一种基于Mworks的船舶路径跟踪控制仿真系统及方法
本发明涉及一种基于mworks的船舶路径跟踪控制仿真系统及方法,属于船舶路径跟踪控制仿真。
背景技术:
1、随着船舶技术的不断进步和全球航运需求的增加,海上交通越来越密集,为保障航行安全,人们对船舶的运动控制提出了更高的要求。在远洋航行时,为了减轻舵手的工作强度、缩短航行距离以及减少燃料的消耗,必须精准地控制船舶的航向或航迹。同时,针对于一些特种作业,对航向的精准度提出了更严格的要求。因此,对船舶航路径跟踪与航向控制进行研究在理论和实际上都具有重要意义。船舶路径跟踪控制是实现船舶自主导航和安全航行中的关键因素。
2、由于实验成本较高,建立仿真系统是一种常用的技术途径,可以有效压缩时间,降低成本。目前与本发明相关的专利主要包括:1)“基于改进los引导算法的船舶航迹控制方法”(cn106950955a),该发明根据船舶导航模块得到船舶实时的实际航迹信息;若实际轨迹与规划路径之间的偏差超出可接受偏差,则通过改进的los引导算法计算得到期望航向,直至航迹偏差在可接受范围内,与本发明采用的技术路线不同。2)“一种船舶航向跟踪控制的方法”(cn112068550a),该发明提出一种船舶航向跟踪控制方法,根据船舶自身状态信息和目标位置并通过los导航算法来生成目标路径和目标首向,与本发明控制方法不同。3)“新型的超大型欠驱动船舶路径跟踪预测los制导方法”(cn116859933a),该发明提出了一种新兴的超大型欠驱动船舶路径跟踪预测los制导方法,与本发明面向对象显著不同。
技术实现思路
1、本发明为了解决现有技术存在的问题,提出了一种基于mworks的船舶路径跟踪控制仿真系统及方法。
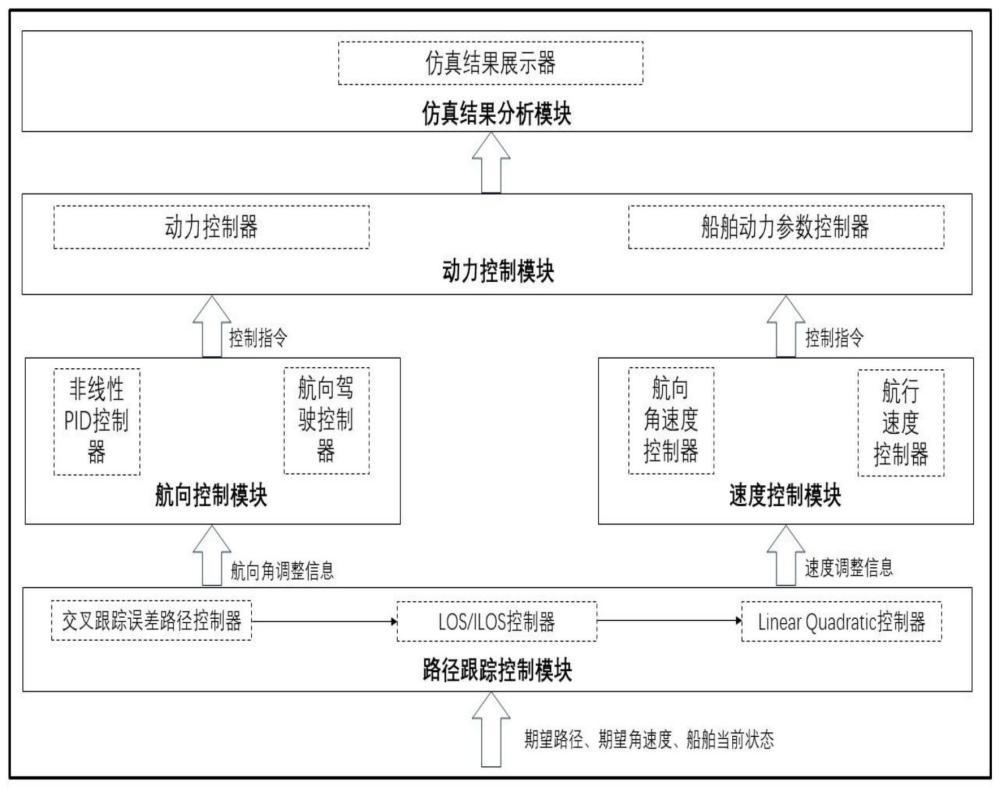
2、一种基于mworks的船舶路径跟踪控制仿真系统,所述基于mworks的船舶路径跟踪控制仿真系统包括路径跟踪控制模块、航向控制模块、速度控制模块和动力控制模块,所述路径跟踪控制模块与航向控制模块和速度控制模块连接,所述航向控制模块和速度控制模块与动力控制模块连接。
3、进一步的,所述路径跟踪控制模块,用于获取船舶位置信息,并输出航向角调整信息和速度调整信息;
4、所述航向控制模块,用于接收所述航向角调整信息,得到航向误差计算并输出相应的舵角或舵机控制指令;
5、所述速度控制模块,用于接收所述速度调整信息,并输出相应的转向角速度和船舶速度控制指令;
6、所述动力控制模块,用于接收所述航向控制模块和速度控制模块输出的舵角或舵机控制指令与转向角速度和船舶速度控制指令,并将指令信号转化为实际的推动力,从而调整船舶的运动状态。
7、进一步的,所述路径跟踪控制模块,包括交叉跟踪误差路径控制器、los/ilos控制器和linear quadratic控制器,所述交叉跟踪误差路径控制器、los/ilos控制器和linearquadratic控制器依次连接,其中,
