违章建筑的检测方法,违章建筑的检测装置及存储介质与流程
本发明涉及建筑识别领域,尤其涉及违章建筑的检测方法,违章建筑的检测装置及存储介质。
背景技术:
1、彩钢瓦类建筑是违章建筑的主要形式之一,由于彩钢瓦类建筑搭建方便、容易安装且成本较低,被广泛用于厂房仓库、建设施工现场临时性用房及农牧渔用简易用房。而在恶劣天气下,此类违章建筑容易引发安全事故。
2、在相关的对彩钢瓦房进行检测的技术方案中,通常是将通过人工巡检的方式进行处理。然而,当前检测方式需要投入巨大的人力,且存在效率低下及消息滞后的缺陷,导致彩钢瓦房检测效率低下。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种违章建筑的检测方法,违章建筑的检测装置及存储介质,解决现有技术中彩钢瓦房检测效率低的问题。
2、为实现上述目的,本发明提供一种违章建筑的检测方法,所述方法包括以下步骤:
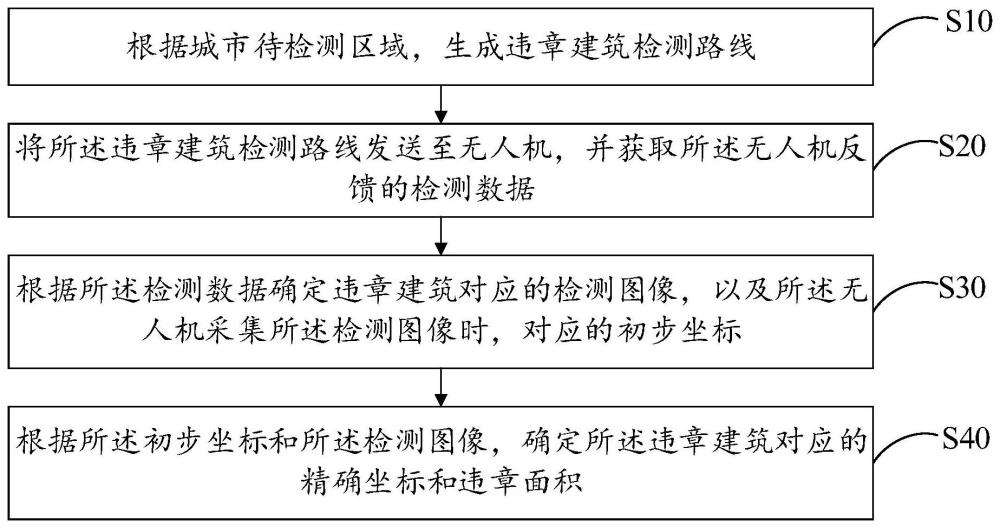
3、根据城市待检测区域,生成违章建筑检测路线;
4、将所述违章建筑检测路线发送至无人机,并获取所述无人机反馈的检测数据;
5、根据所述检测数据确定违章建筑对应的检测图像,以及所述无人机采集所述检测图像时,对应的初步坐标;
6、根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积。
7、可选地,所述根据所述检测数据确定违章建筑对应的检测图像,以及所述无人机采集所述检测图像时,对应的初步坐标的步骤包括:
8、基于预设检测分割模型对所述检测数据中的检测视频进行检测分割处理,得到所述检测图像,并确定所述检测图像在时域上对应的检测时间;
9、获取所述无人机在时域上的位置变化信息,并根据所述检测时间确定所述无人机的目标位置;
10、根据所述违章建筑检测路线对应的初始位置的坐标信息,确定所述目标位置对应的所述初步坐标。
11、可选地,所述根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积的步骤包括:
12、确定所述违章建筑在所述检测图像中对应的边界框,以及所述边界框对应的掩膜信息,所述边界框用于分割所述检测图像的违章建筑及正常建筑;
13、确定所述掩膜信息对应的像素面积,并根据所述检测图像的像素尺寸,生成所述检测图像中,所述违章建筑对应的违章面积;
14、确定所述边界框在所述检测图像中的像素坐标,并根据所述像素坐标以及所述初步坐标确定所述精确坐标。
15、可选地,所述确定所述边界框在所述检测图像中的像素坐标,并根据所述像素坐标以及所述初步坐标确定所述精确坐标的步骤包括:
16、确定所述边界框的中心点在所述检测图像中的所述像素坐标,并获取所述无人机的内参矩阵、旋转矩阵以及所述无人机的高度信息;
17、确定所述内参矩阵的第一逆矩阵、所述旋转矩阵的第二逆矩阵以及所述高度信息与所述像素坐标的乘积;
18、将所述乘积对应的坐标与所述初步坐标相加,得到所述精确坐标。
19、可选地,所述根据城市待检测区域,生成违章建筑检测路线的步骤之前,还包括:
20、获取预训练数据集,并基于预设像素大小对所述预训练数据集进行分割处理;
21、根据所述预训练数据集对应的地址信息,将分割处理后的所述预训练数据集划分为训练集和测试集;
22、标注所述训练集的位置信息以及类别名称,并将所述训练集转换为coco数据集;
23、基于所述coco数据集对预训练的目标检测模型进行训练迭代处理,以及根据所述测试集对所述目标检测模型进行测试处理;
24、在所述训练迭代处理的损失值趋于所述测试处理的损失值时,完成所述目标检测模型的训练,并将训练完成后的所述目标检测模型作为所述预设检测分割模型。
25、可选地,所述根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积的步骤之后,还包括:
26、接收到所述精确坐标的导航路线请求时,生成所述精确坐标在地图数据的api调用请求;
27、响应所述api调用请求反馈的地图信息,确定所述精确坐标在所述地图信息中对应的街道信息;
28、根据所述街道信息以及所述导航路线请求对应的起点位置,生成各个所述违章建筑对应的导航路线。
29、可选地,所述根据城市待检测区域,生成违章建筑检测路线的步骤之前,还包括:
30、生成所述待检测区域对应的城市巡检任务;
31、基于所述巡检任务设定航拍参数,根据所述航拍参数在无人机平台中选定所述无人机,并控制所述无人机执行所述城市巡检任务;
32、获取所述无人机执行所述城市巡检任务时,在所述待检测区域采集到的多张图像信息,并基于所述图像信息生成所述城市待检测区域。
