一种机械臂的数值仿真方法、装置、电子设备及存储介质
本发明涉及数据处理,尤其是一种机械臂的数值仿真方法、装置、电子设备及存储介质。
背景技术:
1、随着人工智能和计算机技术的不断发展,机器人系统的应用领域和范围正在不断扩大,机械臂系统渗入到我们的工作和生活中。机械臂系统在居家生活、工业制造、电力行业以及国防等领域中都扮演着重要角色。尤其在工业制造流水线中,机械臂得到了大量的应用,例如汽车流水生产线中的焊接机械臂、搬运机械臂、喷漆机械臂等。随着工业流水线的扩大和智能化,机械臂被大规模的应用。
2、柔性机械具有零件少,组装方便,摩擦系数低,传动滞后短,生产成本低,研发成本高等特点,目前应用在微机械,医药和高精尖设备较多。传统刚性机械之所以一直霸占世界就因为其容易理解和设计,现在模拟技术更加先进,于是柔性机械得以发展。工业机械臂作为实现工业自动化生产的关键工具,广泛应用于化工石油、航空航天、汽车制造、精密装配、核试验等领域,发挥了非常重要的作用。然而,对于一些空间拥挤、结构复杂、障碍物密集的非规划工作区,传统的机械臂由于冗余度低、刚性结构适应性差,往往难以有效发挥自身优势。相对而言,柔性机械臂以其高冗余度和良好的适应性在解决上述问题中变得越来越重要。但是对于单连杆柔性机械臂的物理过程,现有技术数值仿真准确度较低。
技术实现思路
1、有鉴于此,本发明实施例提供一种机械臂的数值仿真方法、装置、电子设备及存储介质,能够准确进行机械臂的数值仿真。
2、一方面,本发明的实施例提供了一种机械臂的数值仿真方法,包括:
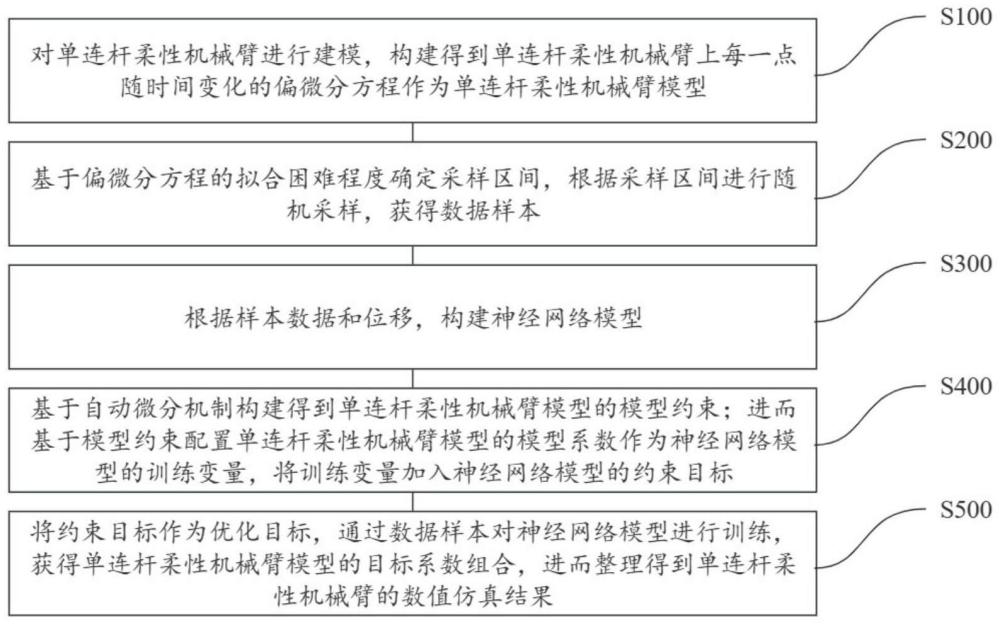
3、对单连杆柔性机械臂进行建模,构建得到单连杆柔性机械臂上每一点随时间变化的偏微分方程作为单连杆柔性机械臂模型;
4、基于偏微分方程的拟合困难程度确定采样区间,根据采样区间进行随机采样,获得数据样本;数据样本包括单连杆柔性机械臂的时空间的样本数据以及样本数据对应的位移;
5、根据样本数据和位移,构建神经网络模型;
6、基于自动微分机制构建得到单连杆柔性机械臂模型的模型约束;进而基于模型约束配置单连杆柔性机械臂模型的模型系数作为神经网络模型的训练变量,将训练变量加入神经网络模型的约束目标;
7、将约束目标作为优化目标,通过数据样本对神经网络模型进行训练,获得单连杆柔性机械臂模型的目标系数组合,进而整理得到单连杆柔性机械臂的数值仿真结果。
8、可选地,对单连杆柔性机械臂进行建模,构建得到单连杆柔性机械臂上每一点随时间变化的偏微分方程作为单连杆柔性机械臂模型,包括:
9、基于单连杆柔性机械臂的原点的挠性弯曲特性确定边界条件;
10、根据单连杆柔性机械臂上每一点随时间变化的垂直位移和角位移,获得单连杆柔性机械臂的偏移量方程;
11、基于边界条件和偏移量方程,结合哈密顿原理构建得到单连杆柔性机械臂上每一点随时间变化的偏微分方程作为单连杆柔性机械臂模型。
12、可选地,基于偏微分方程的拟合困难程度确定采样区间,根据采样区间进行随机采样,获得数据样本,包括:
13、基于偏微分方程的拟合困难程度,将单连杆柔性机械臂上空间中某一固定点随时间变化的区间、空间中各点在固定时间的区间以及空间中各点随时间变化的区间划分为不同的采样区间;
14、基于偏微分方程对应的采样区间的拟合困难程度,确定采样区间的拟合样本数;拟合困难程度与拟合样本数正相关;
15、根据拟合样本数,在采样区间进行均匀随机采样,获得时空间与位移对应的数据样本。
16、可选地,根据样本数据和位移,构建神经网络模型,包括:
17、将样本数据作为模型输入,并将位移作为模型输出,进而基于全连接层和残差神经网络层构建得到神经网络模型。
18、可选地,全连接层包括第一全连接层、第二全连接层和第三全连接层;基于全连接层和残差神经网络层构建得到神经网络模型,包括:
19、基于两个第一全连接层构建特征提取层;特征提取层用于对模型输入进行特征提取;
20、基于第二全连接层构建残差神经网络层;第二全连接层带有激活函数;
21、基于第三全连接层构建输出层;
22、根据特征提取层、残差神经网络层和输出层构建得到神经网络模型。
23、可选地,基于自动微分机制构建得到单连杆柔性机械臂模型的模型约束,包括:
24、基于自动微分机制,结合偏微分方程得到总体偏微分方程约束;
25、基于自动微分机制,结合单连杆柔性机械臂的边界条件得到边界条件约束;边界条件基于单连杆柔性机械臂的原点的挠性弯曲特性确定;
26、基于自动微分机制,结合单连杆柔性机械臂的温度初始条件得到温度初始条件约束;
27、根据总体偏微分方程约束、边界条件约束和温度初始条件约束构建得到单连杆柔性机械臂模型的模型约束。
28、可选地,通过数据样本对神经网络模型进行训练,获得单连杆柔性机械臂模型的目标系数组合,包括:
29、配置神经网络模型进行模型训练采用的优化器;
30、配置神经网络模型进行模型训练采用的损失函数的权重值;
31、基于预设的训练次数和学习率,通过数据样本对神经网络模型进行训练;
32、根据神经网络模型的训练结果重新配置损失函数的权重值,然后返回基于预设的训练次数和学习率,通过数据样本对神经网络模型进行训练这一步骤,直至损失函数的权重值小于预设阈值,获得单连杆柔性机械臂模型的目标系数组合。
33、另一方面,本发明的实施例提供了一种机械臂的数值仿真装置,包括:
34、第一模块,用于对单连杆柔性机械臂进行建模,构建得到单连杆柔性机械臂上每一点随时间变化的偏微分方程作为单连杆柔性机械臂模型;
35、第二模块,用于基于偏微分方程的拟合困难程度确定采样区间,根据采样区间进行随机采样,获得数据样本;数据样本包括单连杆柔性机械臂的时空间的样本数据以及样本数据对应的位移;
36、第三模块,用于根据样本数据和位移,构建神经网络模型;
37、第四模块,用于基于自动微分机制构建得到单连杆柔性机械臂模型的模型约束;进而基于模型约束配置单连杆柔性机械臂模型的模型系数作为神经网络模型的训练变量,将训练变量加入神经网络模型的约束目标;
38、第五模块,用于将约束目标作为优化目标,通过数据样本对神经网络模型进行训练,获得单连杆柔性机械臂模型的目标系数组合,进而整理得到单连杆柔性机械臂的数值仿真结果。
39、另一方面,本发明的实施例提供了一种电子设备,包括处理器以及存储器;
40、存储器用于存储程序;
41、处理器执行程序实现如前面的方法。
42、另一方面,本发明的实施例提供了一种计算机可读存储介质,存储介质存储有程序,程序被处理器执行实现如前面的方法。
43、本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
44、本发明实施例首先对单连杆柔性机械臂进行建模,构建得到单连杆柔性机械臂上每一点随时间变化的偏微分方程作为单连杆柔性机械臂模型;基于偏微分方程的拟合困难程度确定采样区间,根据采样区间进行随机采样,获得数据样本;数据样本包括单连杆柔性机械臂的时空间的样本数据以及样本数据对应的位移;根据样本数据和位移,构建神经网络模型;基于自动微分机制构建得到单连杆柔性机械臂模型的模型约束;进而基于模型约束配置单连杆柔性机械臂模型的模型系数作为神经网络模型的训练变量,将训练变量加入神经网络模型的约束目标;将约束目标作为优化目标,通过数据样本对神经网络模型进行训练,获得单连杆柔性机械臂模型的目标系数组合,进而整理得到单连杆柔性机械臂的数值仿真结果。本发明实施例基于物理信息融合神经网络的单连杆柔性机械臂的数学建模方法解决了在该领域数学建模困难的问题,并在运行的时间和精度上进行了优化。
- 还没有人留言评论。精彩留言会获得点赞!