考虑试验误差的腿式着陆器动力学模型修正方法及装置
本发明涉及动力学模型修正,特别涉及一种考虑试验误差的腿式着陆器动力学模型修正方法及装置。
背景技术:
1、近年来,国际上深空探测技术快速发展,对于地外行行探测的研究逐渐成为航天领域的研究热点之一。由于太空中引力条件与地球不同、附着面地形信息不确定,因此需要建立附着过程的动力学仿真模型来充分验证不确定条件下附着的可行性与安全性。在航天产品中,需要尽可能提供产品的可靠性,因此为了提高仿真模型计算结果的准确度,需要对建立的仿真模型进行模型修正,尤其针对于地形条件尚不明确下的碰撞模型。
2、模型修正技术通常选定需要修正的参数,优化仿真分析值与物理试验值的相对误差。常见的动力学模型修正中不考虑物理试验存在的误差,当试验设备及方法存在一定误差时,直接进行模型修正会出现求解困难、难以收敛的情况,即使得到的修正参数也存在可靠性低的问题。因此,亟待一种能够提升模型修正计算效率、降低修正参数误差率的修正方法。
技术实现思路
1、本发明提供一种考虑试验误差的腿式着陆器动力学模型修正方法及装置,以解决常见的动力学模型修正中不考虑物理试验存在的误差,修正过程中会出现求解困难、难以收敛、可靠性低等问题。
2、本发明第一方面实施例提供一种考虑试验误差的腿式着陆器动力学模型修正方法,包括以下步骤:
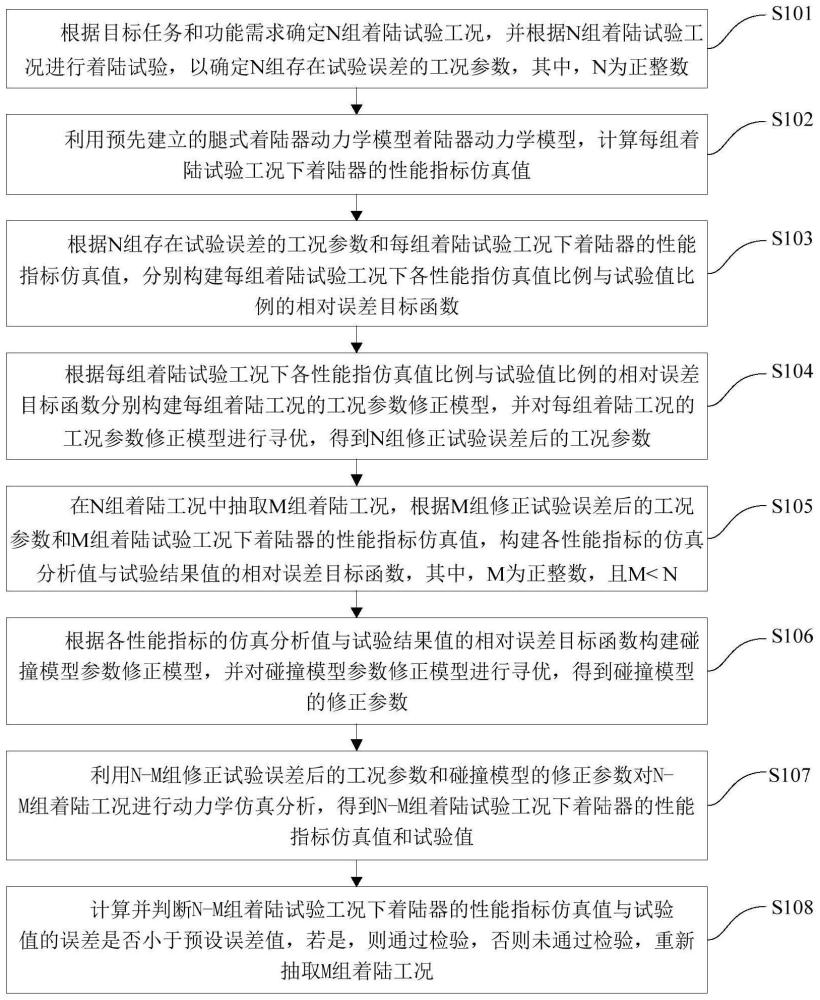
3、根据目标任务和功能需求确定n组着陆试验工况,并根据所述n组着陆试验工况进行着陆试验,以确定n组存在试验误差的工况参数,其中,n为正整数;
4、利用预先建立的腿式着陆器动力学模型,计算每组着陆试验工况下着陆器的性能指标仿真值;
5、根据所述n组存在试验误差的工况参数和所述每组着陆试验工况下着陆器的性能指标仿真值,分别构建每组着陆试验工况下各性能指仿真值比例与试验值比例的相对误差目标函数;
6、根据所述每组着陆试验工况下各性能指仿真值比例与试验值比例的相对误差目标函数分别构建每组着陆工况的工况参数修正模型,并对所述每组着陆工况的工况参数修正模型进行寻优,得到n组修正试验误差后的工况参数;
7、在所述n组着陆工况中抽取m组着陆工况,根据m组修正试验误差后的工况参数和m组着陆试验工况下着陆器的性能指标仿真值,构建各性能指标的仿真分析值与试验结果值的相对误差目标函数,其中,m为正整数,且m<n;
8、根据所述各性能指标的仿真分析值与试验结果值的相对误差目标函数构建碰撞模型参数修正模型,并对碰撞模型参数修正模型进行寻优,得到碰撞模型的修正参数;
9、利用n-m组修正试验误差后的工况参数和所述碰撞模型的修正参数对n-m组着陆工况进行动力学仿真分析,得到n-m组着陆试验工况下着陆器的性能指标仿真值和试验值;
10、计算并判断所述n-m组着陆试验工况下着陆器的性能指标仿真值与试验值的误差是否小于预设误差值,若是,则通过检验,否则未通过检验,重新抽取所述m组着陆工况。
11、可选地,所述利用预先建立的腿式着陆器动力学模型,计算每组着陆试验工况下着陆器的性能指标仿真值,包括:
12、基于所述预先建立的腿式着陆器动力学模型,采用库伦摩擦模型模拟着陆器足垫与着陆面之间的切向接触力,采用非线性弹簧阻尼模拟着陆器足垫与着陆面之间的法向接触力;
13、利用所述切向接触力和所述法向接触力计算所述每组着陆试验工况下着陆器的性能指标仿真值。
14、可选地,所述预先建立的腿式着陆器动力学模型包括附着机构由支撑杆、信号装置和足垫。
15、可选地,所述每组着陆试验工况下着陆器的性能指标仿真值包括附着机构根部所受力大小和附着机构根部所受力矩大小。
16、可选地,所述根据所述每组着陆试验工况下各性能指仿真值比例与试验值比例的相对误差目标函数分别构建每组着陆工况的工况参数修正模型,并对所述每组着陆工况的工况参数修正模型进行寻优,得到n组修正试验误差后的工况参数,包括:
17、根据所述每组着陆试验工况下各性能指仿真值比例与试验值比例的相对误差目标函数分别构建所述每组着陆工况的工况参数修正模型;