8、所述交叉跟踪误差路径控制器,用于计算当前船舶与期望路径的交叉跟踪误差,并将船舶与期望路径的交叉跟踪误差信息发送至所述los/ilos控制器;
9、所述los/ilos控制器,用于基于所述当前船舶与期望路径的交叉跟踪误差,转换为控制信息;
10、所述linear quadratic控制器,用于微调和校正船舶的航向角,以优化所述控制信息。
11、进一步的,所述航向控制模块包括非线性pid控制器和航向驾驶控制器,其中,
12、所述非线性pid控制器,用于采用动态增益调节策略,根据系统状态和需求动态地调整比例增益和积分增益;
13、所述航向驾驶控制器,用于根据误差信号来控制舵机的转动角度,将转动角度转化为舵角,然后将相应的舵角或舵机控制指令传递给动力控制模块。
14、进一步的,所述速度控制模块包括航向角速度控制器和航行速度控制器,其中,
15、所述航向角速度控制器,用于调节船舶的转向速度,实现期望的航向角变化和船舶姿态的稳定,同时实时监测航向角速度变化,将信息反馈给路径跟踪控制模块,形成闭环反馈机制;
16、所述航行速度控制器,用于控制船舶的速度以实现期望的航行速度,从路径跟踪控制模块获取期望的航行速度,将调整信息传递给船舶动力控制模块。
17、一种基于mworks的船舶路径跟踪控制仿真方法,基于上述的一种基于mworks的船舶路径跟踪控制仿真系统,所述基于mworks的船舶路径跟踪控制仿真方法包括以下步骤:
18、s100、获取船舶当前状态参数,所述状态参数包括速度、位置和角速度,并获取预先设定的期望路径和期望速度以及目标点;
19、s200、使用交叉跟踪误差路径控制器计算当前船舶与期望路径的交叉跟踪误差,根据交叉跟踪误差路径控制器的输出指令,调整路径跟踪控制模块的输出指令,使船舶沿着期望轨迹行驶;
20、s300、使用los/ilos控制器智能切换导引算法计算输出控制指令,以调整船舶的航向角速度和船舶姿态的稳定;
21、s400、使用速度控制模块接收路径跟踪控制模块输出的速度调整信息,以控制船舶的速度;
22、s500、使用动力控制模块接收航向控制模块和速度控制模块输出的控制指令,并将指令信号转化为实际的推动力,调整船舶的运动状态;
23、s600、使用仿真结果分析模块模拟显示船舶的运动状态。
24、进一步的,在s200中,基于航路点的交叉跟踪误差路径计算包括以下步骤:
25、步骤210、首先通获取船舶当前的位置和航向,以及下一个目标航路点的位置信息;
26、步骤220、确定船舶的实际航迹与目标航路点之间的最短距离;
27、步骤230、通过导航设备获取船舶位置及航向角,并根据预先设定的目标航点,计算出交叉跟踪误差,设两个航点的经纬度坐标为(x1,y1)和(x2,y2),以及船舶当前位置的经纬度坐标(x,y),函数返回横向距离ye即为交叉跟踪误差,以北东地坐标系表示:
28、ye=-(x-x1)*sin(pip)+(y-y1)*cos(pip),其中,pip为航迹方向角,即路径相对于正北方向的角度;
