一种基于多分辨率的工业CT图像点云获取方法
本发明属于图像处理领域,涉及一种基于多分辨率的工业ct图像点云获取方法。
背景技术:
1、工业ct(计算机断层扫描)成像技术在制造业、航空航天、汽车、医疗和其他领域中广泛应用。它提供了一种非破坏性的测试和检测方法,能够获取物体内部的三维结构和密度信息。工业ct图像是由x射线或其他射线源穿透被测物体并被接收器捕获的一系列二维切片图像组成。在许多工业应用中,将工业ct图像转换为三维点云数据是重要的任务。点云是一组三维坐标点的集合,每个点表示物体表面的一个样本点。点云数据具有丰富的几何和拓扑信息,可用于质量检查、逆向工程、虚拟样机、尺寸测量、缺陷分析和模拟等应用。
2、然而,从工业ct图像中生成高质量的点云数据仍然面临一些挑战。首先,工业ct图像通常受到噪声、伪影和散射等因素的影响,这可能导致点云中的不确定性和不准确性。其次,工业ct图像的数据量庞大,处理和分析这些大规模数据需要高效的算法和计算资源。此外,工业应用通常需要对不同细节级别的几何形状进行精确表示,以满足各种应用需求。
3、现有的点云获取方法存在一些局限性。基于体素化的方法可以通过将ct图像转换为体素网格来提取点云,但其在处理复杂几何形状时可能导致数据冗余和计算复杂度增加。其他方法可能使用基于特征提取或表面重建的技术,但在处理大规模数据时可能存在计算效率和准确性方面的挑战。
4、针对零件表面点云获取,刘永治,郭忠超,周玲在《计算机时代》(2021(03):46-48)的文章“一种零件表面点云数据的获取方法”中提出提出一种基于线激光扫描的零件表面点云数据获取方法。首先对相机进行标定,可用于对相机采集到的图像进行矫正,同时得到相机的内外参数,用于后续图像处理的坐标转换;再利用图像采集系统采集图像,对图像依次进行高斯滤波、图像差分、高斯平滑、条纹中心线提取、坐标转换,得到零件表面的三维点云数据,但线激光扫描对于不可见或遮挡的表面区域无法获取数据。针对曲面点云获取方法,王鑫,詹总谦,索一凡在《测绘地理信息》(2016,41(02):36-39)的文章“一种基于黑白光栅条纹的曲面点云获取方法研究”提出改进一种基于黑白光栅条纹的立体匹配方法,设计带有特征的光栅条纹,并利用该条纹进行光栅解码得到黑白条纹的编号;计算影像所有核线与所有编码条纹的交点,得到同名立体匹配点,但引入特征设计和解码算法会增加方法的复杂性,特征设计和解码算法可能增加误匹配的风险。这些方法都能实现点云获取,但以上方法实用性不够强,因此,需要一种创新的方法,能够高效准确地从工业ct图像中生成点云数据。这样的方法将克服现有方法的局限性,提供高质量、可扩展和灵活的点云获取解决方案,以满足工业应用中对精确几何信息的需求。
5、cn113516662a,一种基于多分辨率融合的点云分割方法和装置,涉及计算机视觉与机器学习技术领域,其中,方法包括:获取待分割图像,通过预测器对待分割图像进行点云分割,获取原始点云分割结果;对待分割图像进行降采样,获取低分辨率图像特征;通过预测器对低分辨率图像特征进行点云分割,获取低分辨率点云分割结果;对低分辨率点云分割结果进行上采样的优化更新处理,获取与原始点云分割结果相同分辨率的目标点云分割结果,并将原始点云分割结果和目标点云分割结果进行融合处理,并输出点云分割结果。由此,解决现有点云分割框架中,对低分辨率信息利用不充分的问题,将低分辨率点云分割结果直接用于分割结果的预测,提高点云分割准确性。