18、以最小化每组着陆试验工况下各性能指仿真值比例与试验值比例的相对误差为优化目标,采用多岛遗传算法对所述每组着陆工况的工况参数修正模型进行迭代多目标优化求解,直至每组多岛遗传算法迭代运算过程收敛,得到每组着陆工况修正试验误差后的工况参数,构成所述n组修正试验误差后的工况参数。
19、可选地,所述在所述n组着陆工况中抽取m组着陆工况,根据m组修正试验误差后的工况参数和m组着陆试验工况下着陆器的性能指标仿真值,构建各性能指标的仿真分析值与试验结果值的相对误差目标函数,包括:
20、采用蒙特卡罗法在所述n组着陆工况中抽取m组着陆工况;
21、根据所述m组修正试验误差后的工况参数和所述m组着陆试验工况下着陆器的性能指标仿真值,构建各性能指标的仿真分析值与试验结果值的相对误差目标函数。
22、可选地,所述根据所述各性能指标的仿真分析值与试验结果值的相对误差目标函数构建碰撞模型参数修正模型,并对碰撞模型参数修正模型进行寻优,得到碰撞模型的修正参数,包括:
23、根据所述各性能指标的仿真分析值与试验结果值的相对误差目标函数构建所述碰撞模型参数修正模型;
24、以最小化m组着陆试验工况下所有性能指标的仿真分析值和试验结果值的相对误差为优化目标,采用多岛遗传算法对所述碰撞模型参数修正模型进行迭代多目标优化求解,直至多岛遗传算法迭代运算过程收敛,得到所述碰撞模型的修正参数。
25、本发明第二方面实施例提供一种考虑试验误差的腿式着陆器动力学模型修正装置,包括:
26、确定参数模块,用于根据着陆器的目标任务和功能需求确定n组着陆试验工况,并根据所述n组着陆试验工况进行着陆试验,以确定n组存在试验误差的工况参数,其中,n为正整数;
27、第一性能指标计算模块,用于利用预先建立的腿式着陆器动力学模型,计算每组着陆试验工况下着陆器的性能指标仿真值;
28、第一构建模块,用于根据所述n组存在试验误差的工况参数和所述每组着陆试验工况下着陆器的性能指标仿真值,分别构建每组着陆试验工况下各性能指仿真值比例与试验值比例的相对误差目标函数;
29、物理试验参数修正模块,用于根据所述每组着陆试验工况下各性能指仿真值比例与试验值比例的相对误差目标函数分别构建每组着陆工况的工况参数修正模型,并对所述每组着陆工况的工况参数修正模型进行寻优,得到n组修正试验误差后的工况参数;
30、第二构建模块,用于在所述n组着陆工况中抽取m组着陆工况,根据m组修正试验误差后的工况参数和m组着陆试验工况下着陆器的性能指标仿真值,构建各性能指标的仿真分析值与试验结果值的相对误差目标函数,其中,m为正整数,且m<n;
31、动力学模型修正模块,用于根据所述各性能指标的仿真分析值与试验结果值的相对误差目标函数构建碰撞模型参数修正模型,并对碰撞模型参数修正模型进行寻优,得到碰撞模型的修正参数;
32、第二性能指标计算模块,用于利用n-m组修正试验误差后的工况参数和所述碰撞模型的修正参数对n-m组着陆工况进行动力学仿真分析,得到n-m组着陆试验工况下着陆器的性能指标仿真值和试验值;
33、检验模块,用于计算并判断所述n-m组着陆试验工况下着陆器的性能指标仿真值与试验值的误差是否小于预设误差值,若是,则通过检验,否则未通过检验,重新抽取所述m组着陆工况。
34、本发明第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的考虑试验误差的腿式着陆器动力学模型修正方法。
35、本发明第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的考虑试验误差的腿式着陆器动力学模型修正方法。
36、本发明实施例提出的考虑试验误差的腿式着陆器动力学模型修正方法及装置,不仅对动力学模型进行修正,还考虑了物理试验中存在的误差,解决了直接进行动力学模型修正会出现求解困难、难以收敛、可靠性低等问题,有利于提升模型修正计算效率、降低修正参数误差率。
37、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!