33、可选地,所述根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积的步骤之后,还包括:
34、获取本地或云端存储的违章面积比对表,并基于所述违章面积比对表至少执行以下其中一个步骤:
35、生成新的所述违章建筑检测路线,并基于新的所述违章建筑检测路线执行所述将所述违章建筑检测路线发送至无人机,并获取所述无人机反馈的检测数据的步骤;或者
36、获取所述精确坐标对应的街道信息,并基于所述违章建筑检测路线对应的起飞点,生成所述起飞点到所述街道信息的导航路径。
37、此外,为实现上述目的,本发明还提供一种违章建筑的检测装置,所述违章建筑的检测装置包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的违章建筑的检测程序,所述违章建筑的检测程序被所述处理器执行时实现如上所述的违章建筑的检测方法的步骤。
38、此外,为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有违章建筑的检测程序,所述违章建筑的检测程序被处理器执行时实现如上所述的违章建筑的检测方法的步骤。
39、本发明实施例提供了违章建筑的检测方法、违章建筑的检测装置及存储介质,根据城市待检测区域,生成违章建筑检测路线,随后将所述违章建筑检测路线发送至无人机,并获取所述无人机反馈的检测数据,接着根据所述检测数据确定违章建筑对应的检测图像,以及所述无人机采集所述检测图像时,对应的初步坐标,最后根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积。可以看出,通过无人机对违章建筑进行检测,无需人工检测,提高检测效率的同时,在检测过程中将检测与分割相结合,进而获取违章建筑的具体街道定位以及违建面积等重要的信息,为专家或执法人员提供更为详细的信息,提高违章建筑的管理效率。
技术特征:
1.一种违章建筑的检测方法,其特征在于,所述违章建筑的检测方法包括:
2.如权利要求1所述的违章建筑的检测方法,其特征在于,所述根据所述检测数据确定违章建筑对应的检测图像,以及所述无人机采集所述检测图像时,对应的初步坐标的步骤包括:
3.如权利要求2所述的违章建筑的检测方法,其特征在于,所述根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积的步骤包括:
4.如权利要求3所述的违章建筑的检测方法,其特征在于,所述确定所述边界框在所述检测图像中的像素坐标,并根据所述像素坐标以及所述初步坐标确定所述精确坐标的步骤包括:
5.如权利要求2所述的违章建筑的检测方法,其特征在于,所述根据城市待检测区域,生成违章建筑检测路线的步骤之前,还包括:
6.如权利要求1-5中任一项所述的违章建筑的检测方法,其特征在于,所述根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积的步骤之后,还包括:
7.如权利要求1所述的违章建筑的检测方法,其特征在于,所述根据城市待检测区域,生成违章建筑检测路线的步骤之前,还包括:
8.如权利要求1所述的违章建筑的检测方法,其特征在于,所述根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积的步骤之后,还包括:
9.一种违章建筑的检测装置,其特征在于,所述违章建筑的检测装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的违章建筑的检测程序,所述违章建筑的检测程序被所述处理器执行时实现如权利要求1至8中任一项所述的违章建筑的检测方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有违章建筑的检测程序,所述违章建筑的检测程序被处理器执行时实现如权利要求1至8中任一项所述的违章建筑的检测方法的步骤。
技术总结
本发明公开了违章建筑的检测方法,违章建筑的检测装置及存储介质,其中,所述方法包括以下步骤:根据城市待检测区域,生成违章建筑检测路线;将所述违章建筑检测路线发送至无人机,并获取所述无人机反馈的检测数据;根据所述检测数据确定违章建筑对应的检测图像,以及所述无人机采集所述检测图像时,对应的初步坐标;根据所述初步坐标和所述检测图像,确定所述违章建筑对应的精确坐标和违章面积。本发明通过将检测与分割相结合,进而获取到违章建筑的精确坐标和违章面积等重要信息,提高违章建筑的管理效率。
技术研发人员:伍永靖邦,郑则行,金楠,岳清瑞,施钟淇,范存君
受保护的技术使用者:深圳市城市公共安全技术研究院有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!