一种用于多源地理高程信息的集成与融合系统及方法与流程
本发明属于地理信息,具体涉及一种用于多源地理高程信息的集成与融合系统及方法。
背景技术:
1、对地观测技术和计算机技术的不断发展,使得地理空间信息的生产效率得到大幅度提高,体量呈爆炸式增长,种类也日益丰富。地理高程信息(后简称高程信息)是一类重要的地理空间信息,它能够描述地物的地形属性特征(包括空间位置特征以及地面高程值),实现对地形表面形态的数字表达,因而在生态、农业、气象以及军事应用等多个领域中得到了广泛的应用。例如,在地形分析和水文分析应用中,利用高程信息中的地形特征能够计算地表径流的流向、汇流累积量、河流网线分支位置和长度等信息;在灾害监测工作中,将高程信息的地形特征和遥感影像的光谱和纹理特征相结合,能够对洪水、山体滑坡等重大自然灾害及其次生灾害及时预警。现如今,单一来源的高程信息已经难以满足日益复杂的应用需求,需要提供一种用于多源地理高程信息的集成与融合方法,充分挖掘不同来源高程信息的互补特性,通过多源地理高程信息的实时融合改善信息服务质量,提高上层业务服务与应用分析的精度。然而,受到观测手段、生成方法等因素的制约,这些高程信息往往在空间分辨率、信息精度、覆盖范围等方面存在差异,这为高程信息的集成与融合方法带来了挑战。
2、现有的高程信息集成与融合方法,虽然在多源地理高程信息的部分应用场景中取得了一定的效果,但在实际的工程环境中时还存在弊端。一方面,这些高程信息集成与融合方法过于简单,即对于存在重叠区域的多源地理高程信息,通过“多选一”的简单方式确定重叠区域的高程值,因而在重叠区边缘可能存在台阶异常,仅适用于信息量大、更新频率低、来源单一的场景。另一方面,现有的高程信息集成与融合方法大多采用离线的批处理方式,各个环节互相独立且需要大量的人工参与,从而导致高程信息集成与融合成本高且实时性差,难以满足多源地理高程信息的高效集成与融合应用要求。
技术实现思路
1、本发明的目的在于提出一种用于多源地理高程信息的集成与融合系统及方法。
2、实现本发明目的的技术解决方案为:一种用于多源地理高程信息的集成与融合系统,包括:
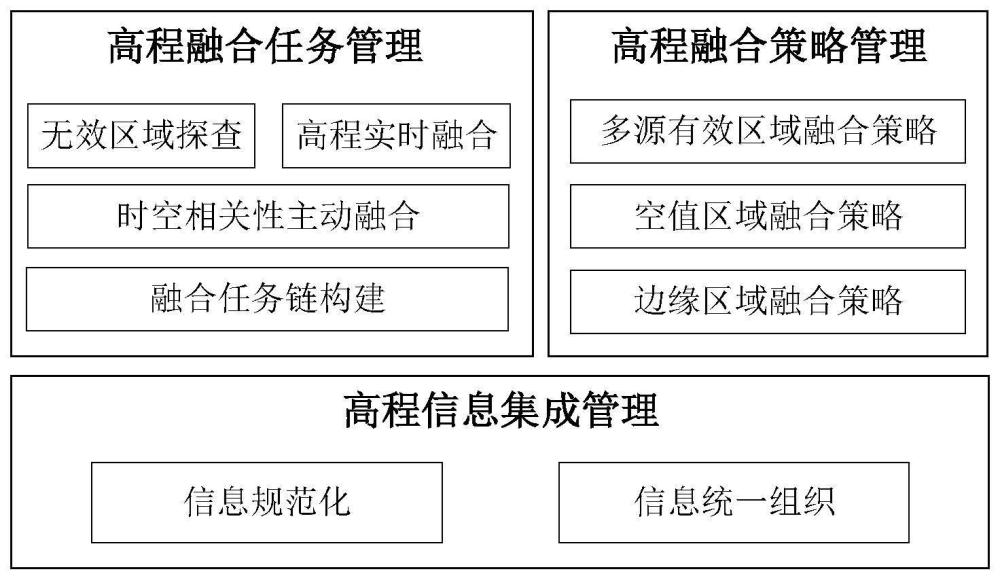
3、高程信息集成管理模块,从信息规范化与信息统一组织两个方面实现多源地理高程信息的管理,为多源高程融合任务管理与策略管理奠定基础。考虑到不同来源高程信息之间的差异,需要对高程信息做规范化处理,将各种高程信息的不同投影转换到同一投影上,保证高程信息在时空基准和信息准确度方面的一致性。多源地理高程信息统一组织,通过建立基于空间金字塔的网格模型,将不同来源的高程信息以网格为单位重新进行组织,形成具有多个分辨率层次的高程金字塔。网格中包含的高程信息,除按栅格结构组织的高程值以外,还包括空间分辨率、空间四至范围、数据生产时间在内的时空信息,以及信息来源、信息质量等级在内的属性信息。高程金字塔中的网格,是高程信息组织的基本单位,也是高程融合的最小单位。
4、高程融合任务管理模块,将完成高程信息融合所需的各个步骤(如无效区域探查、实时融合、主动融合)看作可以封装并独立运行的任务,不同任务通过串联或并联的方式连接在一起,构成一条完整的高程信息融合任务链路(后简称融合任务链)。高程融合任务管理,定义了无效区域探查任务、高程信息实时融合任务和高程信息主动融合任务三类任务,并给出了利用三类任务构建融合任务链的方法。高程信息实时融合任务内部,又包含多源有效区域融合、空值区域融合以及边缘区域融合三种子任务,分别根据高程融合策略管理中包含的三种融合策略执行融合操作。无效区域探查任务,将高程信息内部的无效区域(即无效或异常高程值连接起来构成的联通区域)视作一个或多个联通区域,基于树结构快速识别多源地理高程信息无效区域内的冗余、噪声信息并进行标记。无效区域探查任务输出的具有标记结果的高程信息将作为高程信息实时融合子任务的输入。