求1所述的基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,在共享过程中,采用acsu单元自适应地共享空间网络通道和时间网络通道中所捕获的特征信息。
6.根据权利要求5所述的基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,所述acsu单元采用线性组合以建模时间特征与空间特征的共享表示,包括:
7.根据权利要求1所述的基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,所述stasn网络采用端到端的学习框架。
8.根据权利要求1所述的基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,所述空间网络通道和时间网络通道的loss值采用下式进行计算:
9.根据权利要求8所述的基于时空特征自适应共享网络的无人机故障诊断方法,其特征在于,在步骤2中,还对stasn网络进行优化;所述优化包括通过反向传播,并使用adam优化器更新网络参数。
技术总结
本发明涉及无人机故障诊断技术领域,公开了一种基于时空特征自适应共享网络的无人机故障诊断方法,包括以下步骤:步骤1,采集无人机飞行数据;步骤2,将无人机飞行数据输入到预设的STASN网络中;所述STASN网络中设有用于提取空间特征的空间网络通道和用于提取时间特征的时间网络通道;并且,空间网络通道与时间网络通道中的特征信息经过自适应交叉共享单元(ACSU)数次共享,实现知识互补;步骤3,由STASN网络输出故障诊断结果。本发明能够从有限的样本中获取丰富的故障诊断知识,能够达到较高的诊断精准度和完善度。
技术研发人员:李少波,张仪宗,李传江,张安思,张羽,张宏辉
受保护的技术使用者:贵州大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!