基于高斯过程回归的三维点云高密度重建方法及相关装置
本申请属于激光雷达技术,涉及一种基于高斯过程回归的三维点云高密度重建方法及相关装置。
背景技术:
1、激光雷达,也称为lidar,是光学雷达的一种。它通过向目标发射激光并接收反射回来的信号来测量目标的距离、速度、振动状态等信息。随着科技的进步,激光雷达已经广泛应用于多个领域,包括地形测绘、大气物理研究、环境科学、天文观测以及无人驾驶汽车等。
2、在过去的几十年中,随着激光技术和计算能力的迅猛发展,激光雷达的分辨率和测量速度都得到了极大的提高。多种类型的激光雷达,如固定波长、调制波长、脉冲和相位差激光雷达等,都在特定的应用中展现出各自的优势。
3、尽管现代的激光雷达在测量精度和范围上都展现出卓越的性能,但其高昂的成本仍然是一个亟待解决的挑战。此外,环境因素如雨、雾和尘埃也可能影响激光雷达的测量效果。为了克服这些挑战,研究者们正在积极探索新的激光源、探测器技术以及先进的信号处理方法。
4、激光雷达技术,尤其是入门级或低成本的设备,虽然为众多应用领域提供了许多便利,但其仍面临一些技术和实际的挑战。具体来说,这些设备在数据的精确度和测量范围上往往受到明显的制约。例如,当面对复杂的地形或远距离的目标时,低成本激光雷达可能无法提供满足需求的数据质量和完整性。
5、更进一步,这些设备对于各种环境因素也显得尤为敏感。恶劣的天气条件,如暴雨、大雪或浓雾,会对激光雷达的数据采集效果造成严重干扰,进而影响其在实际应用中的性能。
技术实现思路
1、本申请的目的在于解决现有技术中的问题,提供一种基于高斯过程回归的三维点云高密度重建方法及相关装置
2、为了实现上述目的,本申请采用以下技术方案予以实现:
3、本申请的创新点之一在于:
4、采用高斯过程对三维点云数据的纵向点云进行高密度重建处理,提升纵向稀疏点云的密度的同时,不增加水平方向点云,在增加一定点云数量完成高精度建图定位的同时,避免点云数据过大导致实时运算困难。
5、本申请的创新点之二在于:
6、利用区域生长法针对点云进行纵向线特征进行判断,打断不同属于一个物体的纵向点云,在同一物体的纵向进行增点处理。具体的:
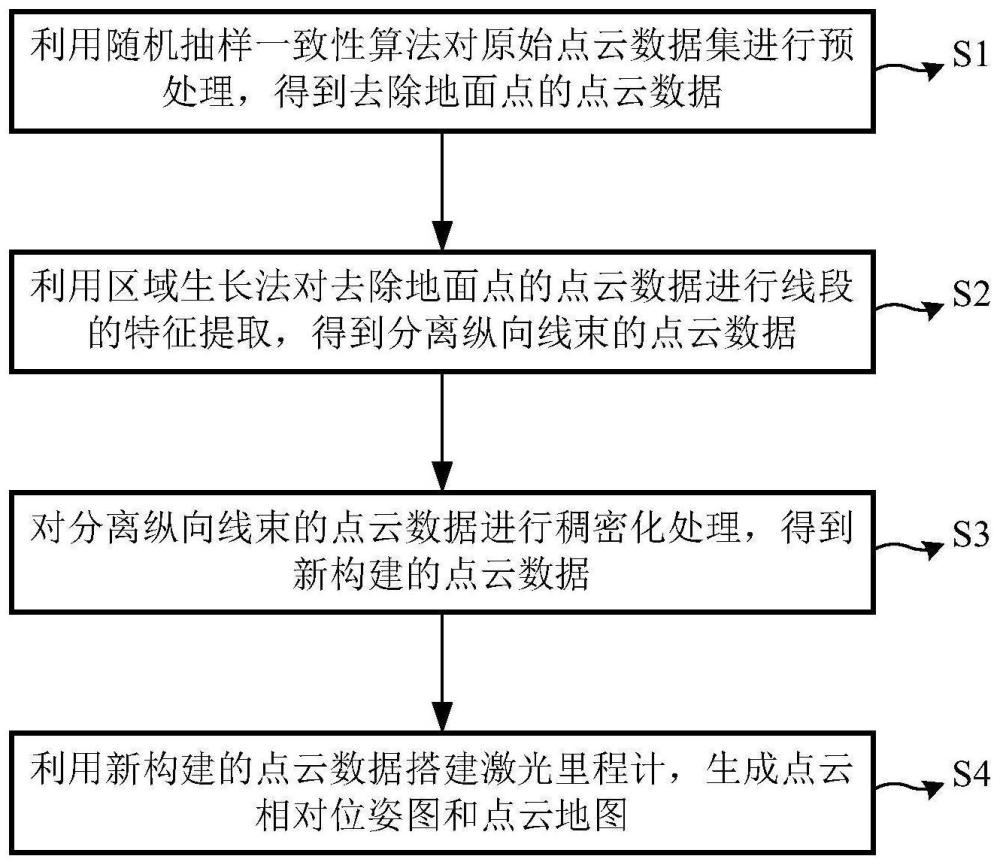
7、第一方面,本发明提供一种基于高斯过程回归的三维点云高密度重建方法,包括以下步骤:
8、利用随机抽样一致性算法对原始点云数据集进行预处理,得到去除地面点的点云数据;
9、利用区域生长法对去除地面点的点云数据进行线段的特征提取,得到分离纵向线束的点云数据;
10、对分离纵向线束的点云数据进行稠密化处理,得到新构建的点云数据;
11、利用新构建的点云数据搭建激光里程计,生成点云相对位姿图和点云地图。
12、第二方面,本发明提供一种基于高斯过程回归的三维点云高密度重建系统,包括:
13、预处理模块,用于利用随机抽样一致性算法对原始点云数据集进行预处理,得到去除地面点的点云数据;
14、特征提取模块,用于利用区域生长法对去除地面点的点云数据进行线段的特征提取,得到分离纵向线束的点云数据;
15、稠密化处理模块,用于对分离纵向线束的点云数据进行稠密化处理,得到新构建的点云数据;
16、激光里程计搭建模块,用于利用新构建的点云数据搭建激光里程计,生成点云相对位姿图和点云地图。
17、第三方面,本发明提供一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述方法的步骤。
