合成孔径雷达图像自聚焦方法、装置及设备
本发明涉及雷达图像处理,更具体地涉及一种合成孔径雷达图像自聚焦方法、装置及设备。
背景技术:
1、随着合成孔径雷达被广泛的应用于军事侦察、地形测绘、环境监测等众多领域,雷达图像的成像质量也越来越重要。由于气流扰动、人工操作、合成孔径雷达(syntheticaperture radar,sar)平台运动等影响因素,导致合成孔径雷达出现相位误差,使最终呈现出的图像出现像素点偏移,影响成像质量。现有技术解决雷达图像的成像质量往往是通过多次迭代,实现消除误差的影响。
2、在实现上述发明构思的过程中,发明人发现:相关技术中由于合成孔径雷达在被外界干扰的情况下,导致图像中的像素点发生偏移,进而使图像发生畸变,利用多次迭代处理雷达图像效率低,且处理后的雷达图像仍有较大误差的技术问题。
技术实现思路
1、鉴于上述问题,本发明提供了合成孔径雷达图像自聚焦方法、装置及设备。
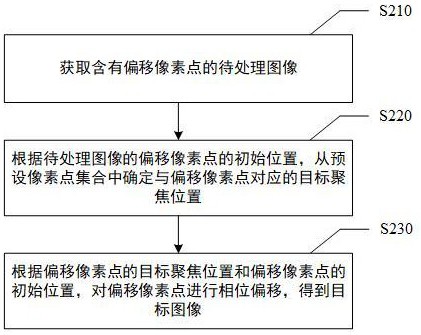
2、根据本发明的第一个方面,提供了一种合成孔径雷达图像自聚焦方法,包括:获取含有偏移像素点的待处理图像,其中,偏移像素点是由于合成孔径雷达在受到外界干扰的情况下,使初始像素点的位置产生偏移得到的;根据待处理图像的偏移像素点的初始位置,从预设像素点集合中确定与偏移像素点对应的目标聚焦位置,其中,预设像素点集合中包括与偏移像素点距离预设步长的区域内的多个预设像素点;根据偏移像素点的目标聚焦位置和偏移像素点的初始位置,对偏移像素点进行相位偏移,得到目标图像。
3、根据本发明的实施例其中,待处理图像中包括s个偏移像素点,s为大于1的正整数;根据待处理图像的偏移像素点的初始位置,从预设像素点集合中确定与偏移像素点对应的目标聚焦位置,包括:根据每一个偏移像素点的位置参数和合成孔径雷达参数,得到每一个偏移像素点的偏移时刻,根据每一个预设像素点的位置参数和合成孔径雷达参数,得到每一个预设像素点的偏移时刻;根据第s个偏移像素点的偏移时刻和与第s个偏移像素点对应的第m个第一目标像素点的偏移时刻,得到第s个偏移像素点的偏移时长,其中,第一目标像素点表征为与第s个偏移像素点对应的预设像素点,第一目标像素点包括m个,m为大于1的整数,m为小于等于m的正整数,s为小于s的正整数;根据第s+1个偏移像素点的偏移时刻和与第s+1个偏移像素点对应的第k个第二目标像素点的偏移时刻,得到第s+1个偏移像素点的偏移时长,其中,第二目标像素点表征为与第s+1个偏移像素点对应的预设像素点,第二目标像素点包括k个,k为大于1的整数,k为小于等于k的正整数,s+1为小于等于s的正整数;根据第s个偏移像素点的偏移时长和第s+1个偏移像素点的偏移时长,得到偏移误差;在偏移误差满足第一预定条件的情况下,将第m个第一目标像素点的位置确定为第s个偏移像素点的目标聚焦位置,将第k个第二目标像素点的位置确定为第s+1个偏移像素点的目标聚焦位置。
4、根据本发明的实施例,针对第s个偏移像素点的偏移时刻与第一预设像素点集合中的每一个预设像素点的偏移时刻,得到与第一预设像素点集合中的每一个预设像素点对应的第一偏移时长,其中,第一预设像素点集合表征与第s个偏移像素点对应的预设像素点集合;针对第s+1个偏移像素点的偏移时刻与第二预设像素点集合中的每一个预设像素点的偏移时刻,得到与第二预设像素点集合中的每一个预设像素点对应的第二偏移时长,其中,第二预设像素点集合表征与第s+1个偏移像素点对应的预设像素点集合;根据i个第一偏移时长和j个第二偏移时长,得到第二偏移误差,其中,i和j均为正整数;在第二偏移误差满足第二预定条件的情况下,从第一预设像素点集合中确定与第s个偏移像素点对应的第一目标像素点集合,从第二预设像素点集合中确定与第s+1个偏移像素点对应的第二目标像素点集合。
