一种公交车驾驶员驾驶行为预警评价方法、系统及装置
本发明涉及交通管理,尤其是一种公交车驾驶员驾驶行为预警评价方法、系统及装置。
背景技术:
1、目前,在交通事故中,由公交车驾驶员的不规范行为引起的事故比例远高于由车辆故障所导致。随着智慧交通的发展,运用数字技术来提升传统公交系统的运行安全和效率成为一个重要趋势。
2、尽管现有系统能够储存异常行为数据以供事后回放和分析,但它们未能实现对车辆行驶中安全隐患的实时提取和预警,因此在有效提升公交车驾乘安全方面存在局限。例如,专利公开号cn105898239a公开的系统仅将异常行为图片传入后台并编号储存,仅用于事故事后研判,其效果和实用性受限。而专利公开号cn14943403a公开的系统虽对公交驾驶员的不良行为进行评分评价并上传数据,便于公交公司管理,但该系统未能结合驾驶员表情进行实时预警,因此在纠正驾驶员错误行为方面存在时滞性,评价缺乏全面性。同样的,专利公开号cn110053627a公开的系统,在驾驶过程中仅分析驾驶技术和周边环境,没有考虑对驾驶员面部表情的分析,也显示出方法的局限性。
技术实现思路
1、本发明的目的是提供一种公交车驾驶员驾驶行为预警评价方法,该方法可以提升公交车辆驾乘安全性能,及时预警危险驾驶行为。
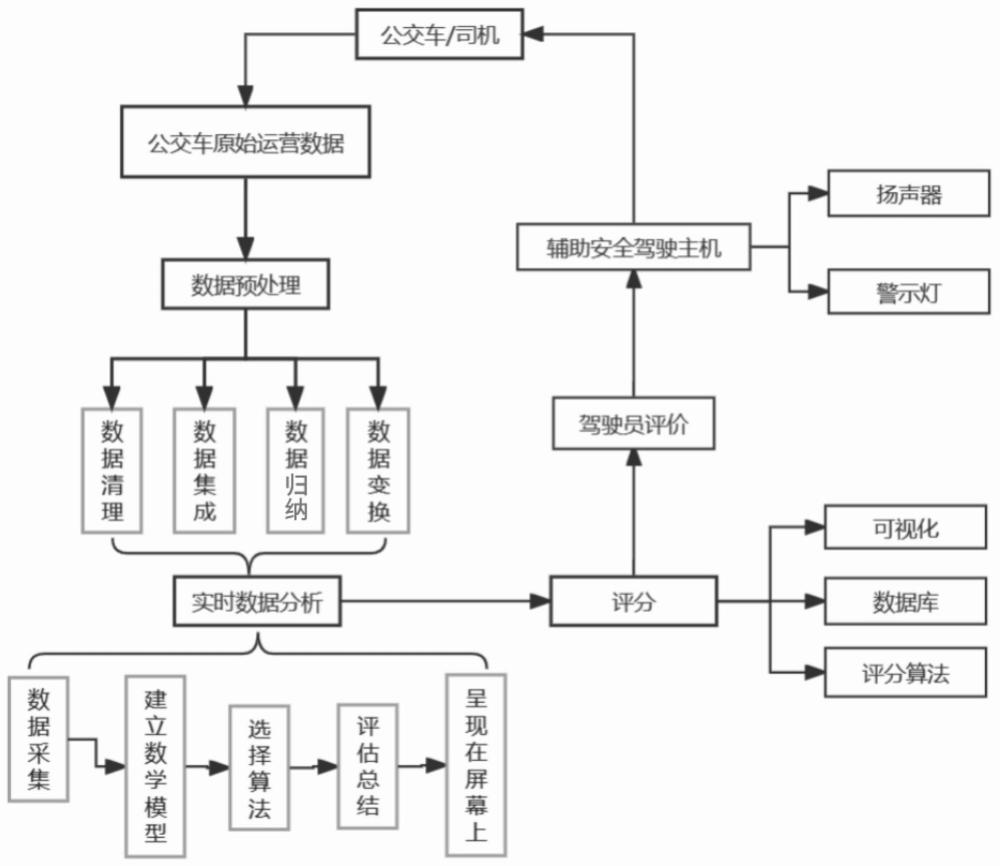
2、本发明提供的基础方案:一种公交车驾驶员驾驶行为预警评价方法,包括以下步骤:数据采集步骤、数据预处理步骤、深度学习训练步骤、行为识别及预警步骤、行为评价步骤;所述数据采集步骤用于采集车辆行驶状态数据和驾驶员状态数据;所述数据预处理步骤包括数据清洗、数据补全、地图匹配和行程划分,其中,数据清洗包括删除异常数据值,数据补全用于处理缺失数据段,地图匹配用于识别公交车正常运营路线;所述深度学习训练步骤中包括采用长短期记忆网络(lstm)、卷积神经网络(cnn)以及yolov5共同组成的深度学习算法模型,对采集和预处理的数据进行训练;所述行为识别及预警步骤基于训练后的深度学习模型,实时分析车辆行驶数据和车载图像,以识别异常驾驶行为;所述行为识别及预警步骤还包括当识别出异常行为时,及时预警驾驶员;所述行为评价步骤用于对驾驶员的行为进行评价,并将评价结果发送至管理平台。
3、本发明的实现原理与有益效果:数据采集步骤用于收集车辆行驶状态数据,为后续的行为分析提供基础。数据预处理步骤通过数据清洗、数据补全、地图匹配和行程划分等步骤,确保了数据的质量和完整性。其中,数据清洗能够删除异常数据,保证数据的准确性;数据补全则是处理数据的连续性问题,保证数据的完整性;通过地图匹配,可以确定驾驶员是否按照预定的路线行驶;行程划分子模块对采集的数据进行行程划分,将整个驾驶过程分解为一段段独立的行程,这样更有利于精细化管理和评价驾驶行为。深度学习训练步骤使用长短期记忆网络(lstm)、卷积神经网络(cnn)以及yolov5共同组成的深度学习算法模型,对采集和预处理的数据进行训练。lstm能够处理驾驶行为的时间序列模式;cnn能够提取驾驶过程中的视觉特征;yolov5可以实时检测出驾驶过程中的关键目标。通过这三种模型的联合训练,可以更全面、更精确地理解驾驶行为。行为识别及预警步骤以及行为评价步骤能够实时反馈驾驶员的行为评价,同时为驾驶员提供及时预警。
4、进一步,所述的数据补全包括第一补全策略、第二补全策略以及第三补全策略;所述第一补全策略中,对于缺失数据,若数据缺失时间超过设定阈值,则删除该数据段;若低于阈值,则采用线性插值或三次样条插值方法进行数据填补;所述第二补全策略中,当数据段符合采样频率但部分信息缺失时,使用基于前后数据点的平均速度计算来补全速度数据;若前后数据点显示车辆状态变化,则采用车辆熄火状态时的数据来补全;所述第三补全策略中,对于加速踏板和制动踏板状态的缺失数据,使用杠杆法进行数据补全。