18、第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述方法的步骤。
19、与现有技术相比,本申请具有以下有益效果:
20、针对现有技术,本申请着重探讨了如何通过高斯过程对低成本16线激光雷达采集的稀疏数据进行高密度重建。这种基于高斯过程的算法不仅可以有效增强点云数据的密度,还可大幅提高其准确度,使其更适合于高精度应用需求。16线激光雷达扫描范围大致在以激光雷达水平高度上下15’的垂直范围,当场景距离激光雷达100米时,垂直范围的相邻点误差在1.1米,场景距离激光雷达200米时,垂直相邻点误差在2.2米,距离越远,激光点云越稀疏。但是水平方向点云的疏密取决于激光雷达的水平角度分辨率,低分辨率情况下,水平点云密集。为了解决远距离扫描情况下,纵向稀疏点云造成的地图重建误差大,定位不精准的问题,提出了基于高斯过程的三维稀疏点云高密度重建的方法。通过对点云进行预处理、纵向的线特征分割、纵向的高斯过程处理,以达到丰富纵向的稀疏点云密度的效果,突破稀疏点云激光slam(simultaneous localization and mapping同步定位与地图创建)高精度定位与建图关键技术,完成高效精确的扫描匹配与建图任务,实现更高精度的导航与避障。
技术特征:
1.基于高斯过程回归的三维点云高密度重建方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于高斯过程回归的三维点云高密度重建方法,其特征在于,所述利用随机抽样一致性算法对原始点云数据进行预处理,包括:
3.根据权利要求2所述的基于高斯过程回归的三维点云高密度重建方法,其特征在于,所述随机抽样一致性算法,包括以下步骤:
4.根据权利要求3所述的基于高斯过程回归的三维点云高密度重建方法,其特征在于,所述平面方程为空间中所有处于同一平面的点所对应的方程,具体如下:
5.根据权利要求1所述的基于高斯过程回归的三维点云高密度重建方法,其特征在于,所述利用区域生长法对去除地面点的点云数据进行线段的特征提取,包括:
6.根据权利要求1所述的基于高斯过程回归的三维点云高密度重建方法,其特征在于,所述对分离纵向线束的点云数据进行稠密化处理,包括:
7.根据权利要求6所述的基于高斯过程回归的三维点云高密度重建方法,其特征在于,所述高斯过程回归方法是在高斯过程的基础上,对于给定的输入点,找到其对应的输出值,即做预测;
8.基于高斯过程回归的三维点云高密度重建系统,其特征在于,包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述方法的步骤。
技术总结
本申请公开了一种基于高斯过程回归的三维点云高密度重建方法及相关装置,包括:利用随机抽样一致性算法对原始点云数据集进行预处理,得到去除地面点的点云数据;利用区域生长法对去除地面点的点云数据进行线段的特征提取,得到分离纵向线束的点云数据;对分离纵向线束的点云数据进行稠密化处理,得到新构建的点云数据;利用新构建的点云数据搭建激光里程计,生成点云相对位姿图和点云地图。通过对点云进行预处理、纵向的线特征分割、纵向的高斯过程处理,以达到丰富纵向的稀疏点云密度的效果,突破稀疏点云激光高精度定位与建图关键技术,完成高效精确的扫描匹配与建图任务,实现更高精度的导航与避障。
技术研发人员:孙剑,胡思敏
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!