基于三维重建与点云处理的航空叶片缺陷检测方法
本发明涉及三维视觉缺陷检测,具体涉及一种基于三维重建与点云处理的航空叶片缺陷检测方法。
背景技术:
1、航空发动机被称作是飞机的“心脏”,其性能的好坏将直接影响到飞机的正常运行。叶片是构成航空发动机的一种重要核心部件,同时它又是一种典型的高精度自由曲面零件。为了满足航空发动机性能和可靠性的要求,叶片必须具有准确的形状和精确的尺寸。根据其所在部位以及功能可以分为:涡轮叶片,导向叶片,压气机叶片等。不论是哪种航空叶片,其典型特点都可以概括为:形状复杂例如壁薄、叶身扭曲大等,材料特殊例如高温合金,加工工艺复杂,制造成本非常高。由于每台航空发动机安装有几百甚至更多的叶片,同时叶片表面为扭曲度较高的自由曲面,不同部位处曲面的曲率半径不同,使得叶片检测一直是航空发动机制造企业中生产和检测部门所面临的难题之一。
2、机器视觉方法具有非接触式、测量范围广、采集数据速度快、成本较低、受人为因素影响小等优点,已经越来越广泛地代替人工视觉而应用于缺陷检测与测量。然而目前大多数叶片缺陷的机器视觉检测方法是通过二维图像处理方法,易受到不同角度光线影响、只能提供两个维度的缺陷信息,无法反映缺陷高度或深度信息,且大多只适用于规则平面,难以用于航空叶片等复杂曲面。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供一种基于三维重建与点云处理的航空叶片缺陷检测方法。
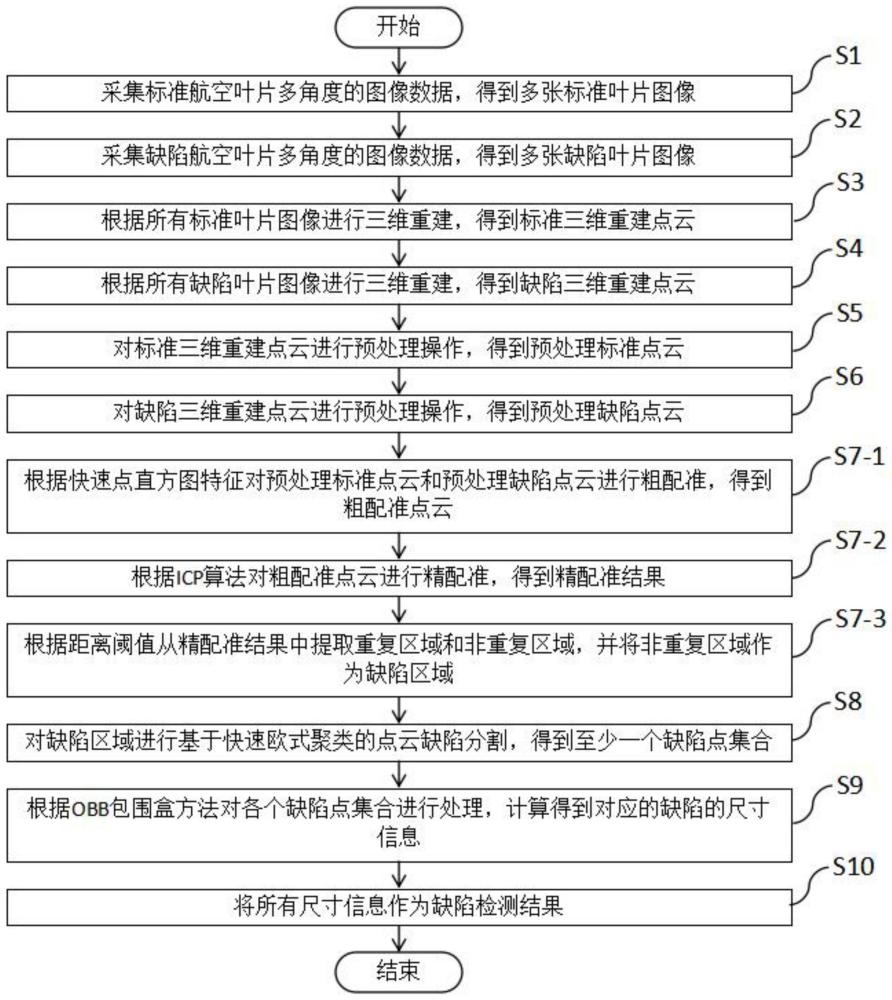
2、本发明提供了一种基于三维重建与点云处理的航空叶片缺陷检测方法,根据标准航空叶片和缺陷航空叶片得到该缺陷航空叶片的缺陷检测结果,具有这样的特征,包括:采集标准航空叶片多角度的图像数据,得到多张标准叶片图像;采集缺陷航空叶片多角度的图像数据,得到多张缺陷叶片图像;根据所有标准叶片图像进行三维重建,得到标准三维重建点云;根据所有缺陷叶片图像进行三维重建,得到缺陷三维重建点云;对标准三维重建点云进行预处理操作,得到预处理标准点云;对缺陷三维重建点云进行预处理操作,得到预处理缺陷点云,根据预处理标准点云和预处理缺陷点云得到缺陷检测结果包括以下步骤:步骤s1,对预处理标准点云和预处理缺陷点云进行配准,并根据距离阈值得到非重复区域作为缺陷区域;步骤s2,对缺陷区域进行基于快速欧式聚类的点云缺陷分割,得到至少一个缺陷点集合,缺陷点集合为预处理缺陷点云中多个点的集合;步骤s3,根据obb包围盒方法对各个缺陷点集合进行处理,计算得到对应的缺陷的尺寸信息;步骤s4,将所有尺寸信息作为缺陷检测结果。
3、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,根据图像进行三维重建得到对应的三维重建点云的过程,包括以下步骤:步骤t1,通过运动恢复结构算法对所有图像进行处理,得到对应的相机位姿数据和三维稀疏点云结构;步骤t2,将各个图像、相机位姿数据和三维系数点云结构输入现有的cascade-mvsnet模型,得到对应的深度图;步骤t3,将所有深度图进行点云融合,得到三维重建点云。
4、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,根据三维重建点云进行预处理操作得到对应的预处理点云的过程,包括以下步骤:步骤r1,对三维重建点云进行尺度变换至真实尺寸,得到真实点云;步骤r2,对真实点云进行直通滤波,得到曲面点云;步骤r3,对曲面点云通过体素栅格法进行降采样,得到精简点云;步骤r4,对精简点云进行统计滤波,得到预处理点云。
5、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,步骤s1包括以下子步骤:步骤s1-1,根据快速点直方图特征对预处理标准点云和预处理缺陷点云进行粗配准,得到粗配准点云;步骤s1-2,根据icp算法对粗配准点云进行精配准,得到精配准结果;步骤s1-3,根据距离阈值从精配准结果中提取重复区域和非重复区域,并将非重复区域作为缺陷区域。