高程信息实时融合任务,根据标记结果区分高程信息有效区域与无效区域并分析融合场景,选择多源有效区域融合、空值区域融合、边缘区域融合三种子任务中的一种或多种执行融合过程。高程信息主动融合子任务,利用高程信息访问的时空相关性特点,在高程信息实时融合子任务执行结束后,对高程信息实时融合子任务中处理的融合信息进行时空相关性分析,提取与之存在时空相关性的其他已有高程信息放入待融合列表,待融合过程结束后缓存融合结果。融合任务链构建,实现对高程融合过程中所需任务的规范化定义,通过任务标识、任务级别、任务类型完成对任务自身的描述;通过父任务标识、子任务标识、上游任务标识、下游任务标识完成对任务间组合关系、嵌套关系的描述;通过高程信息集合完成对任务输入的高程信息的描述。根据已定义的任务自动构建融合任务链,高程信息按照流的形式在执行过程中前进,依次被任务链中的不同任务进行处理并将处理结果向后传送,最后完成融合流程。
5、高程融合策略管理模块,通过分析多源有效区域、空值区域、边缘区域场景中的高程融合需求,针对不同场景制定融合策略并在高程融合任务管理中统一封装成子任务,保证输入、输出的一致性。高程融合策略管理中定义了三种不同的融合策略,多源有效区域融合策略、空值区域融合策略以及边缘区域融合策略。多源有效区域融合策略,是多来源地理高程信息有效区域的空间相交区域(后简称多源有效区域)内采用的融合策略。在多源有效区域中,需要权衡不同来源高程信息在融合结果中的贡献。每个高程值均由多源高程值加权融合得到,融合中采用的权重可根据高程信息的空间分辨率计算得来。空值区域融合策略,是在某个存在一个或多个来源的高程信息无效区域的范围(后简称空值区域)内采用的融合策略。对于包含无效区域的高程信息,需要根据待填充区域信息的密度、周围信息计算获得的坡度信息综合选择插值方法,采用插值填充的方式替换原无效高程值;然后,将填充后的高程信息与有效区域的高程信息加权融合,得到最终的融合结果。边缘区域融合策略,是对网格边缘范围内采用的融合策略。边缘区域融合,是对网格边缘范围内采用的融合策略,用于消除融合带来的“台阶效应”。由于高程信息融合通常在多源高程信息统一组织的基础上开展,这种统一组织的方式尽管可以保证来自相同高程数据网格的高程连续性,但是在融合过程中可能会加大不同网格边缘高程值之间的差距,出现“台阶效应”。边缘区域融合,通过解析当前高程信息的空间属性,提取其空间八邻域的高程信息,利用高程信息及其邻域高程信息建立边界缓冲区(后简称边缘区域)。采用平滑滤波方式对边缘区域内的高程融合值进行处理,得到修正后的高程融合结果,实现高程信息之间的无缝接边。
6、进一步的,高程信息集成管理模块可以分为信息的规范化处理模块和结构化组织模块两个部分。
7、(1)信息规范化处理模块
8、考虑到不同来源高程信息之间的差异,需要对信息实体做一致化处理,保证多源地理高程信息在时空基准和数值精度方面的一致性,即将各种高程信息的不同投影转换到同一投影上,投影转换的过程中还需要考虑不同坐标系的转换,并将使低精度的高程值表示向高精度的高程值表示统一。考虑到高程信息是按行列有序组织起来的栅格数据,因此对高程信息进行规范化处理应当按像素点逐点计算。以将高程信息统一到utm坐标为例,单个像素点的处理流程如下。其中,(x,y)表示高程信息中像素的行、列坐标,elevationx,y表示高程信息的像素坐标值即高程值,geolocationx,y表示高程信息的地理坐标,utmlocationx,y表示每一景输入信息的utm坐标,pixellocationx,y表示每一景输入信息的像素坐标:
9、f)对于高程信息中任意一个行、列坐标为(x,y)的高程值elevationx,y,计算其对应的地理坐标geolocationx,y;
10、g)将该高程值的地理坐标geolocationx,y转换到utmlocationx,y;