29、步骤240、控制船舶速度和转向速率,调整船舶的行驶轨迹,使得船舶尽快到达目标航路点,并按照预设的航线行驶。
30、进一步的,在s300中,包括以下步骤:
31、s310、获取两个及以上目标航路点,根据航行情况及船舶任务类型选择los/ilos算法,若为直线航点等简单任务,选择los算法;若为高速和弯曲路径任务,选择ilos算法,其中,所述高速和弯曲路径任务包括掉头、窄弯航点和急转弯航点;
32、s320、选择适当的预测点并据此调整航向角状态,实现更平滑的路径跟踪,采用预测点选择策略,以提前预测船舶未来的位置,其中,los算法和ilos算法的预测点选择不同:
33、los算法中,预测点选择目标点沿着期望路径的一定距离前方的点;ilos算法中,预测点针对三自由度的船舶模型,基于船体的动力学模型和运动信息进行运动计算,同时,本系统采取最近预测点优先选取的策略,以提高系统路径跟踪精度、适应速度变化;
34、s330、根据不同的航行条件和环境要求,调整指令输出的速度,以避免过快导致的系统震荡和过慢导致的系统响应迟缓。
35、进一步的,在s320中,
36、ilos的具体算法包括以下步骤:
37、s321、根据目标点在平面直角坐标系中的坐标(xt,yt),期望路径方向θd,船舶的位置(x,y),计算出目标点到期望路径的偏差ε,目标点和船舶之间的距离r:
38、ε=(xt-x)*sin(θd)-(yt-y)*cos(θd)
39、r=sqrt((xt-x)2+(yt-y)2);
40、s322、计算视线误差γ:
41、s323、根据实现误差γ计算出需要调整的舵角δ和推力t:
42、δ=kp*γ+kd*(γ-γlast)
43、t=kv*(vd-v)
44、其中kp和kd是比例和微分控制器的增益,γlast是上一次计算的视线误差,kv是速度控制器的增益;
45、s324、根据船舶在北东地坐标系下距离误差ye和航向角chi,计算横向误差速度dye和横向积分误差速度dyint:
46、dye=u*sin(chi-pip)
47、
48、其中,pip为路径切线角与北轴的夹角,u为船舶速度,delta为正的前瞻距离,用于控制航迹偏差的大小,kappa为正的积分增益常数,yint为垂线距离的积分误差,用于消除偏差积累;
49、s325、计算航向角chid和航向角变化率并通过传出参数的方式返回:
50、chid=πp-artan(kp*ye+ki*yint)
51、
52、其中比例和积分增益参数ki=kappa*kp。
53、一种存储介质,该存储介质上储存有计算机程序,所述计算机程序被处理器执行时实现上述的一种基于mworks的船舶路径跟踪控制仿真方法。
54、本发明的有益效果:1)能够实现船舶在给定路径上的精确跟踪和稳定航行;2)能够适应不同的航行场景和操作要求。
- 还没有人留言评论。精彩留言会获得点赞!