6、专利中先降采样再上采样的点云分割会导致一些细节信息的丢失,在降采样-上采样结构的点云分割框架,分割速度较慢。本发明通过先上采样后降采样进行多分辨率点云分割,可以保留更多的信息,提高了分割精度,能够降低图像中噪声、伪影和低对比度的影响,同时能够获取连续性更好、没有断边现象的分割结果。在点云分割框架中,同时使用了加速分割算法,提高了分割速度。
技术实现思路
1、本发明旨在解决以上现有技术的问题。提出了一种基于多分辨率的工业ct图像点云获取方法。本发明的技术方案如下:
2、一种基于多分辨率的工业ct图像点云获取方法,其包括以下步骤:
3、步骤1:将工业ct切片图像o按垂直于扫描方向堆叠为三维图像t,根据27连通模型对工业ct三维图像进行预处理得到预处理三维图像p;
4、步骤2:对预处理后的工业ct三维图像p进行加速三维分割得到分割结果s;
5、步骤3:对分割结果s实施点云数据获取。
6、进一步的,所述步骤1中的将工业ct切片图像o按垂直于扫描方向堆叠为三维图像t,具体包括:
7、1)定义垂直于扫描方向为z轴,并以远离ct机旋转台方向为z轴正方向,按z轴正方向依次对ct切片图像进行编号;
8、2)依次读入编号后ct切片图像并按z轴增加次序进行叠加获得其三维图像t。
9、进一步的,所述步骤1根据27连通模型对工业ct三维图像进行预处理得到预处理三维图像p,具体包括:
10、1)新建一个与三维图像t尺寸相同的空图像p,对三维图像t中每一个像素,取其27领域像素集;27领域指的是以该像素为中心,包括该像素在内的周围共27个像素的集合;
11、2)计算27领域内像素灰度均值,令空图像p中相应像素值等于此灰度均值,遍历所有像素后,空图像即为预处理后三维图像p。
12、进一步的,所述27连通模型表示为:
13、
14、式中v(x,y,z)表示像素点(x,y,z)的27连通值,f(x,y,z)表示像素点(x,y,z)的灰度值,m表示像素点的位置。
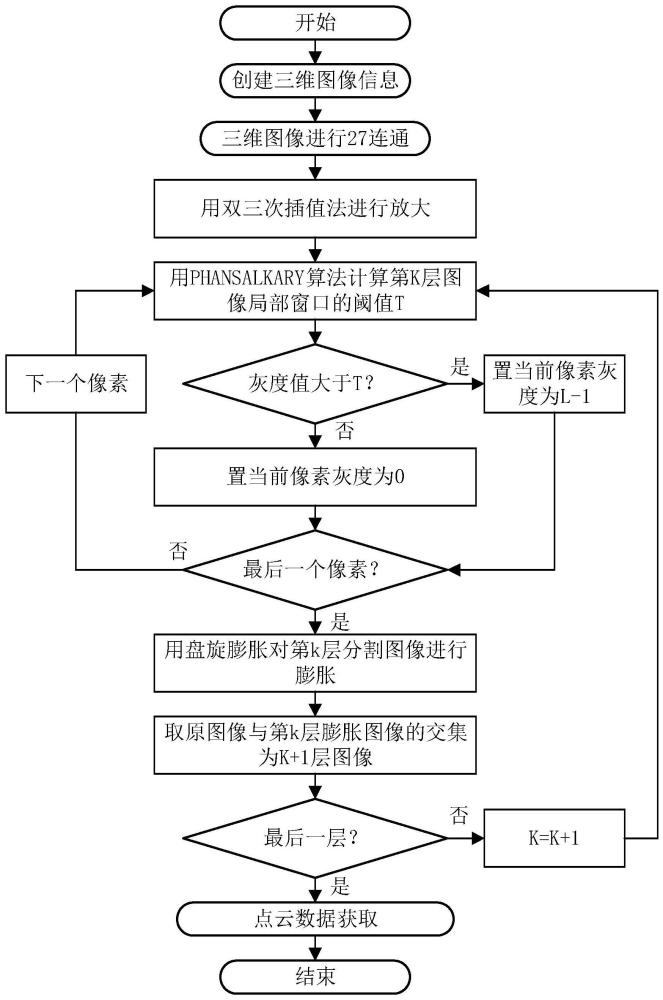
15、进一步的,所述步骤2对预处理后的工业ct三维图像p进行加速三维分割得到分割结果s,具体包括:
16、1)对其中每层图像进行基于双线性插值的多分辨率放大,令k=1;
17、2)对放大后的第k层图像,采用phansalkar阈值分割算法进行三维分割;
18、3)采用对盘形膨胀结构对第k层叶片ct切片图像分割结果进行膨胀得到膨胀图像;
19、4)对第k+1层图像,取原图像与第k层膨胀图像的交集部分,对此部分采用phansalkar阈值分割算法进行三维分割,得到第k+1层图像的分割结果;
20、5)若是最后一层图像,结束,否则k=k+1,转到步骤2)。
21、进一步的,所述phansalkar阈值分割算法具体包括以下步骤:
22、方式a:令i=1,j=1;
23、方式b:将图像p中第i行、第j列像素设为当前局部窗口中心,局部窗口尺寸为s×s×3;
24、方式c:计算在窗口尺寸内三维图像所有像素的灰度均值μlocal;
25、方式d:计算在窗口尺寸内三维图像所有像素的灰度方差σlocal;
26、方式e:计算阈值t=μlocal×(1+p×e-q×μ)+k×((σlocal/r)-1));
27、方式f:若pij灰度大于t,将分割结果中对应像素rij的灰度置为l-1,否则置为0;结束判断;若i=h且j=w则结束;若j<w则j=j+1,转到方式b);若i<h且j=w则i=i+1,j=1,转到方式b);
28、其中h,w为图像p的长和宽,灰度级为l,i表示行,j表示列,局部边长为s,(q,p,k,r)为phansalkar算法参数。
29、进一步的,所述对第k层叶片ct切片图像分割结果进行膨胀得到膨胀图像;具体步骤为:
30、方式a:定义结构元素用于指定膨胀操作的形状和大小;
31、方式b:将定义的结构元素与原始图像进行匹配,将结构元素的每个元素与原始图像中相应位置的像素进行比较;
32、方式c:如果结构元素的元素与原始图像中相应位置的像素匹配,则将结构元素覆盖到输出图像的相应位置,如果结构元素的元素与原始图像中相应位置的像素不匹配则跳过;
33、方式d:若遍历完整个原始图像,结束,否则转到方式b。
34、一种电子设备,其包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如任一项所述基于多分辨率的工业ct图像点云获取方法。
35、一种非暂态计算机可读存储介质,其上存储有计算机程序,其所述计算机程序被处理器执行时实现如任一项所述基于多分辨率的工业ct图像点云获取方法。
36、一种计算机程序产品,包括计算机程序,其所述计算机程序被处理器执行时实现如任一项所述基于多分辨率的工业ct图像点云获取方法。
37、本发明的优点及有益效果如下:
38、本发明针对从工业ct图像结构拐点、局部对比度低等原因出现断点,导致亚像素级分割结果中相邻两点的距离可能大于一个像素,出现了断边现象,此问题大大降低了亚像素的精度,且阻碍了后续高精度点云生成,本发明提供一种基于多分辨率的工业ct图像点云获取方法。首先将工业ct切片图像堆叠为三维图像并进行预处理,再采用双线性插值进行多分辨率放大并用phansalkar阈值分割算法进行加速的三维分割,最后对分割结果实施点云数据获取。
39、本发明通过对工业ct切片图像进行堆叠得到三维图像,将三维图像进行预处理来提升图像质量,将预处理后的图像进行加速的三维分割,最后将分割结果实施点云数据获取。该方法能够获取得到高精度点云数据且没有断点问题。
40、本发明通过先上采样后降采样进行多分辨率点云分割,可以保留更多的信息,提高了分割精度,能够降低图像中噪声、伪影和低对比度的影响,同时能够获取连续性更好、没有断边现象的分割结果。在点云分割框架中,同时使用了加速分割算法,提高了分割速度。
- 还没有人留言评论。精彩留言会获得点赞!