11、h)由utmlocationx,y判断该高程值的位置是否在输入高程信息的空间范围内,在则继续进行步骤d),否则不参与计算;
12、i)计算utm坐标与统一坐标的高程信息中像素行列坐标之间的对应关系,由utmlocationx,y转换到pixellocationx,y;
13、j)循环执行步骤a)至d),直至所有的elevationx,y都处理完毕。处理后未能覆盖的区域用null值填充,null值为可以人为指定的高程无效值,可能的取值包括0、-9999。
14、如需转换到其他坐标系时,可参考以上步骤进行调整。
15、(2)信息结构化组织模块
16、通过建立具有金字塔式结构的多分辨率高程信息网格模型,对高程进行重采样和分层分块处理后拷贝到对应的网格中,形成具有多尺度高程金字塔,并以金字塔中的网格作为高程信息融合的最小单位。网格中包含的高程信息,除按栅格结构组织的高程值以外,还包括空间分辨率、空间四至范围、数据生产时间在内的时空信息,以及信息来源、信息质量等级在内的属性信息。
17、首先,根据高程信息的空间分辨率、地理范围建立信息与网格模型的对应关系,以此为依据,将完成重采样和分层分块处理后的高程信息拷贝到对应的网格中,得到由该高程信息生成的一个高程网格。然后,通过重采样算法(如双线性插值算法)对高程信息进行逐级降采样处理,得到较低分辨率层级下的网格。具有不同分辨率的高程网格组织在一起,得到了与该高程信息相对应的高程金字塔。类似地,可以将这种高程金字塔的构建方式扩展到全球范围。将不同来源的高程信息都经过上述重采样和分层分块处理后,能够在统一的高程信息金字塔层次结构上统一组织在一起,得到全球的高程信息金字塔。
18、进一步的,高程融合任务管理模块包括无效区域探查模块、高程实时融合模块、时空相关性主动融合模块以及融合任务链构建模块四个部分,流程如图2所示。
19、(1)无效区域探查模块
20、无效区域探查时,将高程信息内部的无效区域视作一个或多个联通区域,然后对高程信息的高程沿行、列方向进行搜索;对搜索判定的多个子区域合并成一个完整连接的连通区域;设定区域高程面积阈值,即区域内的无效高程个数,当超过该阈值的连通区域标记为无效区域。无效区域探查的流程如图3所示,具体过程如下。
21、首先,初始化树结构,包括一个一维根节点数组parent和一维树深度数组size,数组大小与高程信息尺寸大小相同,如信息尺寸为256×256像素,则parent和size数组的长度为65536。我们将有效区域、无效区域都看作不同的像素构成的集合。根节点数组parent用于表示每个高程所属的集合,初始时每个高程都独立成为一个集合,即parent中的每个元素的值等于它的索引。树深度数组size用于记录每个集合的大小,初始时每个集合只包含一个元素,因此size中的每个元素初始值为1。当获取的当前高程值为无效值时,通过递归或迭代的方式沿着父节点链一直向上查找,直到找到根节点为止。在查找的过程中将每个经过节点的父节点直接更新为根节点,这样路径上的每个节点都直接连接到根节点,而不再沿着中间节点链接,可以显著减小树的深度,使得以后的查找操作更快。使用相同的查找方式搜索其邻域高程点,并更新根节点数组parent。
22、然后,将得到的无效区域搜索结果合并,并进行无效区域重标记的过程。具体的,利用已经搜索出的每个高程值对应的根节点信息,将所有高程值为无效高程值且根节点相同的元素进行根节点合并。合并时,将秩较小的集合合并到秩较大的集合上,这样有助于防止树的深度过高,从而提高性能。无效区域集合合并之后,更新树深度数组size,找出所有像素个数大于预先设定的无效区域阈值的集合,并将该集合内部所有高程点位高程值标记为无效值。无效区域阈值表示应当被标记为无效区域的连通区域中包含的像素个数,此处我们可以将阈值设置为2,也可以根据实际需求和信息特点进行调整。
