基于视频跟踪的集卡锁头检测方法、装置、设备及介质与流程
本发明涉及集装箱锁头检测术领域,特别是涉及一种基于视频跟踪的集卡锁头检测方法、装置、计算机设备以及计算机可读存储介质。
背景技术:
1、港口位于水陆交通的集结点和枢纽处,是一个区域经济发展的重要交通基础设施。集装箱卡车(简称集卡)的锁头检测是集装箱港口行业重要的一部分。如果集装箱的锁头未正常分离,会存在安全隐患,严重时,甚至会导致人员伤亡和车辆损失。目前,对于集装箱卡车的锁头检测方法包括人工检测和机器检测两种方式。人工检测方式效率低,安全隐患较大。机器检测由于效率高,操作方便等优点,基本上已经完全取代了人工检测方式。
2、然而,现有机器检测存在不足,比如利用激光扫描系统监测集装箱与集卡的拖板连接区域是否有空隙,据此进行粘合判断,完成锁头检测。由于激光扫描系统的报警会有延迟,导致可能事故已经发生才给出预警信号。
技术实现思路
1、本发明的目的是为克服现有上述的技术中的缺陷,而提供一种基于视频跟踪的集卡锁头检测方法。
2、本发明第一方面,提供一种基于视频跟踪的集卡锁头检测方法,包括:
3、s1.获取集装箱起吊前集卡托板长度方向一端相对两侧的陆侧视频监控区域的第一陆侧初始图像与海测视频监控区域的第一海侧初始图像;
4、s2.分别对所述第一陆侧初始图像和所述第一海测初始图像进行识别处理,定位第一陆侧目标箱孔和第一海测目标箱孔;
5、s3.在所述第一陆侧初始图像中确定出第一陆侧目标锁头对应的第一陆侧目标跟踪区域;在所述第一海侧初始图像中确定出第一海侧目标锁头对应的第一海测目标跟踪区域;
6、s4.跟踪分析陆侧箱底与海侧箱底运动轨迹,判断是否存在海测锁头与陆侧锁头;
7、s5.判断出现陆侧海测锁头时,进行示警。
8、其中,步骤s3中,基于集装箱起吊前集装箱上的箱孔与集卡托板上的对应锁头之间的相对位置,通过所述第一陆侧目标箱孔在所述第一陆侧初始图像中的实际位置,在所述第一陆侧初始图像中确定出第一陆侧目标锁头对应的第一陆侧目标跟踪区域,同时通过所述第一海侧目标箱孔在所述第一海侧初始图像中的实际位置,在所述第一海侧初始图像中确定出第一海侧目标锁头对应的第一海测目标跟踪区域。
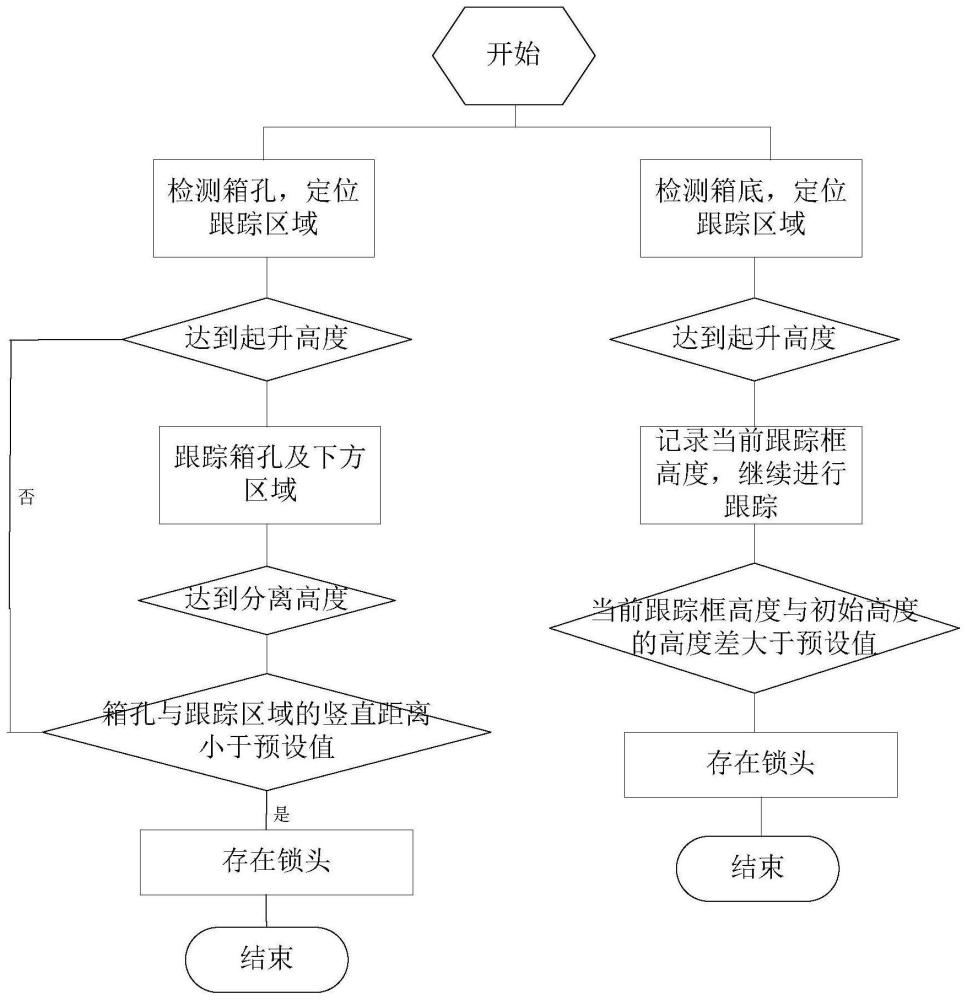
9、其中,步骤s3中,随着集卡的吊起,当陆侧视频监控图像中出现海侧的箱孔底部时,对整个箱底进行检测和定位,通过所述集装箱的箱底的图像确定海测锁头目标跟踪区域;当海测视频监控图像中出现陆侧的箱孔底部时,对整个集装箱的箱底进行检测和定位,通过所述箱底的图像确定陆测锁头目标跟踪区域。
10、其中,步骤s4中,分析陆侧箱底与海侧箱底的运动轨迹,判断是否存在海测锁头、陆侧锁头,包括:
11、监测所述陆侧箱孔、海侧箱孔的运动轨迹,当所述陆侧箱孔、海侧箱孔的高度达到各自的起判高度时,进入陆侧锁头、海侧锁头的跟踪状态,同时根据陆侧目标箱孔及海侧目标箱孔的位置确定陆侧目标锁头、海侧目标锁头的初始跟踪区域。
12、其中,步骤s4中,确定陆侧目标锁头、海侧目标锁头的初始跟踪区域后,还包括:
13、将所述陆侧目标箱孔、海侧目标箱孔的运动轨迹和对应的陆侧锁头、海侧锁头的运动轨迹上的竖直距离各自与预设值比较,判断是否存在陆侧锁头、海侧锁头,若对应的竖直距离小于预设值,则判断存在陆侧锁头、海侧锁头;若对应的竖直距离大于预设值,则判断不存在陆侧锁头、海侧锁头,将对应位置记为陆侧锁头、海侧锁头的重新初始跟踪位置并重新开始跟踪。
14、其中,步骤s4中,还进一步的包括:
15、在跟踪监测过程中,随着集卡上升,当检测到箱底达到海测、陆侧对应的起判高度时,根据箱底得到海侧锁头、陆侧锁头的初始跟踪区域,分析海侧锁头、陆侧锁头的运动轨迹;当海侧锁头、陆侧锁头的竖直距离大于分离高度时,判断海侧锁头、陆侧锁头的高度与初始跟踪区域的高度的高度差;当高度差大于预设值时,判断存在海侧锁头、陆侧锁头,否则不存在海侧锁头、陆侧锁头。
16、本发明第二方面,提供基于视频跟踪的集卡锁头分离检测装置,用于执行所述的基于视频跟踪的集卡锁头检测方法的步骤,包括陆侧视频监控以及海侧视频监控设备,在监测过程中,所述陆侧视频监控以及海侧视频监控设备获取集装箱起吊前集卡托板长度方向一端相对两侧的陆侧视频监控区域的第一陆侧初始图像与海测视频监控区域的第一海侧初始图像;分别对所述第一陆侧初始图像和所述第一海测初始图像进行识别处理,定位第一陆侧目标箱孔和第一海测目标箱孔;基于集装箱起吊前集装箱上的箱孔与集卡托板上的锁头之间的相对位置,通过所述第一陆侧目标箱孔在所述第一陆侧初始图像中的实际位置,在所述第一陆侧初始图像中确定出第一陆侧目标锁头对应的第一陆侧目标跟踪区域;通过所述第一海侧目标箱孔在所述第一海侧初始图像中的实际位置,在所述第一海侧初始图像中确定出第一海侧目标锁头对应的第一海测目标跟踪区域;分析陆侧箱底与海侧箱底运动轨迹,判断是否存在海测锁头与陆侧锁头;判断出现陆侧海测锁头时,进行示警。
17、本发明第三方面,提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述基于视频跟踪的集卡锁头检测方法的步骤。
18、本发明第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述的基于视频跟踪的集卡锁头检测方法的步骤。
19、本发明的基于视频跟踪的集卡锁头分离检测技术,具有较高的准确性和实时性能,能有效检测出锁头的状态,从而保证生产作业的安全性。
技术特征:
1.基于视频跟踪的集卡锁头检测方法,其特征在于,包括步骤:
2.根据权利要求1所述基于视频跟踪的集卡锁头检测方法,其特征在于,步骤s3中,基于集装箱起吊前集装箱上的箱孔与集卡托板上的对应锁头之间的相对位置,通过所述第一陆侧目标箱孔在所述第一陆侧初始图像中的实际位置,在所述第一陆侧初始图像中确定出第一陆侧目标锁头对应的第一陆侧目标跟踪区域,同时通过所述第一海侧目标箱孔在所述第一海侧初始图像中的实际位置,在所述第一海侧初始图像中确定出第一海侧目标锁头对应的第一海测目标跟踪区域。