5、根据本发明的实施例,根据偏移像素点的目标聚焦位置和偏移像素点的初始位置,对偏移像素点进行相位偏移,得到目标图像,包括:根据第s+1个偏移像素点的初始位置和第一目标聚焦位置,得到与第s+1个偏移像素点对应的第一相位误差梯度,其中,第一目标聚焦位置表征根据第s个偏移像素点的初始位置和第s+1个偏移像素点的初始位置,得到的与第s+1个偏移像素点对应的目标聚焦位置;根据第s+1个偏移像素点的初始位置和第二目标聚焦位置,得到与第s+1个偏移像素点对应的第二相位误差梯度,其中,第二目标聚焦位置表征根据第s+1个偏移像素点的初始位置和第s+2个偏移像素点的初始位置,得到的与第s+1个偏移像素点对应的目标聚焦位置;根据第一相位误差梯度和第二相位误差梯度,得到第s+1个偏移像素点对应的目标相位误差梯度;根据目标相位误差梯度,得到目标相位误差;根据目标相位误差,对偏移像素点进行相位偏移,得到目标图像。
6、根据本发明的实施例,根据第s+1个偏移像素点的位置和第一目标聚焦位置,得到与第s+1个偏移像素点对应的第一相位误差梯度,包括:根据第s+1个偏移像素点的初始位置和第s+1个偏移像素点的偏移时刻,得到第一线性调频信号;根据第一目标聚焦位置和第一目标聚焦位置对应的预设像素点的偏移时刻,得到第二线性调频信号;根据第一线性调频信号和第二线性调频信号,得到第一相位误差;根据第一相位误差,得到第一相位误差梯度。
7、根据本发明的实施例,根据偏移像素点中第s+1个偏移像素点前的所有偏移像素点的目标偏移误差,对目标相位误差梯度进行补偿,得到更新的目标相位误差梯度。
8、根据本发明的实施例,根据与偏移像素点对应的目标聚焦位置,调整偏移像素点的初始位置,得到偏移像素点目标初始位置,其中,与目标初始位置对应的偏移时刻与目标聚焦位置对应的偏移时刻之间的差值小于预定阈值。
9、根据本发明的实施例,利用二维检测处理待处理图像的偏移像素点,确定多个候选偏移像素点;按照多个候选偏移像素点质量,对多个候选偏移像素点进行排序,得到排序结果;根据排序结果、多个候选偏移像素点和预定位次阈值,得到筛选后含有偏移像素点的待处理图像。
10、本发明的第二方面提供了一种合成孔径雷达图像自聚焦装置,包括:获取模块,用于获取含有偏移像素点的待处理图像,其中,偏移像素点是由于合成孔径雷达在受到外界干扰的情况下,使初始像素点的位置产生偏移得到的;确定模块,用于根据待处理图像的偏移像素点的初始位置,从预设像素点集合中确定与偏移像素点对应的目标聚焦位置,其中,预设像素点集合中包括与偏移像素点距离预设步长的区域内的多个预设像素点;偏移模块,用于根据偏移像素点的目标聚焦位置和偏移像素点的初始位置,对偏移像素点进行相位偏移,得到目标图像。
11、本发明的第三方面提供了一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序,其中,当一个或多个程序被一个或多个处理器执行时,使得一个或多个处理器执行上述方法。
12、本发明的第四方面还提供了一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行上述方法。
13、根据本发明的合成孔径雷达图像自聚焦方法、装置及设备,由于获取了含有偏移像素点的待处理图像,根据待处理图像中的偏移像素点的初始位置和预设步长,遍历偏移像素点周围的所有的预设点,将遍历范围内的所有预设点构成预设像素点集合,再根据待处理图像中的偏移像素点的初始位置,从预设像素点结合中确定与偏移像素点对应的目标聚焦位置,根据偏移像素点对应的目标聚焦位置和偏移像素点的初始位置,对偏移像素点进行相位偏移,得到目标图像,实现了对待处理图像中的偏移像素点的初始位置进行相位偏移,使相位偏移后的偏移像素点的位置能够最大程度的靠近目标聚焦位置或者位于目标聚焦位置,避免因像素点偏移导致图像发生畸变,提高了待处理图像中偏移像素点的自聚焦的能力和图像的成像质量,并且,由于对偏移像素点进行相位偏移是根据偏移像素点的目标聚焦位置和偏移像素点的初始位置共同得到的,因此,提高了对偏移像素点进行的相位偏移的准确性,以及,根据预设步长遍历偏移像素点附近的所有预设点,扩大了预设像素点集合中的预设像素点的多样性,避免遗漏预设像素点,提高确定目标聚焦位置的精度。
- 还没有人留言评论。精彩留言会获得点赞!