23、(2)高程信息实时融合模块
24、高程信息实时融合模块,利用无效区域探查的输出结果中对高程信息有效区域与无效区域的标记,分析融合场景及拟采用的融合策略,选择多源有效区域融合、空值区域融合、边缘区域融合三种融合策略中的一种或多种执行融合过程。这些融合策略可以被封装成子任务,并通过串行或者并行的方式连接在一起,共同完成高程信息的实时融合过程。例如,当无效区域探查结果为空时,说明多源地理高程信息内不存在无效区域,构建的融合任务中仅包含1个多源有效区域动态融合任务和1个边缘区域融合任务;当无效区域探查结果为2个无效区域时,则构建的实时融合任务中包含1个多源有效区域动态融合任务、2个空值区域融合任务和1个边缘区域融合任务。
25、(3)时空相关性主动融合模块
26、若某区域的高程信息被访问,则短时间内其周围的高程信息更有可能被访问。时空相关性主动融合,就是利用这一高程数据访问的时空关联性特点,在高程信息实时融合结束时计算当前被访问的高程信息与其他高程信息之间的时空关联性,启动时空关联性较强的高程信息的融合过程并缓存融合结果。这样可以在这些高程信息被访问时直接从缓存中读取,降低实时融合的计算压力。我们认为,空间距离越近、分辨率越接近的高程信息,时空关联性越强;反之,时空关联性越弱。定义时空相关性计算方法如下:
27、
28、其中,distances(di,dj)表示高程信息di和dj之间的空间距离,可以用两个信息的中心经纬度坐标的欧式距离来表示,或者用两个信息对应的空间填充曲线编码的差值来表示;为高程信息di和dj之间的分辨率距离,resi和resj分别为di和dj的空间分辨率,max(resi,resj)和min(resi,resj)则分别代表二者分辨率的最大值和最小值。βs和βres分别为[0,1]区间内的空间距离衰减因子和分辨率距离衰减因子,默认情况下可设置为0.05,也可根据实际情况自行调节。
29、默认情况下,在对高程信息实时融合时,将自动进行主动融合。提取当前高程信息di的空间位置信息、分辨率信息,计算与信息库中其他高程信息的时空相关性。然后,提取时空相关性满足strelation(di,dj)≥strelation0的所有高程信息dj并放入待融合信息列表,再为其构建实时融合任务链,启动融合过程并缓存结果。strelation0为预先设置的时空相关性阈值,默认情况下设置为1,也可自行调节。
30、(4)融合任务链构建模块
31、融合任务链构建,实现对高程融合过程中所需任务的规范化定义,根据已定义的任务自动构建融合任务链路。高程信息按照流的形式在执行过程中前进,依次被任务链中的不同任务进行处理并将处理结果向后传送,最后完成融合流程。
32、任务的定义包括任务标识(task id)、任务级别(task level)、任务类型(tasktype)、父任务标识(parent task id)、子任务标识(subtask id)、上游任务标识(upstreamtask id)、下游任务标识(downstream task id)、高程信息集合(elevation source set)组成。任务标识为任务的唯一标识,一种可能的生成方式为采用uuid作为任务标识。任务级别分为两级,每一级有不同的任务类型。其中,i级任务对应的任务类型包括:无效区域探查任务(iae task)、高程实时融合任务(rtf task)、时空相关性主动融合任务(stcaf task)三种;ii级任务对应的任务类型包括多源有效区域动态融合子任务(merf task)、空值区域融合子任务(erim task)以及边缘区域融合子任务(erft task),对应于多策略融合算法的各项内容。父任务标识、子任务标识分别用于标识该任务的上一级任务和下一级任务,高程实时融合任务通常存在多个ii级子任务。