3.根据权利要求1所述基于视频跟踪的集卡锁头检测方法,其特征在于,步骤s3中,随着集卡的吊起,当陆侧视频监控图像中出现海侧的箱孔底部时,对整个箱底进行检测和定位,通过所述集装箱的箱底的图像确定海测锁头目标跟踪区域;当海测视频监控图像中出现陆侧的箱孔底部时,对整个集装箱的箱底进行检测和定位,通过所述箱底的图像确定陆测锁头目标跟踪区域。
4.根据权利要求1所述基于视频跟踪的集卡锁头检测方法,其特征在于,步骤s4中,分析陆侧箱底与海侧箱底的运动轨迹,判断是否存在海测锁头、陆侧锁头,包括:
5.根据权利要求3所述基于视频跟踪的集卡锁头检测方法,其特征在于,步骤s4中,确定陆侧目标锁头、海侧目标锁头的初始跟踪区域后,还包括:
6.根据权利要求4所述基于视频跟踪的集卡锁头检测方法,其特征在于,步骤s4中,还进一步的包括:
7.基于视频跟踪的集卡锁头分离检测装置,其特征在于,用于执行权利要求1-6任一项所述的基于视频跟踪的集卡锁头检测方法的步骤,包括陆侧视频监控以及海侧视频监控设备,在监测过程中,所述陆侧视频监控以及海侧视频监控设备获取集装箱起吊前集卡托板长度方向一端相对两侧的陆侧视频监控区域的第一陆侧初始图像与海测视频监控区域的第一海侧初始图像;分别对所述第一陆侧初始图像和所述第一海测初始图像进行识别处理,定位第一陆侧目标箱孔和第一海测目标箱孔;基于集装箱起吊前集装箱上的箱孔与集卡托板上的锁头之间的相对位置,通过所述第一陆侧目标箱孔在所述第一陆侧初始图像中的实际位置,在所述第一陆侧初始图像中确定出第一陆侧目标锁头对应的第一陆侧目标跟踪区域;通过所述第一海侧目标箱孔在所述第一海侧初始图像中的实际位置,在所述第一海侧初始图像中确定出第一海侧目标锁头对应的第一海测目标跟踪区域;分析陆侧箱底与海侧箱底运动轨迹,判断是否存在海测锁头与陆侧锁头;判断出现陆侧海测锁头时,进行示警。
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述基于视频跟踪的集卡锁头检测方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的基于视频跟踪的集卡锁头检测方法的步骤。
技术总结
本发明公开基于视频跟踪的集卡锁头检测方法、装置、设备以及介质。集卡锁头检测方法包括:获取第一陆侧初始图像与第一海侧初始图像;对所述第一陆侧初始图像和所述第一海测初始图像识别处理,定位第一陆侧目标箱孔和第一海测目标箱孔;在第一陆侧初始图像中确定出第一陆侧目标锁头对应的第一陆侧目标跟踪区域;在第一海侧初始图像中确定出第一海侧目标锁头对应的第一海测目标跟踪区域;跟踪分析陆侧箱底与海侧箱底运动轨迹,判断是否存在海测锁头与陆侧锁头;判断出现陆侧海测锁头时,进行示警。本发明的基于视频跟踪的集卡锁头分离检测技术,具有较高的准确性和实时性能,能有效检测出锁头的状态,从而保证生产作业的安全性。
技术研发人员:申明昊,李永华,王辉,刘悦,石正雄,李辉辉,田德雨
受保护的技术使用者:天津港欧亚国际集装箱码头有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!