6、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,步骤s2包括以下子步骤:步骤s2-1,设置缺陷区域中所有点的标签lab为0,seglab的值为1,聚类半径阈值为rth;步骤s2-2,从缺陷区域的所有点中选取一个标签lab为0的点作为查询点;步骤s2-3,将缺陷区域中与查询点的欧氏距离小于聚类半径阈值的点的集合作为邻域点集pn;步骤s2-4,判断邻域点集pn中的点的标签lab是否均为0,若是,则将邻域点集pn的点的标签lab赋值为seglab,并将seglab的值加1,若否,则将邻域点集pn的点的标签lab赋值为minseglab,minseglab为邻域点集pn中非零的标签lab中的最小值;步骤s2-5,重复步骤s2-2至步骤s2-4,直至所有点的标签lab均不为0,则将标签lab相同的点作为缺陷点集合。
7、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,欧氏距离的计算公式为:式中d(pi,pj)为点pi和pj之间的欧氏距离,pik和pjk分别表示pi和pj邻域中的任意一点。
8、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,步骤s3包括以下子步骤:步骤s3-1,计算缺陷点合集的质心坐标;步骤s3-2,根据质心坐标计算缺陷点合集中各个点的协方差矩阵,得到对应的特征值和特征向量;步骤s3-3,将最大的特征值对应的特征向量作为obb主轴方向;步骤s3-4,将缺陷点合集中各个点投影至obb坐标系,得到缺陷点合集在obb坐标系的各个坐标轴上的最大值xmax、ymax和zmax以及最小值xmin、ymin和zmin;步骤s3-5,根据xmax、ymax、zmax、xmin、ymin和zmin计算得到包围盒的8个顶点的坐标;步骤s3-6,将8个坐标均逆变换回缺陷点合集的坐标系,得到对应的原始顶点坐标;步骤s3-7,根据所有原始顶点坐标,在预处理缺陷点云上构建包围盒作为缺陷标注;步骤s3-8,根据xmax、ymax、zmax、xmin、ymin和zmin计算得到包围盒的边长l1、l2和l3;步骤s3-9,将边长l1、l2和l3进行尺度变换得到真实长、真实宽和真实深度作为尺寸信息。
9、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,在步骤s3-1中,缺陷点合集q的质心坐标(rx,ry,rz)的计算公式为:式中nq为缺陷点合集q中点的总数,xi为点i在x轴上的值,yi为点i在y轴上的值,zi为点i在z轴上的值。
10、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,在步骤s3-1中,缺陷点合集q的质心坐标(rx,ry,rz)的计算公式为:式中nq为缺陷点合集q中点的总数,xi为点i在x轴上的值,yi为点i在y轴上的值,zi为点i在z轴上的值。
11、在本发明提供的基于三维重建与点云处理的航空叶片缺陷检测方法中,还可以具有这样的特征:其中,在步骤s3-8中,边长l1、l2和l3的计算公式为:l1=|xmax-xmin|,l2=|ymax-ymin|,l3=|zmax-zmin|。
12、发明的作用与效果
13、根据本发明所涉及的基于三维重建与点云处理的航空叶片缺陷检测方法,因为,通过多角度的叶片图像,结合cascade-mvsnet模型进行三维重建,从而兼顾精度和效率,且硬件设备成本低于专门用于三维重建的光学仪器设备;在预处理操作中采用直通滤波快速分离叶片曲面点云并通过体素栅格法进行降采样对点云进行精简,降低后续计算量提高处理效率;基于快速欧式聚类对缺陷进行提取,提升了计算效率;基于obb包围盒实现三维缺陷检测的可视化以及缺陷尺寸计算。所以,本发明的基于三维重建与点云处理的航空叶片缺陷检测方法能够精确获取缺陷的三维形状信息,实现对复杂曲面表面缺陷的多维度检测。
- 还没有人留言评论。精彩留言会获得点赞!