上游任务标识、下游任务标识分别用于标识该任务的上下游任务,依据该信息能够将多个子任务通过串联、或者并联的方式连接在一起。其中,处理的信息在空间范围上通常存在重叠任务可以通过串联的方式相连接,即前一个任务的输出作为后一个任务的输入;相对地,如果不同任务所处理的信息在空间范围上不存在重叠,则可以通过并联的方式将这些任务连接在一起,即将同一个高程信息的不同范围输入到任务中,并将各任务输出的信息以数值拷贝的方式合并在一起。当一个任务的上游任务标识为空值(null)时,表示该任务为实时融合任务链的起始任务,该任务的输入为实时融合任务链的输入;同样地,当一个任务的下游任务标识为空值(null)时,表示该任务为实时融合任务链的结束任务,该任务的输出为实时融合任务链的输出。信息源集合,代表用于实时融合的所有多源地理高程信息构成的集合,集合中的元素为每个高程信息对应的唯一信息标识。
33、进一步的,高程融合策略管理模块包括多源有效区域融合策略模块、空值区域融合策略模块以及边缘区域融合策略模块三个部分,流程如图5所示。
34、(1)多源有效区域融合策略模块
35、多源有效区域融合策略,是多来源地理高程信息有效区域的空间相交区域(后简称多源有效区域)内采用的融合策略。在多源有效区域中,需要权衡不同来源高程信息在融合结果中的贡献。每个高程值均由多源高程值加权融合得到,融合中采用的权重可根据高程信息的空间分辨率计算得来。
36、首先,为待融合的不同来源高程信息分配融合权重,以平衡各高程信息在融合结果中的贡献。一种可以采用的方式是根据分辨率赋予权重,即认为,分辨率越高的高程信息,其质量越高,信息越精细,应当为其分配更高的权重。以三个高程信息d1、d2和d3为例说明权重计算过程。首先,假设高程信息d1、d2和d3对应的空间分辨率分别为res1、res2和res3,令resmax=max(res1,res2,res3)。接着,计算每个高程信息与最高分辨率resmax之间的分辨率比例ratio,d1、d2和d3对应的分辨率比例分别可以表示为ratio1=res1/resmax,ratio2=res2/resmax,ratio3=res3/resmax。我们使用得到的分辨率比例来定义权重weight,将权重设置为分辨率比例的倒数,以确保较高分辨率的高程信息获得更高的权重。那么,高程信息d1、d2和d3对应的权重分别表示为wright1=ratio1/ratiosum,weight2=ratio2/ratiosum,weight3=ratio3/ratiosum,且有ratiosum=sum(ratio1+ratio2+ratio3)。接下来,将得到的权重weight1、weight2和weight3分别作为高程信息d1、d2和d3融合时的权重,实现对多源地理高程信息按分辨率精度的加权融合。加权融合后的高程值height可以表示为:
37、height=weight1×height1+weight2×height2+weight3×height3,#(2)
38、其中,height1,height2和height3分别表示高程信息d1、d2和d3的高程值。将加权融合后的结果输入到窗口大小为3的均值滤波器中进行平滑处理,最终得到多源有效区域的高程融合结果。
39、(2)空值区域融合策略模块
40、空值区域融合策略,是在某个存在一个或多个来源的高程信息无效区域的范围(后简称空值区域)内采用的融合策略。在空值区域融合中,需要对存在无效区域的高程信息和有效高程信息分别处理后再加权融合。对存在无效区域的高程信息处理时,根据待填充区域信息的密度、周围信息计算获得的坡度信息综合选择插值方法,对其中的无效高程值进行填充。