5、本方案的有益效果为:在数据补全阶段,采用了三种不同的策略来处理不同类型的数据缺失,这不仅进一步保证了数据的完整性,而且有效地处理了数据缺失带来的不确定性,提高了评估结果的准确性。
6、进一步,所述深度学习算法模型中的lstm用于处理时间序列数据,cnn用于从lstm处理后的数据中提取特征。
7、所述深度学习训练步骤的lstm可用下式表示:
8、
9、
10、
11、
12、
13、
14、
15、
16、
17、其中,为t时刻的输入数据,表示对前一时刻信息的记忆,是由输入数据和单元状态组成的,其中,表示输入门的输入、表示遗忘门的输入、表示输出门的输入和表示存储单元的输入;分别是各部分在不同激活函数后的输出,其中,表示输入门的输出、表示遗忘门的输出、表示输出门的输出和表示存储单元的输出;分别为网络的权重矩阵,其中表示输入门相对于当前输入的权重矩阵、表示遗忘门相对于当前输入的权重矩阵、表示输出门相对于当前输入的权重矩阵和表示存储单元相对于当前输入的权重矩阵;表示输入门相对于前一时刻单元状态的权重矩阵,表示遗忘门相对于前一时刻单元状态的权重矩阵,表示输出门相对于前一时刻单元状态的权重矩阵;表述模块的最终输出。
18、所述深度学习训练步骤还包括将lstm处理后的数据导入到cnn组件中,并从中提取特征,所述cnn的数学模型用以下函数表示:
19、
20、
21、
22、其中,为卷积结果,和为卷积过程中的参数,表示卷积核和偏置;和是池化进程的简单表达式。
23、所述深度学习训练步骤中yolov5算法采用了ciou_loss函数,所述ciou_loss函数的及计算方法为:
24、ciou_loss=1-ciou=1-(iou-)
25、v=
26、其中,iou(intersection over union)用于衡量两个边界框(通常是矩形框)之间的重叠程度。它通过计算两个边界框相交区域的面积除以两个边界框并集的面积来确定其重叠程度。ciou(complete iou)是一种iou(intersection over union,交并比)的改进版本。它不仅考虑了目标框之间的重叠程度,还考虑了它们的中心点距离和尺寸的差异。iou的取值范围在0到1之间,其中0表示两个边界框没有重叠,1表示两个边界框完全重叠。当iou大于设定的阈值时,通常将其认为是一次正确的检测或匹配。distance_c表示一个用于惩罚框中心点距离的系数。distance_2表示预测框和真实框的两个中心点之间的欧式距离。表示一个用于惩罚框的宽高比的项。、、、分别表示预测框和真实框的宽度和高度。
27、本方案的有益效果为:lstm与cnn用于处理时间序列数据,如车辆行驶过程中的速度、加速度、轨迹、转向角等。yolov5主要用来处理图像数据,如驾驶员图像、行人图像等,能够准确地识别和定位驾驶过程中的关键目标。通过组合使用lstm、cnn和yolov5,能够准确地评估出驾驶员的行为。
28、所述行为评价步骤中,包括根据不同的评分指标和权重,对驾驶员的行为进行综合评价。
29、本方案的有益效果为:在行为评价步骤中,通过多指标、多维度的评价方式,不仅能更全面、更准确地反映驾驶员的驾驶行为和技能水平,而且能根据不同的评分指标和权重,突出关键的驾驶行为,能够及时发现驾驶问题,防止交通事故。
- 还没有人留言评论。精彩留言会获得点赞!