41、首先,沿填充区域的边界向外扩展10像素形成的区域作为邻域,并统计计算邻域内的高程信息密度,并计算坡度值。如果待填充区域内的高程信息密度足够(例如,有30个以上的有效高程值),则认为用于高程值填充的高程信息量满足需求,可以进一步处理;否则,高程信息量无法满足填充需求,仍将保持该区域内的无效高程值,且不参与后续的高程信息融合和平滑滤波操作。接下来,根据统计结果选择相应的插值方法,用来代替区域内原有的无效高程值。当邻域内的坡度较小(如平均坡度小于5°),则说明该区域内地形变化平缓,可以采用双线性内插法计算待填充区域的高程值。然而,如果待填充区域内的信息密度足够,但坡度较大(例如,平均坡度大于5°,或者待填充区域内存在大于20°的坡度值),代表该区域内地形变化复杂,选择使用克里金插值方法计算待填充区域的高程值。完成插值过程后,再采用与多源有效区域融合策略中类似的方式,将多个插值的高程信息、有效区域高程信息进行加权融合,得到最终的融合结果,确保高程信息融合的准确性和可靠性。
42、(3)边缘区域融合策略模块
43、边缘区域融合策略,是考虑到高程信息边缘区域的特殊性而采用的融合策略,能够解决多源地理高程信息的实时融合作用在高程信息网格上而带来的邻接信息边缘高程值不连续的问题。通过解析当前高程信息的空间属性,提取位于其空间八邻域的高程信息。然后利用高程信息及其邻域高程信息建立网格边界缓冲区(后简称边缘区域)。采用平滑滤波方式对边缘区域内的高程融合值进行处理,得到修正后的高程融合结果,实现网格统一组织的高程信息无缝接边。
44、首先,提取当前高程信息的空间属性,确定其网格的空间位置,提取与该网格在空间维度上邻接的空间八邻域网格内的高程信息,(后简称八邻域高程信息)。接下来,进行网格边界缓冲区的构建。利用高程信息及其八邻域高程信息创建网格边界缓冲区,缓冲区宽度默认为6个像素,也可根据需要自行调节。缓冲区域内像素的高程值由当前高程信息与邻域高程信息共同决定。邻域高程信息及缓冲区示意如图6所示。然后,对缓冲区内的高程信息进行插值与平滑处理。从邻域高程信息中提取缓冲区内的高程值,通过双线性内插法对缓冲区内的高程值进行处理,得到目标信息接边处的插值结果,解决邻域高程信息可能存在的空间维度上的信息不连续问题。采用平滑滤波方式对插值结果进行处理,得到边缘区域融合的最终结果。典型的平滑滤波方式可利用均值滤波器、中值滤波器或高斯滤波器来实现,滤波器窗口大小可以设置为3。图7给出了是融合前后多源地理高程信息的可视化效果对比图,用起伏来表示高程信息的取值。图7中融合前的图像存在缝隙,缝隙的大小与缝隙两侧高程信息的取值相关。这表示原有方法未实现多源高程信息之间数据集成与融合,存在高程信息不连续的情况。融合后的图像不存在缝隙,即表明经本发明能够有效组织高程信息,并实现多源高程信息的集成与融合。
45、一种用于多源地理高程信息的集成与融合方法,基于所述的用于多源地理高程信息的集成与融合系统实现。
46、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实施所述的用于多源地理高程信息的集成与融合方法,实现多源地理高程信息的集成与融合。
47、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实施所述的用于多源地理高程信息的集成与融合方法,实现多源地理高程信息的集成与融合。
48、本发明与现有技术相比,其显著优点为:1)在对多源地理高程信息统一组织的基础上,提供了高程融合任务管理方法,利用无效区域探查结果动态构建融合任务链,并利用高程信息访问的时空相关性特点优化融合流程,提高了多源地理高程信息的融合与访问效率;2)设计了高程融合策略管理方法,针对多源有效区域、空值区域、边缘区域三种不同融合场景设计相应的融合方案,提高了高程信息融合结果的准确度与应用范围;4)基于以上效果,本发明提供了多源地理高程信息集成与融合服务方案,打通了多源地理高程信息从获取到协同应用的快速通道,在工程应用中具有较强的实用价值。
- 还没有人留言评论。精彩留言会获得点赞!